") 應(yīng)用在汽車(chē)測(cè)距雷達(dá)中的測(cè)距傳感芯片
應(yīng)用在汽車(chē)測(cè)距雷達(dá)中的測(cè)距傳感芯片
倒車(chē)?yán)走_(dá)是汽車(chē)泊車(chē)安全輔助裝置,在倒車(chē)時(shí),自動(dòng)啟動(dòng)倒車(chē)?yán)走_(dá),不用回頭看就可以知道車(chē)后有沒(méi)有障礙物,是以聲音或者更直觀的顯示監(jiān)測(cè)告訴賀駛員車(chē)輛周?chē)恼系K物,可以彌補(bǔ)駕駛員視野看不到的死角和視線模糊的地方,使停車(chē)和倒車(chē)更容易、更安全。
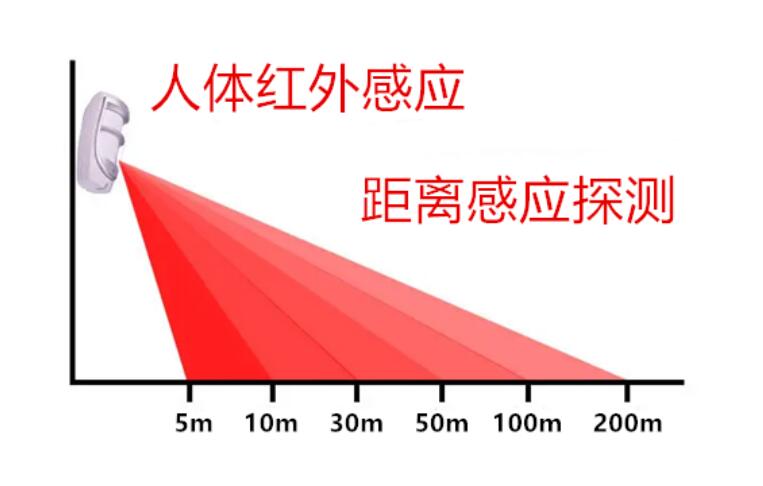
雷達(dá)的工作原理是:雷達(dá)設(shè)備發(fā)射電磁波信號(hào)后,如果有目標(biāo)物體碰到雷達(dá)信號(hào)就會(huì)反射回波,雷達(dá)接收器就會(huì)接收到回波信號(hào),回波信號(hào)包含了目標(biāo)的距離、方向和速度信息,雷達(dá)天線接收反射波后送至接收設(shè)備進(jìn)行處理,提取有關(guān)該物體的某些信息,根據(jù)雷達(dá)發(fā)射波束還能測(cè)得出目標(biāo)的角度。
倒車(chē)?yán)走_(dá)是根據(jù)蝙蝠在黑夜里高速飛行而不會(huì)與任何障礙物相撞的原理設(shè)計(jì)開(kāi)發(fā)的。雷達(dá)的優(yōu)點(diǎn)是白天黑夜均能探測(cè)遠(yuǎn)距離的目標(biāo),且不受霧、云和雨的阻擋,可以全天候、全天時(shí)工作的特點(diǎn),并有一定的穿透能力。
倒車(chē)?yán)走_(dá)裝置裝在駕駛臺(tái)上,它不停地提醒司機(jī)車(chē)距后面物體還有多少距離,到危險(xiǎn)距離時(shí),蜂鳴器就開(kāi)始鳴叫,提醒司機(jī)對(duì)障礙物的靠近,及時(shí)停車(chē)。
該系統(tǒng)讓倒車(chē)時(shí),車(chē)后的狀況更加直觀一目了然,對(duì)于倒車(chē)安全來(lái)說(shuō)是非常實(shí)用的配置之一。當(dāng)掛倒車(chē)擋時(shí),該系統(tǒng)會(huì)自動(dòng)接通位于車(chē)尾的高清倒車(chē)攝像頭,將車(chē)后狀況清晰的顯示于倒車(chē)液晶顯示屏上,讓你準(zhǔn)確把握后方路況,倒車(chē)亦如前進(jìn)般自如、自信。
這里推薦臺(tái)灣旺泓的光距感接近傳感芯片- WH APS 4530A,它的暗電流小,低照度響應(yīng),靈敏度高,電流隨光照度增強(qiáng)呈線性變化,還內(nèi)置雙敏感元,自動(dòng)衰減近紅外,光譜響應(yīng)接近人眼函數(shù)曲線。
WH4530A是一種光到數(shù)字轉(zhuǎn)換器,它結(jié)合了環(huán)境光傳感器、接近傳感器和高效率的紅外LED燈。環(huán)境光傳感器(ALS)內(nèi)置了一個(gè)濾光器來(lái)抑制紅外,并提供了一個(gè)接近人眼反應(yīng)的光譜。ALS可以在黑暗到陽(yáng)光直射下工作,可選擇的探測(cè)范圍約為40dB。雙通道輸出(人眼和清晰),使ALS在不同光照條件下具有良好的光比。近距離傳感器(PS)內(nèi)置了一個(gè)940nm的濾光片,用于環(huán)境光的抗擾,因此PS可以檢測(cè)反射紅外光,具有高精度和優(yōu)良的抗擾性。WH4530A具有可編程中斷功能,對(duì)ALS和PS具有基于閾值的遲滯。
光距感接近傳感芯片- WH APS4530A的應(yīng)用:
手機(jī)設(shè)備:手機(jī),平板電腦,PDA,移動(dòng)POS機(jī),TWS藍(lán)牙耳機(jī)
消費(fèi)設(shè)備:液晶電視,iTOF相機(jī),玩具
計(jì)算設(shè)備:筆記本電腦,液晶顯示器
戶(hù)外:監(jiān)控系統(tǒng),路燈
工業(yè)應(yīng)用:汽車(chē)測(cè)距雷達(dá)
審核編輯黃宇
-
芯片
+關(guān)注
關(guān)注
459文章
52160瀏覽量
436049 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
3075瀏覽量
119390 -
測(cè)距傳感器
+關(guān)注
關(guān)注
0文章
77瀏覽量
20425
發(fā)布評(píng)論請(qǐng)先 登錄
Nordic測(cè)距介紹
UWB 定位測(cè)距
激光雷達(dá)技術(shù)在自動(dòng)駕駛汽車(chē)中的應(yīng)用

毫米波雷達(dá)如何提高測(cè)距精度
汽車(chē)雷達(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場(chǎng)景
UWB模塊的測(cè)距精度分析
物聯(lián)網(wǎng)系統(tǒng)中的高精度測(cè)距方案_單點(diǎn)TOF激光雷達(dá)

激光測(cè)距傳感器怎么接線
激光測(cè)距傳感器輸出什么信號(hào)
激光測(cè)距傳感器的安裝方式有哪些
激光測(cè)距傳感器的缺點(diǎn)有哪些
激光測(cè)距傳感器的工作原理是什么?
lidar傳感器和激光測(cè)距傳感器的區(qū)別
以激光作為光源進(jìn)行測(cè)距的接近傳感芯片WH4530A
UWB測(cè)距典型應(yīng)用:人車(chē)測(cè)距防撞





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論