 基于NeRF的三維場景重建和理解
基于NeRF的三維場景重建和理解
如果從方法出發的話,兩張圖就能看懂:
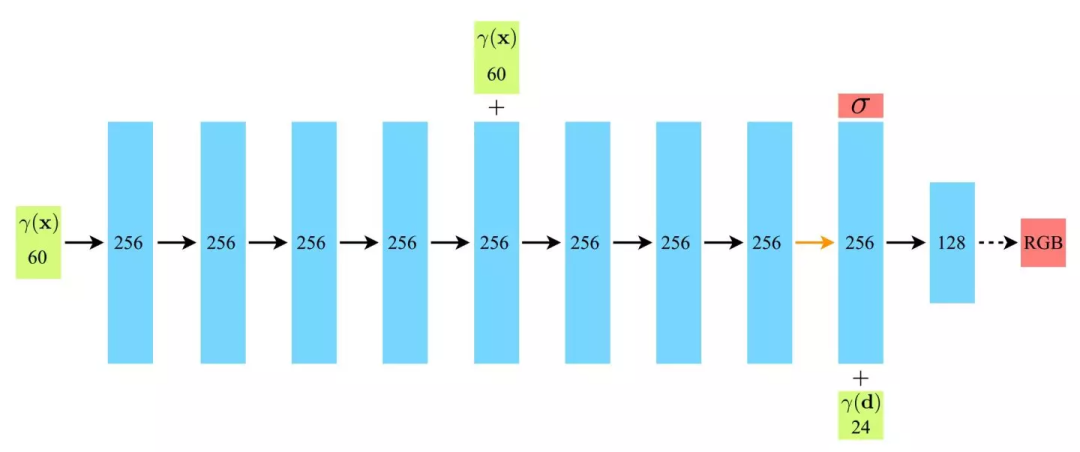
圖 1
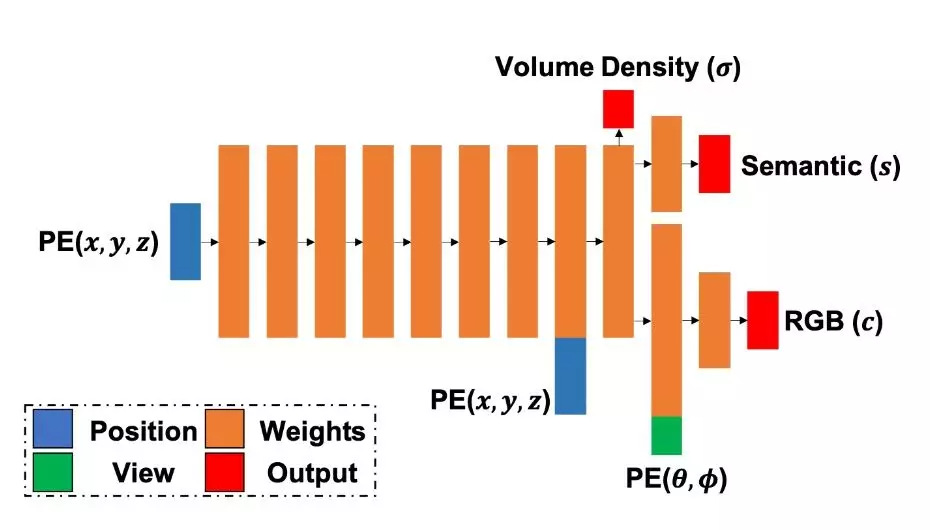
圖 2 上面是 NeRF 的網絡結構,下面是 Semantic-NeRF 的網絡結構,就是在 NeRF 的網絡中加了一個分支,輸出到語義。和 NeRF 一樣,Semantic-NeRF 能夠連續的表達空間信息,因此你可以看到 Semantic-NeRF 主頁里的各種酷炫的 demo. 這是 ICCV 2021 的 oral 工作。 如果有留意上一講的講座,從 Semantic-NeRF 的demo中你應該能推測出,這應該是第四種拍攝方式:
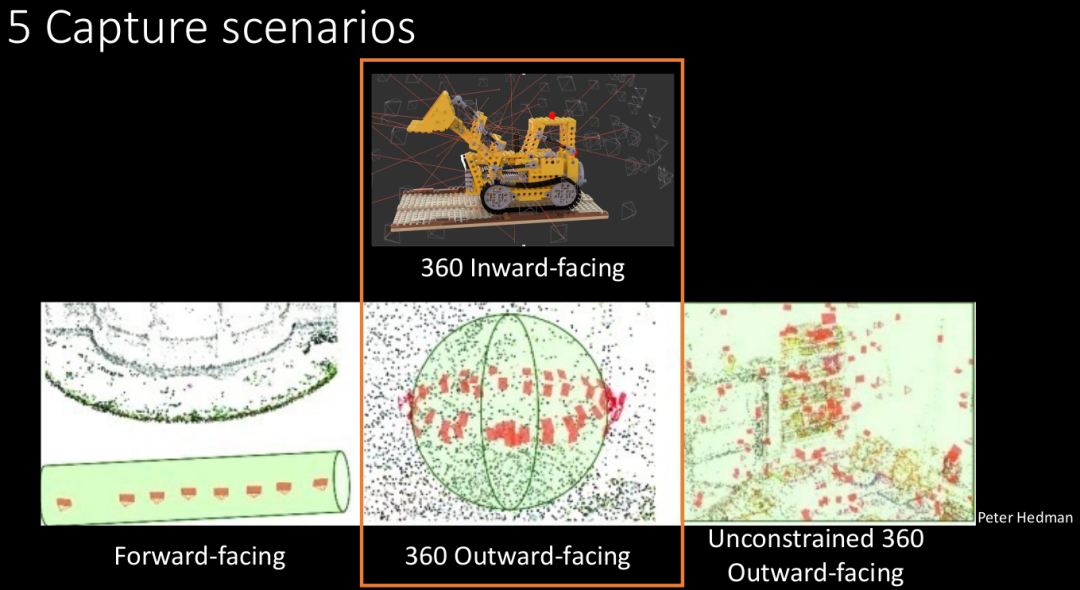
圖 3 這種拍攝方式在SLAM或者SFM中更多見,而傳統三維重建或者RGBD重建是很難做出 NeRF 或者 Semantic-NeRF 這種效果的。所以方法可能很簡單,但是這個工作很有意義。 應用的話,大家可以參考視頻。
Semantic-NeRF應用
稀疏監督下的新視角語義生成(Semantic View Synthesis with Sparse Labels
語義標簽去噪(LabelDenoising
語義標簽超分辨(Super-Resolution)
稀疏語義標簽傳播(LabelPropagation)
多視角語義融合(Multi-view Semantic Fusion)
稠密的語義三維重建
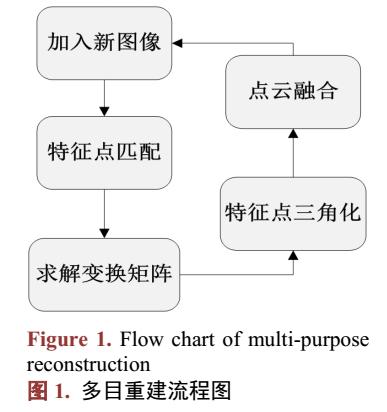
在這篇工作之后智博又做了 iLabel 的工作,將 imap 和 semantic-NeRF 結合,這里我們就不細講了,感興趣的同學歡迎去看原文。 需要提到的另一篇工作是 NeSF 這篇文章。 智博在講解 NeSF 的時候提到,訓練的sample是場景,而不是圖片,這是對這篇文章的一個高度概況。NeSF 首先會訓練許多場景,比如100個場景,那我們就會得到100個 NeRF 的模型,我們對這 100 個 NeRF 的模型做 Grid query,從而獲取一個 Density Grid,其實就是一堆規則的點,可以使用 3D 卷積,從而轉換為 Feature Grid. 對 Feature Grid 做 volume rendering 就能渲染出各個視角的語義圖像了。下面是 NeSF 的流程圖。

圖 4 NeSF流程圖 NeSF 的泛化性從 demo 來看還是不錯的,但是這樣的工作顯然不是我們可以玩的 (訓練 100 個 NeRF), 你幾乎不用猜都知道是哪里出的工作。 這也就引出了 NeRF 的許多痛點,印象里第四講嘉賓在講 NeRF in the wild 和 Ha-NeRF 的時候說,每次實驗要 4 張V100 跑2天。因此不論是推理還是訓練,加速工作都顯得尤為重要,對語義 NeRF 相關的工作更是如此,因為目前的加速工作大都傾向于擺脫神經網絡。 動態場景的 NeRF 也有一些工作,但是是否一樣能像 Semantic NeRF 一樣,很輕松地 work 呢?其實能引發的問題還是挺多的。 評估一項工作的 novelty 的其中一項指標就是看這篇工作挖了多少坑,能啟發多少后續工作,Semantic NeRF 就是這樣的一篇工作。如果你看懂這個系列的工作,推薦大家立刻去看 panoptic NeRF 相關的工作。
審核編輯 :李倩
-
3D
+關注
關注
9文章
2952瀏覽量
109445 -
網絡結構
+關注
關注
0文章
48瀏覽量
11468
原文標題:基于NeRF的三維場景重建和理解
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
怎樣去設計一種基于RGB-D相機的三維重建無序抓取系統?
如何去開發一款基于RGB-D相機與機械臂的三維重建無序抓取系統
無人機三維建模的信息
一種新穎實用的基于視覺導航的三維重建算法
基于FPGA的醫學圖像三維重建系統設計與實現
基于非量測相片的三維模型重建
如何使用單目視覺進行高精度三維場景重建技術研究
NVIDIA Omniverse平臺助力三維重建服務協同發展
深度學習背景下的圖像三維重建技術進展綜述
NerfingMVS:引導優化神經輻射場實現室內多視角三維重建
從多視角圖像做三維場景重建 (CVPR'22 Oral)
三維重建:從入門到入土

如何實現整個三維重建過程

全面總結動態NeRF






 工商網監
工商網監
評論