 汽車電子架構和CAN網絡基礎
汽車電子架構和CAN網絡基礎
作者 |李偉上海控安安全測評中心安全測評部總監
來源 |鑒源實驗室
01汽車電子的分類和組成
汽車電子是車身電子控制裝置和車載電子控制裝置的總稱。
a)車身電子控制裝置主要包括:發動機控制系統、底盤控制系統和車身電子控制系統等,這三類是汽車傳統的電子領域三大模塊,常被稱為動力、底盤和車身,我們通常談及的汽車電子以及汽車電子研發一般也是指這三個模塊內的電子零部件,同時也是汽車電子零部件各大傳統巨頭占據強大技術優勢的領域,供應商如博世、大陸、法雷奧、安波福、偉世通等。汽車電子控制裝置一般是指參與實現車輛啟動及安全運行直接相關的那部分汽車電子裝置,如發動機電子控制系統、燃油噴射控制系統、底盤電子控制系統、照明及燈光信號系統、ABS、ESP等等。
b)
車載汽車電子裝置,是在汽車環境下能夠獨立使用的電子裝置,它和汽車本身駕駛屬性并無直接關系。由于汽車已有100多年的發展歷史,車身電子部分發展日趨成熟,而車載電子發展時間相對較短,且賦予了汽車許多其他功能,近年來得到飛速發展,國內零部件廠商在此領域占有一定優勢,供應商如斑馬智行、慧翰微電子、商湯科技等等,車載電子有車載冰箱、導航系統、影音娛樂系統、上網設備等。
1.1汽車電子的發展階段
第一個發展階段,1971年以前。汽車上開始出現比較簡單的電子控制設備,如電子閃光器、電子喇叭、間歇雨刮裝置、汽車收音機、數字時鐘、交流發電機等。
第二個發展階段,1974~1982年。此階段的標準是車載電子出現集成電路和16位以下的微處理器。主要包括自動門鎖、自動燈光系統、高速警告系統、撞車預警傳感器等。最具代表性的是電子汽油噴射技術和ABS技術的發展成熟,電子控制器控制機械功能在部分零部件上逐步成熟,這不意味著所有零部件上都是非常成功的,在此階段機械與電器的融合總體并不成熟。
第三個發展階段,1982~1990年。微電腦在汽車上的應用逐步可靠和成熟,開始出現向智能化方向發展的趨勢。如胎壓控制、電子道路監視器、加熱擋風玻璃、倒車示警、自動后視鏡等。
第四個發展階段,從2005年至今。以自動防撞系統、動力優化系統、自動駕駛、導航技術為代表,標志性技術高級駕駛輔助的智能化汽車的出現。
02汽車人的新革命 電子架構
2.1 汽車電子架構產生的背景
這次的故事是發生在梅賽德斯奔馳。2000年梅賽德斯奔馳技術有限公司在C級車開發時,面臨一個問題:那就是電子電器越來越多,系統復雜性越來越高,如何將所有設備連接起來?我們都知道兩兩互聯時,連線的個數是n(n-1)/2。新增零部件越來越多,原有的各系統通訊互聯和開發方式的鏈路、成本、信號干擾將是原方式下無法解決的問題。結果是經過一系列的論證操作,最終決定推倒重構,重新設計整車電子電氣,從根本解決問題。1年后該款車型電子電氣總體設計完成,同步發布的E/E Analyse軟件也應用于電子電氣架構設計。
2.2 電子架構的技術發展劃分
博世集團2017年在一場行業內會議上分享的汽車電子電氣架構發展趨勢圖得到了業內的廣泛認可,并逐漸成為了發展方向的標準指導,被大家廣為引用。整個發展階段被劃分成立了6個步驟:
Modular模塊化階段:每功能ECU化設計;
Integration功能集成階段;
Centralization中央域控制器階段:中央域控集中管理ECU;
Domain Fusion跨域融合階段:中央域控制器合并整合;
Vehicle Computer & Zone ECUs行車電腦和區域控制器:行車電腦集中管理,部分區域ECU獨立管理;
Vehicle Cloud Conputing車載云計算階段:車載功能云端計算。
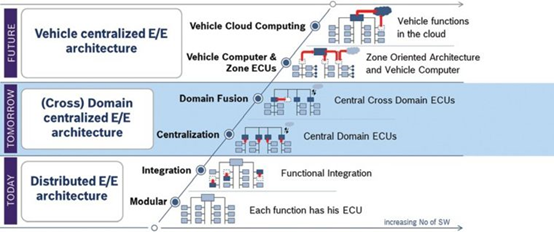
圖1 汽車電子電氣架構發展趨勢圖
目前行業主流所處的階段為1階段,即模塊化階段。同時也有部分廠商和車型出現了2階段功能集成的車型量產。這部分廠商就是我們通常所說的以特斯拉為首的整車新勢力。在汽車行業,他們在傳統領域內無法跟那些壟斷性的巨頭相抗衡,只能通過立足未來的方式來降維跟傳統企業形成競爭。這也是我們在這些車企的新車型上看到引入新的架構、新的技術和嘗試。
隨著車載以太網技術的加持,新興車企在2階段技術上遇到的問題遠比我們想象的要小,遇到的阻力主要來源于市場的檢驗(可靠性和質量方面),以及傳統車企的抵制和阻撓。
當車載以太網在車載通訊日趨成熟的時候,架構發展向3階段演進在技術上幾乎不存在難度,正常的零部件研發積累足夠形成跨代發展的所需。3階段和4階段的區別也只是設計上通訊方式不一致,導致產品設計的不同。在通訊領域這種區別的技術問題早已解決,技術成熟發展了好多年,這可能跟博世的工程師在設計此圖時謹慎考慮有一定關系。
整個架構中目前技術上的最大難點集中在了5階段和6階段,一個是中央行車電腦,另外一個是云計算中心。中央行車電腦的問題是目前我們所知的算力足夠的主流處理器在車載環境下或者類似場景下沒有任何應用,換句話說就是沒有針對車載環境專門設計的高算力處理器和操作系統,這也會隨著市場需求的發展逐步解決。云計算中心的問題是算力足夠,但是車端和云端的通訊問題,數據傳輸響應和可靠性如何得到保證。
2.3發展趨勢
行業內很多伙伴發表了一些發展趨勢的言論,作者也在行業內,也因興趣原因觀察了許久,總結自己經驗斗膽發表下自己關于汽車電子和行業的一些趨勢看法,如有不同意見或引起不適敬請見諒。
最近這五年的時間段內,汽車電子的以驚人的速度爆發性的進行著發展。新能源汽車的蓬勃發展在特斯拉為首的電動汽車帶動下,撬動著傳統汽車的主導地位,我們在近期的車輛銷售排行榜上可以看到前十里面有多款新能源汽車了。在汽車圈內很有可能發生當初蘋果取代諾基亞的劃時代事件,汽車電子大體呈現以下的發展趨勢。
傳統的燃油車市場趨向飽和,以節能減排、行業輿論、國家倡導和個人降低使用成本為目的,充電汽車、混合動力汽車增長強勁。
電動汽車等新能源汽車推動汽車電子快速發展,帶動汽車電子產品的快速更新迭代,同時汽車電子在整車成本中的占比不斷升高,部分電動汽車車型中電子產品占成本比例可能比同級別傳統汽車高出一倍左右,并且繼續增加。
軟件定義汽車,這將不再是口號,軟件將成為汽車競爭的關鍵優勢。汽車領域零部件供應商的細分化,導致圈子內硬件系統和解決方案的共享和開放性。單個車企或車型不可能獨占特有的零部件硬件,掌握軟件開發的整車廠會掌握軟件功能的獨有性。軟件將逐步成為車輛功能區別的標志。通過軟件定義汽車不再是空話,軟件將逐步成為車廠核心。
汽車開放系統架構將持續影響深遠。Google開放了Android,在手機系統中和蘋果聯手控制了移動設備的操作系統領域。基于通用化、模塊化、快速研發的考慮,汽車開放式系統架構目前高速在不同廠商中發展,這很可能變成汽車領域內的Android,并且沒有汽車領域內的蘋果,他可能會在汽車領域內一家獨大。
汽車行業內特有的整車廠和零部件供應商的結構,導致全球性的巨頭博士、大陸等在行業內形成反向的對主機廠的一定制約性,他們在傳統的動力、車身、底盤領域的壟斷性優勢讓新興的廠商短時間內難以立足,且難以形成商業規模導致無法生存,這也是傳統零部件廠商利益利潤最大化,技術迭代緩慢等招人詬病的原因之一,也正是這點讓新興企業選擇在車載電子這塊傳統巨頭不重視的領域大力投入且不斷發起挑戰的原因。
以特斯拉為首的新興企業在車載電子的迅速發展,階段性取得一定利潤,且在年輕人中逐步引導汽車消費思維,讓傳統廠商感受到一定危機,傳統巨頭也會向車載電子領域發展滲透。新興企業也會立足車載電子,向車身電子發起挑戰。根本解決一個問題的方法通常跟引起問題的原因不在一個領域,通常引入另一個維度的方法降維這個問題,因此新興企業的挑戰立足點應該是站在汽車電子架構的未來發展方向上,而不是跟傳統巨頭一樣來拼當前ECU的解決方案。但是他們所選擇的立足點是否能代表未來方向目前沒有塵埃落定,只是在用戶功能領域引起了不錯的反響。
車載通訊及車載娛樂系統升級(FOTA和SOTA)的迅速普及,車載電子的趨于同質化,以及車身電子和車載電子軟件系統的迭代更新速度差異,導致車廠在吸引消費者時,將加大對車載電子及軟件的重視。
上述的整車趨于同質化,零部件廠商發展方向相互取長補短。我們似乎又看到了一個模子里出來的主機廠和零部件廠,這樣所有廠商的利潤會趨于降低,如何保證利潤會是所有廠家的苦惱,而前面提到根本解決一個問題的方法通常跟引起問題的原因不在一個領域,通常引入另一個維度的方法降維這個問題,開源節流提高利潤,我們說了開源的方向在未來廠家趨向同質化,節流這塊一樣需要有突破。傳統的汽車和零部件研發方式已經沿用很久了,大家也都意識到自己零部件研發的通用性能有效降低成本,AUTOSAR這些體系的建立是為了不同廠商之間的快速對接,但是零部件廠商內部如何通用化絕對是一個待研究領域,新興企業如果掌握了同類型零部件內部通用的研發手段,將極大提高業內的話語權和生存能力,因為同樣一個零部件賣1000元,我內部通用化研發攤薄成本是300,業內平均成本是700,那多出來的部分就是廠家話語權的籌碼。所以我們看到了AUTOSAR這種在不同廠商間的技術體系迅速發展并成為趨勢,未來也一定會看到某個廠商內部建立的以大幅降低研發成本的設備通用化研發體系出現。
03CAN 網絡
3.1CAN網絡的重要性
之所以把CAN網絡接著汽車電子后面就跟大家介紹,是因為CAN網絡很重要。我們都知道上層技術的發展,如整體的上層技術路線、技術演進方向等等戰略層面的技術變革都需要底層很多技術的成熟和積累才能實現,前文介紹電子架構誕生時講過ECU的互聯,那是屬于上層的演進,而CAN網絡技術則是支持這些技術變革的底層基石。從CAN網絡誕生直至今日,一直是ECU通訊互聯的方式。哪怕現在隨著電子架構的演進,以太網架構的引入,目前市場上以及車企研發中的所有車型,CAN網絡也是占主要地位,系統中CAN和以太網同時并存,且開發的模式幾乎都是先基于CAN網絡,然后向以太網移植。CAN網絡把車上所有電子零部件連接在了一起,它是零部件研發中重要適配功能,整車的各種上層功能,也基于CAN網絡的通訊得以在單個及多個零部件之間實現。CAN網絡主管著整車的通訊。
3.2 CAN網絡的誕生和發展階段
CAN網絡從上世紀80年代誕生發展至今,總共經歷了5個關鍵階段。
a)1983年,德國的Bosch公司開發設計了CAN總線協議;
b)1987年,第一塊CAN控制器芯片由Intel公司設計成功;
c)1990年,第一輛應用CAN總線的量產車Mercedes S-Class出現;
d)1991年,CAN2.0發布;
e)
1993年,CAN成為國際標準ISO 11898(高速應用) 和 ISO11519(低速應用)。
3.3 CAN網絡的組成
CAN總線主要由四部分組成:導線、控制器、收發器和終端電阻。
a)CAN協議棧的通訊物理鏈路為兩根普通銅芯雙絞線;
b)CAN協議棧的控制器用于對收到和發送的信號進行處理。接收收發器的信號處理后送入MCU,接收MCU送入信號處理后發送給收發器;
c)CAN協議棧的收發器用于接受和發送信號。將網絡信號接收發送給控制器處理,將控制器處理好的信號發送到網絡;
d)
電阻的作用是過濾CAN總線信號產生變化電壓的反射,為120Ω(高速CAN)。若無終端電阻,控制單元的信號無效。需要注意的是在整車電子的設計解決方案中,如果整車統一設計了網絡終端電阻,那ECU段無需再設計;如果ECU保留了終端電阻,那在整車統一電阻箱中就不能再配置電阻。二者只能選其一。在硬件研發階段,如果SOR未標注,則必須跟項目相關DRE和VSE工程師進行確認。
3.4 CAN網絡特點
a)CAN網絡數據通信沒有主從之分,任意一個節點可以向任何其他(一個或多個)節點發起數據通信,靠各個節點信息優先級先后順序來決定通信次序;
b)多個節點同時發起通信時,低優先級節點的避讓,不會對通信線路造成擁塞;
c)最大通信距離可達10KM(此時速率低于5Kbps),通訊速率可達到1Mbps(此時通信距離小于40M);
d)
CAN總線經過多年的發展,可靠性非常高,也是以太網段時間無法取代CAN網絡的原因之一。
3.5 CAN網絡特點
CAN網絡是一種復合的類星型網絡,為什么說是類星型網絡而不是星型網絡后面會細說。因此在CAN網絡中也存在一個網關,在傳統的燃油車,或者現在一大批的車型當中,由BCM(車身控制器)來作為網關, 由于近幾年新能源車的不斷發展,BCM作為網關而集成的其他功能越來越多,因此很多廠商將這個“網關”的名字進行了變更,如IBDU、ICGM、中央行車電腦等等,大家看到名字跟我文中寫的不一樣時不用懷疑是否是文章寫錯了,這只是各個廠商名字的命名不一樣。所以現在車輛當中的“網關”很多是由BCM逐漸集成其他功能,慢慢演變而來。
CAN網絡總線由2根銅芯雙絞線構成,一根can_high,一根can_low。類似通訊網絡,在企業通訊網絡中我們根據區域不同、部門不同等等將網絡劃分為不同的網段進行管理。在CAN網絡中電子架構部門會根據整車電子零部件的不同使用或代表的歸屬屬性進行劃分,不同的劃分我們叫做CAN網絡域。同理我們上文提到的車身電子三大塊,在網絡中也是同樣的劃分,PT CAN為動力CAN、CH CAN為底盤CAN、Body CAN為車身CAN。這3個域適用于所有廠商所有商用車型。另外還有娛樂系統的Info CAN,Tbox車輛通訊出口的Diag CAN診斷CAN。除此之外電子架構會根據車型實際ECU進行自定義的網絡域劃分,在新研發的新能源車型中,CAN網絡域的個數可以到達15個。電子架構組會定期發布整車CAN網絡車架圖,研發小伙伴需要定期同步,也可以從這個車架圖中找到自身零部件所在域位置,以及其他通網絡域的設備,是否有兩兩硬線互聯的情況,如有直接互聯使用何種連接(USB、純硬線),這也是本章節前我提到的CAN網絡是類星型網絡的原因。在星型網絡中通常不存在兩兩互聯的情況,星型網絡中多出兩兩直接互聯情況,要不是錯誤連接導致環路,要不就是備用冗余鏈路設計。
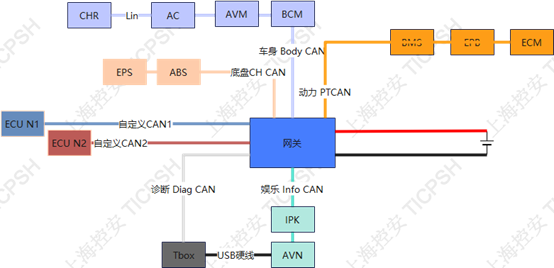
圖2 車輛網絡車架簡圖
a)PT CAN (PowerTrain CAN ) 動力總成CAN總線,顧名思義負責車輛動力系統,是整車所有CAN網絡信號中優先級最高,信號傳輸速率最快的一條CAN總線。
PT CAN總線上一般有以下ECU:
·BMS ( Battery Management System ) 電池管理系統
·ECM ( Engine Control Module ) 發動機控制模塊
·EPB ( Electronic Park Brake ) 電子駐車系統
b)CH CAN (Chassis CAN) 底盤控制CAN總線,車輛底盤控制整車轉向、制動等,功能安全等級要求較高。
底盤CAN總線上一般有以下ECU:
·ABS ( Antilock Brake System ) 防抱死制動系統
·ESP(Electronic Stability Program)車身電子穩定系統
·EPS(Electric Power Steering)電子轉向助力系統
c)Body CAN車身控制總線,車身CAN通常連接空調等輔助設備,網絡信號優先級相對上面兩個網絡低。
Body CAN總線上一般有以下ECU:
·BCM(Body Control Module) 天窗, 車窗, 霧燈, 轉向燈, 雨刮等
·TPMS(Tire Pressure Monitoring System) 胎壓監控系統
d)Info CAN ( Infomercial CAN ) 娛樂系統總線,通常車載娛樂主機和車輛駕駛座儀表連接在娛樂CAN,因此通訊優先級也是較低。
Info CAN 總線上一般有以下ECU:
·AVN( Audio& Video Network) 車載娛樂系統,也有叫IVN等不同縮寫的
·IPK(Instrument Pack) 中控儀表臺
e)DiagCAN ( Diagnose CAN ) 診斷CAN
DiagCAN總線主要提供診斷功能,通常只有一個ECU:
·Tbox(Telematics BOX)
參考文獻
[1] 車電子技術發展經歷了哪三個階段?
[2] 科普中國-汽車電子.
[3] 汽車電子電氣架構的起源是什么?
[4] 汽車CAN總線入門.
審核編輯黃宇
-
CAN
+關注
關注
57文章
2888瀏覽量
466744 -
汽車
+關注
關注
14文章
3798瀏覽量
39218
發布評論請先 登錄
汽車電子CAN總線網絡與標準
汽車電子與CAN總線-汽車車身網絡系統
【下載】《汽車CAN總線系統原理設計與應用》——車載網絡系統研究參考資料
汽車CAN總線系統原理、設計與應用
CAN總線調度算法在汽車電子控制網絡中有哪些應用?
labview汽車電子通用測試程序架構,CAN通訊上位機
汽車區域架構優勢匯總
分區電子電氣架構如何支持軟件定義汽車
汽車網絡架構是什么意思
恩智浦首席車載網絡架構師開講:CAN SIC與CAN XL芯片如何賦能未來汽車網絡?





 工商網監
工商網監
評論