 如何在電機全速范圍內獲得準確的磁鏈?
如何在電機全速范圍內獲得準確的磁鏈?
一、引言
磁鏈估計是高性能交流感應電機調速系統中的重要組成部分。而磁鏈在實際應用中一般不用傳感器直接檢測,所以現代交流電力傳動控制系統常用磁鏈估計模型來估算磁鏈。在電機運行過程中,要考慮磁飽和、溫度等干擾信號對電機參數造成偏差的影響,所以如何在電機全速范圍內獲得準確的磁鏈即提高磁鏈觀測器的參數魯棒性成為眾多學者的研究內容。
轉子磁鏈觀測器利用定子電壓、定子電流或轉子轉速信號觀測出轉子磁鏈的相位和幅值。如果轉子磁鏈的相位觀測不準,那么定子電流的勵磁分量與轉矩分量就不能實現完全的解耦,可能會造成系統的振蕩甚至不穩定。
如果觀測出轉子磁鏈的幅值偏大,會使得電機運行在弱磁狀態,減小電機的帶載能力;如果觀測出轉子磁鏈的幅值偏小,會導致過大的勵磁電流,使電機的鐵心飽和,嚴重時還會導致繞組過熱而燒壞電機。
因此決定整個矢量控制系統性能優劣的最為關鍵環節就是轉子磁鏈觀測器。
二、不同坐標系下的電流型磁鏈觀測器
根據描述磁鏈與電流的關系的磁鏈方程來計算轉子磁鏈,所得的模型叫做電流模型。電流模型可以在不同的坐標系上獲得。
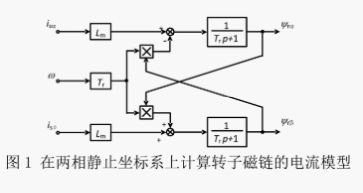
2.1 在兩相靜止坐標系下的電流模型
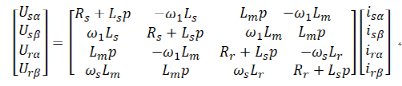
在兩相alpha、beta坐標系下的電壓方程:
由上可以得到靜止坐標系下的基于電流模型的轉子磁鏈向量表達式如下(標量形式):
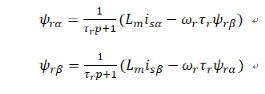
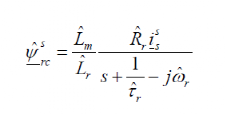
也可以表達成靜止坐標系下的復矢量形式:
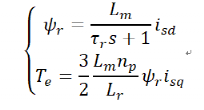
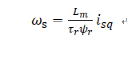
2.2 在兩相旋轉坐標系下的電流模型
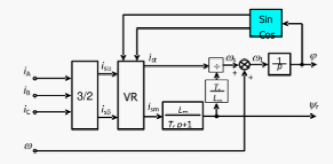
圖2 兩相旋轉坐標系下的電流型轉子磁鏈觀測器模型
相關公式如下:
三、不同坐標系下的電流型磁鏈觀測器仿真實現
3.1、靜止坐標系下的電流型磁鏈觀測器(標量形式)
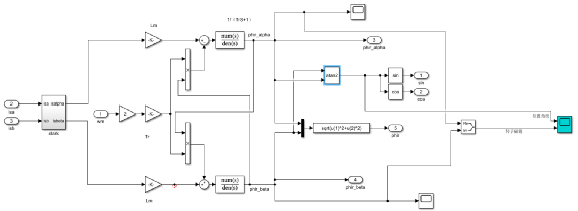
圖3 電流型磁鏈觀測器模型(標量)
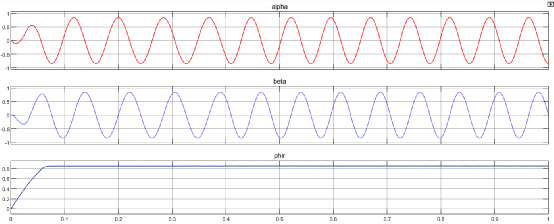
圖4 波形變化情況
3.2、靜止坐標系下的電流型磁鏈觀測器(復矢量形式)

圖5 電流型磁鏈觀測器模型(復矢量)
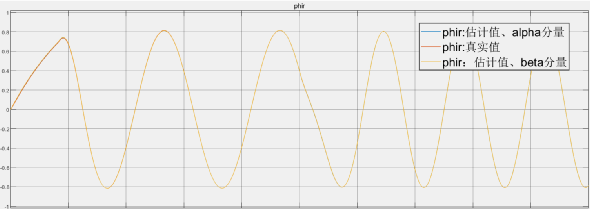
圖6 波形變化情況
3.3、旋轉坐標系下的電流型磁鏈觀測器
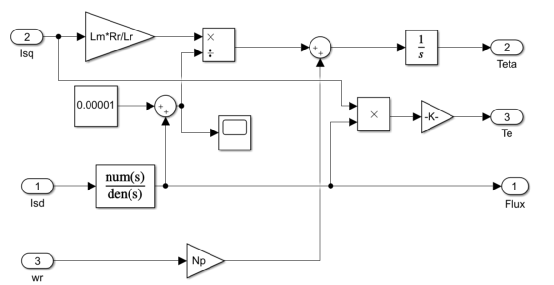
圖7 電流型磁鏈觀測器模型
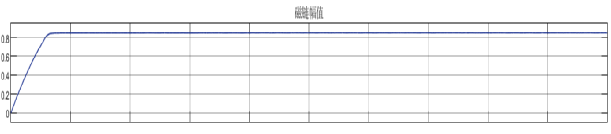
圖8 波形變化情況
審核編輯:劉清
-
傳感器
+關注
關注
2562文章
52553瀏覽量
763641 -
控制系統
+關注
關注
41文章
6752瀏覽量
111795 -
異步電機
+關注
關注
6文章
428瀏覽量
33253 -
定子電流
+關注
關注
0文章
6瀏覽量
2078 -
磁鏈觀測器
+關注
關注
0文章
9瀏覽量
1451
原文標題:基于電流型磁鏈觀測器的異步電機矢量控制學習
文章出處:【微信號:淺談電機控制,微信公眾號:淺談電機控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何獲得一個25米距離處6米寬2.5米高范圍內的坐標
如何獲得一個25米距離處6米寬2.5米高范圍內的坐標
如何獲得一個25米距離處6米寬2.5米高范圍內的坐標
永磁同步電機全速范圍轉子定位系統設計
基于二階廣義積分器的永磁同步電機定子磁鏈觀測方法
TI遠程與本地溫度傳感器準確度在+/-1℃范圍內
有沒有辦法在~50μs范圍內獲得可靠的GPTimer中斷,而不會被WiFi阻止?
全速范圍直接轉矩控制新型建模與研究
微型電機有哪些類型及可以應用在什么范圍內
基于電壓型磁鏈觀測器的異步電機矢量控制學習

基于電流型磁鏈觀測器的異步電機矢量控制學習





 工商網監
工商網監
評論