") 如何在PMSM中建立合適的坐標(biāo)系(二)
如何在PMSM中建立合適的坐標(biāo)系(二)
01兩種Park變換
當(dāng)電動機的三相繞組通以對稱的三相正弦電流時,就會產(chǎn)生合成磁動勢,它是一個在空間以w速度旋轉(zhuǎn)的空間矢量,在實際的交流電機以及系統(tǒng)分析中,可以通過Park變換將參考坐標(biāo)從旋轉(zhuǎn)電機的定子一側(cè)轉(zhuǎn)移到轉(zhuǎn)子一側(cè)的坐標(biāo)表示,包括經(jīng)典Park變換與正交Park變換。
經(jīng)典Park變換的核心思想是,在兩相靜止坐標(biāo)系變換到兩相旋轉(zhuǎn)坐標(biāo)系的過程中電流的空間合成矢量不發(fā)生變化;
正交Park變換的核心思想是,在兩相靜止坐標(biāo)系變換到兩相旋轉(zhuǎn)坐標(biāo)系的過程中磁動勢保持不變。
02在PMSM中建立合適的坐標(biāo)系
圖1-1中有兩相靜止坐標(biāo)系和以同步電機同步轉(zhuǎn)速w旋轉(zhuǎn)的坐標(biāo)系,沿靜止坐標(biāo)系方向通以兩相電流,沿旋轉(zhuǎn)坐標(biāo)系dq方向通以電流id、iq產(chǎn)生的合成電流矢量I相等。
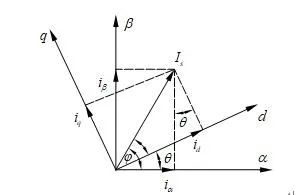
圖1-1 Park坐標(biāo)變換
03Park變換原理
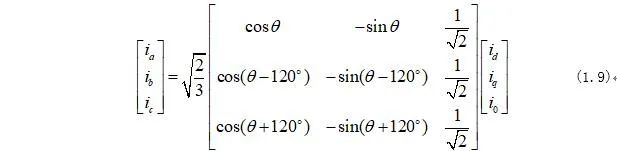
兩相靜止坐標(biāo)系和兩相同步旋轉(zhuǎn)坐標(biāo)系的各個電流存在如下關(guān)系:

寫成矩陣形式為:

式(1.2)中變換矩陣為Park矩陣的逆矩陣:

將式(1.3)代入式(1.2)可求得兩相旋轉(zhuǎn)坐標(biāo)系下各個電流的關(guān)系式為:

所以Park變換矩陣為:

04如何應(yīng)用?
如何得到永磁同步電機在兩相同步旋轉(zhuǎn)坐標(biāo)系下的電機電壓方程?
永磁同步電機的定子電壓方程在三相靜止坐標(biāo)系下為:

將式(1.6)乘以Clarke矩陣可以得到永磁同步電機在兩相靜止坐標(biāo)系下的電機電壓方程為:

同理,將式(1.7)乘以Park矩陣就可以得到永磁同步電機在兩相旋轉(zhuǎn)坐標(biāo)系下的電機電壓方程為:

05思考題
為啥永磁同步電機從三相靜止坐標(biāo)系經(jīng)過Clarke變換和Park變換后,存在兩種系數(shù)?
第一種:
第二種:

哪種是正確的? 答案留給下期解答,敬請關(guān)注!
-
電動機
+關(guān)注
關(guān)注
75文章
4151瀏覽量
98262 -
坐標(biāo)系
+關(guān)注
關(guān)注
0文章
29瀏覽量
7460 -
Park
+關(guān)注
關(guān)注
0文章
6瀏覽量
8109 -
PMSM
+關(guān)注
關(guān)注
14文章
248瀏覽量
42482 -
坐標(biāo)變換
+關(guān)注
關(guān)注
0文章
19瀏覽量
6945
發(fā)布評論請先 登錄
MATLAB建立和控制圖形窗口和坐標(biāo)系命令
vision Assitant 建立坐標(biāo)系(模板匹配)
如何建立坐標(biāo)系
A、B、C三相坐標(biāo)系中PMSM數(shù)學(xué)模型定子電壓方程
PMSM的坐標(biāo)系和數(shù)學(xué)模型
Pmsm在旋轉(zhuǎn)坐標(biāo)系的數(shù)學(xué)模型坐標(biāo)變換
坐標(biāo)系與魚雷運動參數(shù)

如何在PMSM中建立合適的坐標(biāo)系(一)
機器人坐標(biāo)系選擇指令和操作步驟

自動駕駛各個坐標(biāo)系

三坐標(biāo)如何建立坐標(biāo)系?

世界坐標(biāo)系、相機坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系之間的關(guān)系






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論