") 基于微型鐵磁機器人的微流控平臺,實現(xiàn)靈活高效的病毒檢測
基于微型鐵磁機器人的微流控平臺,實現(xiàn)靈活高效的病毒檢測
最近,在香港大學(xué)機械工程系科研助理教授林海松擔任第一作者的Nature論文中,他和合作者利用名為Ferrobot的微型鐵磁機器人,實現(xiàn)了自動化的快速群組病毒檢測,可使檢測試劑成本下降10至300倍。
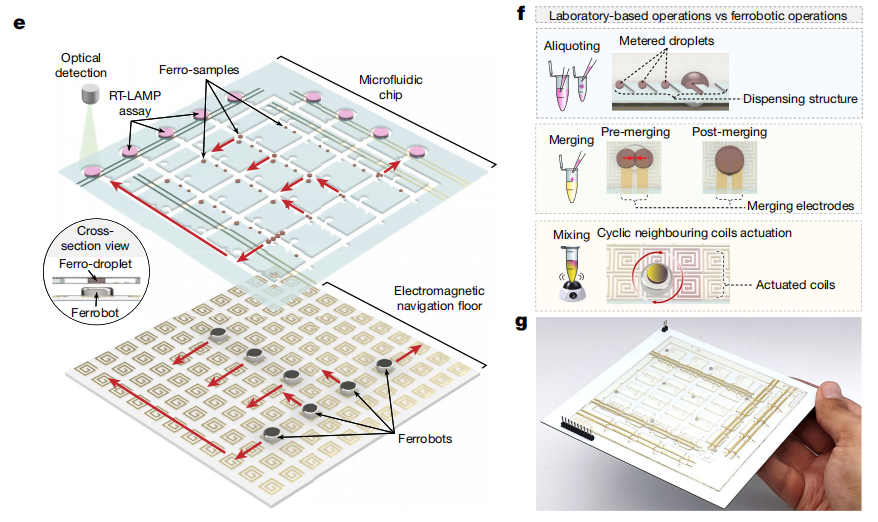
在這一技術(shù)中,10個Ferrobot微型機器人高效協(xié)作,它們攜帶著輸入的鼻咽拭子樣品,在手掌大小的平臺上進行自動化運輸、分離、分類、混合等操作,通過集成核酸擴增檢測試劑,來對新冠病毒的遺傳物質(zhì)進行群組篩查,從而對病毒感染情況進行診斷。
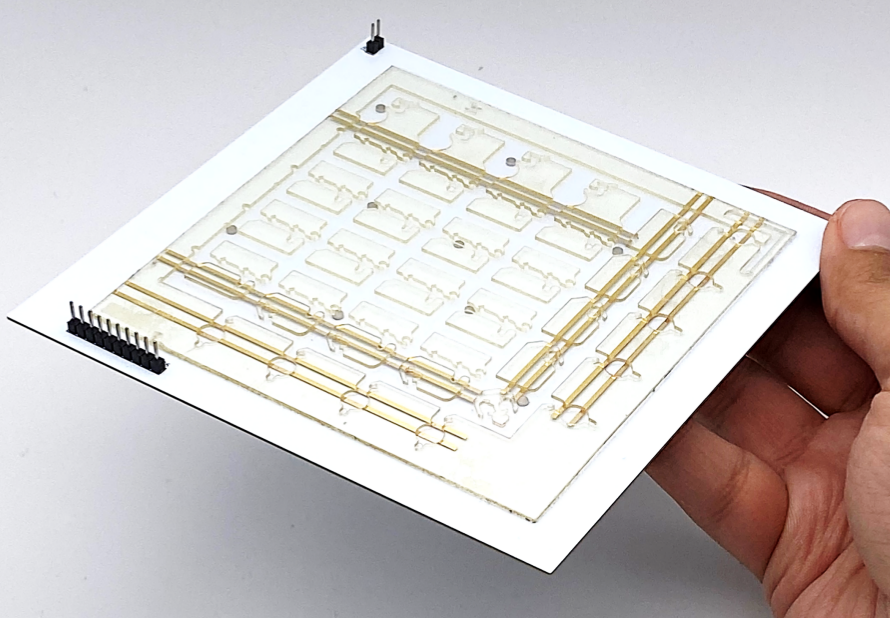
圖 | 只有手掌大小的Ferrobot檢測平臺(來源:Nature)
其與實驗室檢測的聚合酶鏈式反應(yīng)測試法(即大家熟悉的核酸檢測),所得到的結(jié)果一致。同時,F(xiàn)errobot平臺的制造成本既廉價、又簡單,可以實現(xiàn)大規(guī)模生產(chǎn)和部署。整個系統(tǒng)的運行可靠性,遠超諸多同類型的流體操縱技術(shù),并在800多萬次自動化測試中得到了證明。
同時,它的另一突破在于:利用基于患病率的適應(yīng)性檢測算法——平方矩陣方案,進行群組篩查。在同時測試16個樣品的前提下,相比單獨測試的方法,該技術(shù)的微量化測試與群組篩查設(shè)計的特點,能讓化學(xué)試劑的消耗量降低300倍。
如果群組測試結(jié)果為陽性,后續(xù)的篩查測試將繼續(xù)由該平臺自動進行,直到識別出具體的陽性樣本。測試全程只需30到60分鐘,具體時長取決于是否有陽性樣本。
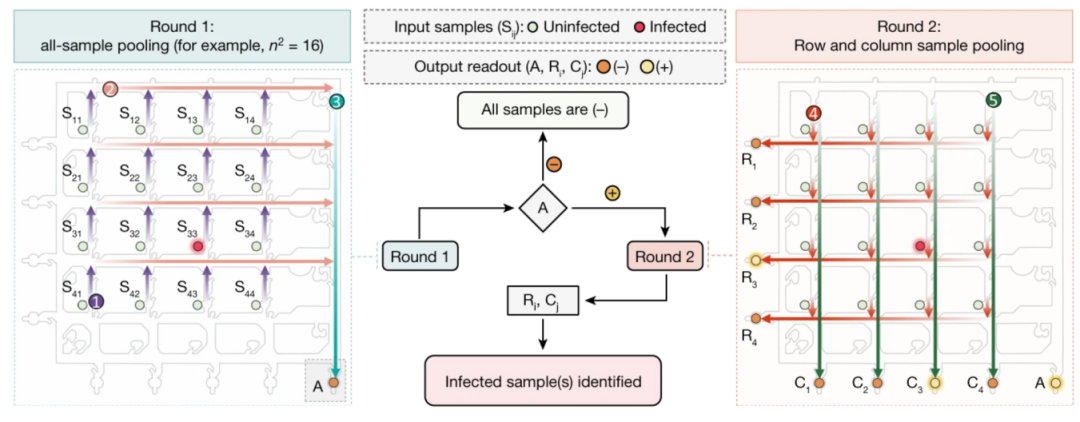
圖 | 基于患病率的適應(yīng)性平方矩陣檢測算法及硬件執(zhí)行方案,可對16個樣本進行多輪全自動群組篩查(來源:Nature)
此外,只有手掌大小的便攜式平臺利用可編程的自動化操縱,可以避免繁瑣的人工操作,從而縮短測試周期。在自動化分析中,無需過多的專業(yè)測試人員,就能在大規(guī)模測試點和社區(qū)實現(xiàn)自主檢測。
舉例來說,幾十個檢測組件就有望實現(xiàn)對一所大學(xué)進行快速病毒檢測。同時,這款手持式一體化實驗平臺,可以讓病毒檢測脫離實驗室的局限性,從而實現(xiàn)檢測的社區(qū)化普及,進而最大限度地利用資源,降低物資和人力的使用量,借此減少測試成本,同時還能有效遏制疫情蔓延。
也就是說,F(xiàn)errobot平臺能對新冠病毒進行快速、廉價的自動化檢測,而且無需繁瑣的樣品處理和復(fù)雜的人員培訓(xùn)。在芯片中,樣本會被進行自動化處理分析,從而減少對于實驗室規(guī)模集中檢測的依賴,可以輕易地在辦公樓、學(xué)校、機場甚至公共交通上部署病毒測試。
而這種無需實驗室分析的方法,在便攜快速的同時還能保障檢測的精準度。此外,基于微流控的測試對試劑的消耗較少,可以極大地降低測試所需成本。
(來源:Nature)
事實上,在每一種新型病毒爆發(fā)的初期,對病毒的追蹤速度直接關(guān)系到疫情的傳播速度,測試方法的較長研發(fā)周期,也會直接導(dǎo)致疫情的快速蔓延。
而Ferrobot平臺能對新病毒的特定核酸信息進行“身份識別”,從而實現(xiàn)快速部署,借此建立準確的病毒檢測方法,進而及時控制傳播鏈。
此外,對于人體生物液中的多種生物標記,其也具備實時分析的潛力。除能對病毒性疾病進行檢測追蹤,還可以集成多種類型的生物試劑和傳感器,幫助人們更好地進行健康管理,以及協(xié)助醫(yī)生檢查患者的健康狀態(tài)。
另據(jù)悉,研究團隊也打算探索該系統(tǒng)在化學(xué)、材料領(lǐng)域的應(yīng)用。由于Ferrobot微流控芯片系統(tǒng)具備高度集成的特質(zhì),可以實現(xiàn)多種快速液體操縱,因此課題組希望借此解放實驗室中人員的雙手,通過編程合適的反應(yīng)流程,利用微流控系統(tǒng)對反應(yīng)過程實現(xiàn)準確、安全的控制,并結(jié)合算法來快速探索未知的反應(yīng)。
當然,該平臺的應(yīng)用場景,絕不限于新冠病毒這一種病毒。過去幾十年間,包括新冠病毒在內(nèi)的多種流行病毒,頻繁且規(guī)律性的出現(xiàn)威脅著人類的健康。在控制病毒大面積爆發(fā)的過程中,及時的病毒檢測至關(guān)重要。然而,現(xiàn)有的檢測模式高度依賴實驗室設(shè)備,需要將待測樣本從各個檢測點收集、統(tǒng)計、運輸?shù)教囟▽嶒炇疫M行分析,這會消耗大量的人力財力,并且耗時也比較長。因此,我們亟需一款便攜、廉價的檢測設(shè)備。
據(jù)介紹,F(xiàn)errobot檢測平臺的研發(fā),貫穿林海松的整個博士生涯。在此次論文發(fā)表之前,他和當時所在的團隊,已經(jīng)積累了相對充足的經(jīng)驗,并將階段性的技術(shù)整理為論文,以封面形式發(fā)表于Science Robotics。
此后,研究人員一直在尋找和發(fā)掘更多的應(yīng)用場景,以將該技術(shù)最大化地用于日常生活。2020年,關(guān)于此次Nature論文的課題正式立項。
但在當時,他們還迷茫于無法明確此類技術(shù)的最優(yōu)應(yīng)用價值。隨后新冠疫情爆發(fā),各領(lǐng)域?qū)<壹娂娂尤肟挂哧犖椤W鳛橄嚓P(guān)領(lǐng)域的科研人員,該團隊當然也不例外。
而對于已經(jīng)初步研發(fā)完畢的Ferrobot平臺,課題組深諳其在生化檢測上的優(yōu)勢,并立即意識到它將給病毒檢測帶來實際幫助。伴隨著疫情全球化的緊迫之感,他們開啟了為期兩年的研究。
期間,一個具有革新意義的創(chuàng)意,讓該研究迎來了真正的關(guān)鍵節(jié)點。正如前面說到,研究團隊的最初目標在于實現(xiàn)病毒個體樣本的檢測自動化。不過,這一目標在2021年初已被攻克。所以,他們并不滿足于當時的自動化檢測效率,總覺得Ferrobot的自動化程度并沒有完全發(fā)揮出來。
這時他們注意到,中國已經(jīng)開始使用核酸混檢方式。在人工混檢的背后,人力、物力的消耗不容小覷。一旦發(fā)現(xiàn)陽性,就要追溯同一混檢試管中的所有被檢人員,進行一一重新排查。
這讓研究人員意識到,病毒檢測需要根據(jù)當?shù)夭《緜鞑コ潭龋瑏碓O(shè)計最優(yōu)的混檢篩查方法,而且最好是高自動化的。而高適應(yīng)性的Ferrobot平臺,是最有希望對該瓶頸進行突破的手段之一。
接下來的一年多里,核心成員們進行著循環(huán)討論、實驗和分析,這種一周7天、早7晚11的工作模式,大大加速了實驗進程,讓微流控芯片的設(shè)計及優(yōu)化、電路程序優(yōu)化、生物化學(xué)試劑兼容性等核心問題得以解決。
(來源:Nature)
而作為一款病毒檢測平臺,自然要對真實樣本進行大規(guī)模實驗。課題組與加州大學(xué)洛杉磯分校(UCLA,University of California, Los Angeles)醫(yī)學(xué)院、以及其他實驗室進行協(xié)調(diào)和求助,借此獲得大量的真實病毒樣本,最終對Ferrobot平臺進行了臨床驗證。
結(jié)果顯示,對比日常的核酸檢測結(jié)果,其靈敏度和準確性基本沒有差別。但是,F(xiàn)errobot平臺自動化微流體平臺的特點,能讓人力和物力的成本下降2-3個數(shù)量級。
研究期間,在第一次對病毒個體樣本實現(xiàn)自動化檢測時,擔任此次論文共同一作的余文卓,小心翼翼地從通風(fēng)櫥里把芯片拿出來,當大家看到檢測結(jié)果和預(yù)期結(jié)果一致時,那是科研人員最美好的瞬間。
后來,當看到準確率非常接近現(xiàn)有標準方法時,整個團隊更加興奮,因為這意味著Ferrobot平臺兼具全自動化和準確性高的優(yōu)勢。
科研有時就像“升級打怪”,總有更難的溝壑要越過。在個體檢測成功之后,課題組陷入了持續(xù)幾周的迷茫期——苦惱于如何對病毒檢測效率進行突破性提升。
為此,課題組向多個科研團隊“取經(jīng)”,以了解關(guān)于病毒檢測的更多需求。在一次晚飯閑聊時,有人偶然提到了前文的混檢模式。
于是,林海松和余文卓開啟了一場激烈討論:如何利用Ferrobot平臺來優(yōu)化群組檢測效率。最終他們意識到:人工混檢中的很多問題,都有望通過該平臺達到更高的效率。
為此,他們決定采用基于患病率的適應(yīng)性群組篩查算法:平方矩陣方案。林海松說:“記得那晚每個人都非常激動,對于項目的最終目標‘摩拳擦掌’。哪怕現(xiàn)在想到當時的情境,都會熱血沸騰。”
而在實現(xiàn)對于群組篩查實驗的全自動化之后,當?shù)谝淮卧趯嶒炇铱吹綔y試結(jié)果真實地呈現(xiàn)在大家眼前時。“那一刻我們一片歡騰,也為所有組員全身心投入的這段艱辛攻堅時期,畫上了圓滿的句號。”林海松表示。
最終,相關(guān)論文以“Ferrobotic swarms enable accessible and adaptable automated viral testing”為題發(fā)表在Nature上。
林海松為第一作者和共同一作,UCLA電子與計算機工程系博士研究生余文卓、基亞拉什·薩貝特(Kiarash Sabet)是共同一作。通訊作者為UCLA電子與計算機工程系副教授薩姆·埃馬米內(nèi)賈德(Sam Emaminejad)和生物工程系教授迪諾·迪·卡洛(Dino Di Carlo)。
圖 | 相關(guān)論文(來源:Nature)
如今,林海松已經(jīng)離開美國,也離開了當時的團隊,目前任職于香港大學(xué),但基于Ferrobot平臺的跨國合作仍會繼續(xù)。
在科研層面,他們?nèi)栽诨贔errobot平臺尋找一些關(guān)鍵的生物化學(xué)標記物,希望能對更多類型的人體健康狀況進行評估,甚至對潛在疾病進行預(yù)測。
在成果轉(zhuǎn)化層面,在由香港大學(xué)機械工程系教授岑浩璋領(lǐng)導(dǎo)的先進生物醫(yī)學(xué)研究中心(Advanced Biomedical Instrumentation Center),林海松作為相關(guān)項目負責人正嘗試把自動化生物標記的檢測技術(shù),推向更多外部實驗室、醫(yī)院、以及檢測機構(gòu)。
當然,也在嘗試推向?qū)こ0傩占遥M茏屓藗兺ㄟ^幾滴唾液或汗液,就可以在電腦旁獲取自己的健康信息。
論文鏈接:
https://doi.org/10.1038/s41586-022-05408-3
審核編輯 :李倩
-
微型機器人
+關(guān)注
關(guān)注
0文章
111瀏覽量
19819 -
微流控
+關(guān)注
關(guān)注
16文章
576瀏覽量
19694
原文標題:基于微型鐵磁機器人的微流控平臺,實現(xiàn)靈活高效的病毒檢測
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
納芯微磁傳感器技術(shù)推動人形機器人性能提升

盤點#機器人開發(fā)平臺
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】視覺實現(xiàn)的基礎(chǔ)算法的應(yīng)用
工業(yè)機器人工作站的建設(shè)意義
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發(fā)實踐
基于微型5G網(wǎng)關(guān)的石化廠區(qū)巡檢機器人應(yīng)用

【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
機器人加裝電主軸【銑削、鉆孔、打磨、去毛刺】更高效
FOC電機在機器人技術(shù)中的作用
基于磁珠操控的微流控平臺實現(xiàn)副溶血性弧菌的快速捕獲與檢測

基于漩渦湍流輔助的微流控平臺,可實現(xiàn)類精子結(jié)構(gòu)的微型機器人一步成型

高效運作的機器人背后,MT6835磁編碼IC是如何做到的?
Al大模型機器人
微型導(dǎo)軌:手術(shù)機器人的高精度“骨骼”






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論