") 如何選擇一款六軸機械臂作為入門(教育或者研究)機械臂?
如何選擇一款六軸機械臂作為入門(教育或者研究)機械臂?
未來的趨勢絕對是機器人代替人工作業(yè),機械臂首當(dāng)其沖。如今機械臂工業(yè)化已經(jīng)比較成熟,許多人都開始對機械臂感興趣,想要學(xué)習(xí)的話手里肯定得有一臺機械臂幫助學(xué)習(xí),那么選擇一款機械臂是相當(dāng)重要的一個步驟。因為機械臂的價格是十分昂貴的,相對于來說可能負(fù)擔(dān)不起一個機械臂的價格,在選擇購買的時候就要慎重決定。教育和研究型的機械臂就逐漸浮出市場,市面上有許多的桌面型機械臂,那么該如何選擇一款機械臂呢?
這里我將為大家提供兩款桌面型六軸機械臂,來比較一下我們該如何去選擇一款機械臂。
首先了解一下兩大類機械臂:工業(yè)機械臂,協(xié)作機械臂
工業(yè)機械臂:工業(yè)機械臂顧名思義就是在工廠里代替人工作業(yè)的機械臂,不需要跟人類共同工作,能夠很大程度上的降低生產(chǎn)成本,提高生產(chǎn)效率,可以代替人類去做危險工作。
協(xié)作機械臂:協(xié)作性機械臂的定義是指能夠直接與協(xié)作區(qū)域內(nèi)的人進(jìn)行交互的機械臂,也就是說,協(xié)作性機械臂和人類能夠在同崗位的區(qū)域工作。
工業(yè)機械臂的結(jié)構(gòu)大多數(shù)以中心對稱結(jié)構(gòu),協(xié)作性機械臂以UR型結(jié)構(gòu)為主。


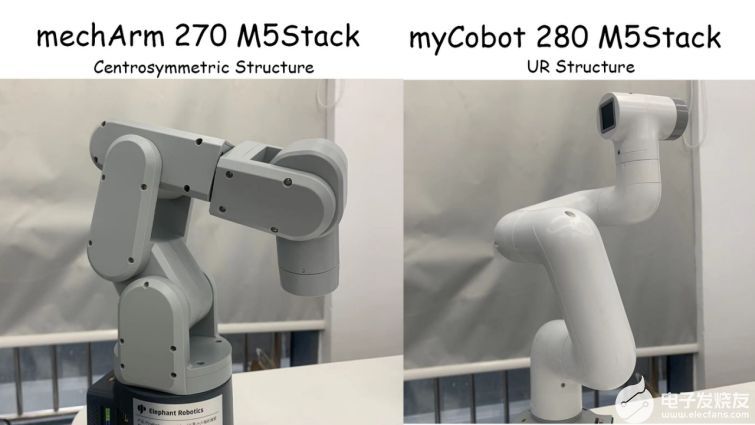
接下來將從兩款相對應(yīng)的機械臂開始展開介紹。(左圖中心對稱結(jié)構(gòu),右圖UR構(gòu)型機械臂)
介紹
myCobot 280 M5Stack:
myCobot 280 M5Stack,由M5Stack-Basic驅(qū)動的協(xié)作機器人,具有多種功能的6軸協(xié)作機器人,UR結(jié)構(gòu)。
mechArm270 M5Stack:
mechArm和myCobot一樣,也是由M5Stack-Basic驅(qū)動的6軸協(xié)作機器人,但是mecharm的結(jié)構(gòu)是中心對稱式。
功能開發(fā)介紹
兩款機械臂能做到的功能基本一樣,我就舉例一款來簡單介紹一下。
myCobot280M5Stack 可以快速構(gòu)建機械臂編程環(huán)境和了解機械臂控制邏輯。支持多種語言開發(fā),例如python,c++,c#,JavaScript等。大象機器人提供了一個快速搭建機械臂開發(fā)環(huán)境的Gitbook,里面內(nèi)容全面,從環(huán)境搭建到操控機械臂都有詳細(xì)的教程。
用ROS機器人控制系統(tǒng)展示
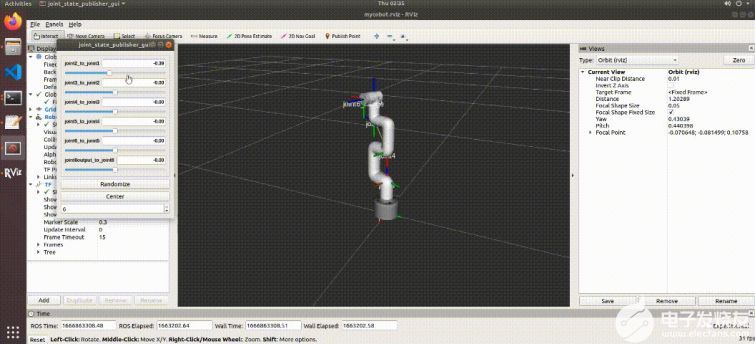
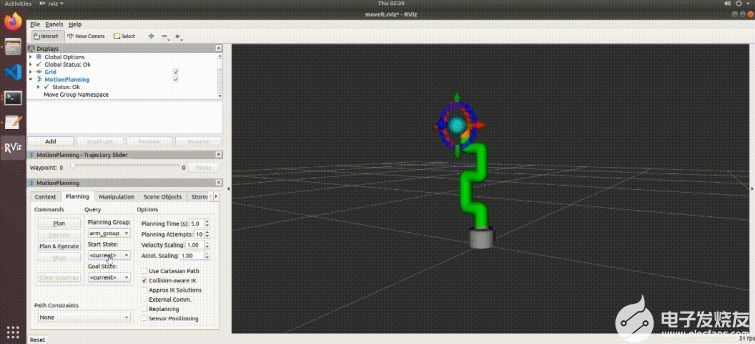
在ros中搭建真實1:1的虛擬環(huán)境,可以在ros當(dāng)中對myCobot進(jìn)行二次開發(fā)。
還有提供的人工智能套裝場景,來初步將機器視覺和機械臂運動相結(jié)合在一起。
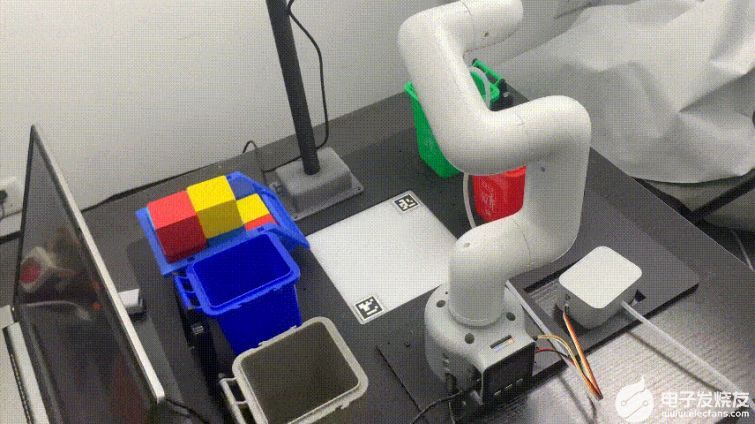
機械臂末端接口是由樂高科技接口,可以3D打印自己需要的裝置來完成開發(fā)的需求。
這款機械臂最大程度上提供了給用戶二次開發(fā)的支持,主流編程語言開發(fā),全平臺系統(tǒng)開發(fā)。可以作為剛?cè)腴T學(xué)習(xí)機械臂相關(guān)原理的最好的選擇。
前面說到mechArm和myCobot兩款的功能一樣,那么它們有什么實質(zhì)上的區(qū)別呢?
我們來看下他們的參數(shù)表。
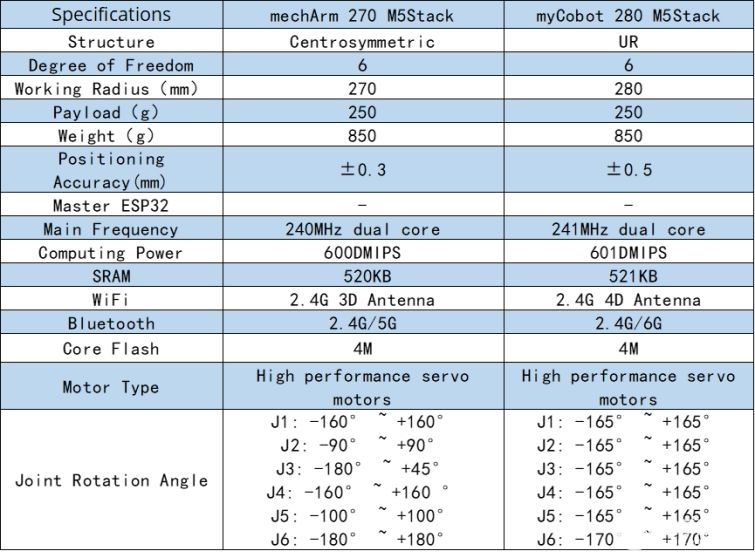
在它們的主控上以及配置幾乎相同,在工作半徑和精度上不同,這些不同的原因歸根于他們的結(jié)構(gòu)。
展開說
1外形:
中心對稱結(jié)構(gòu)的機械臂在目前是全球應(yīng)用最廣,最經(jīng)典的類型。
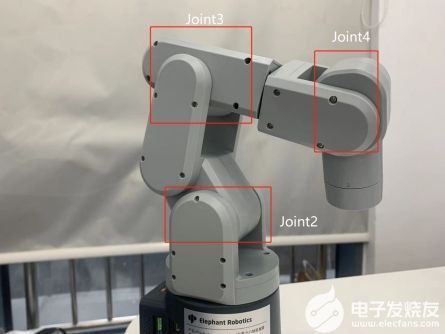
mechArm的關(guān)節(jié)2,關(guān)節(jié)3,關(guān)節(jié)4處都是雙邊支撐,能夠讓機械臂運動更加的穩(wěn)定和流暢,這也是為什么中心對稱結(jié)構(gòu)能夠延續(xù)幾十年被反復(fù)使用的主要原因。
UR結(jié)構(gòu)性的機械臂關(guān)節(jié)沒有支撐,正因為沒有支撐,它工作的范圍比較廣,能夠很靈活的運動。當(dāng)然它也是有它的弊端,在相同的條件下,UR結(jié)構(gòu)性的機械臂獲得了較大的工作范圍,沒有了支撐的機械臂,只能依靠電機來維持機械臂的穩(wěn)定。所以在機械臂運動的時候會有些偏差。
2 關(guān)節(jié)運動范圍
表格可以看出,mechArm的關(guān)節(jié)運動是受限制的
mechArm

mycobot

Summary總結(jié)
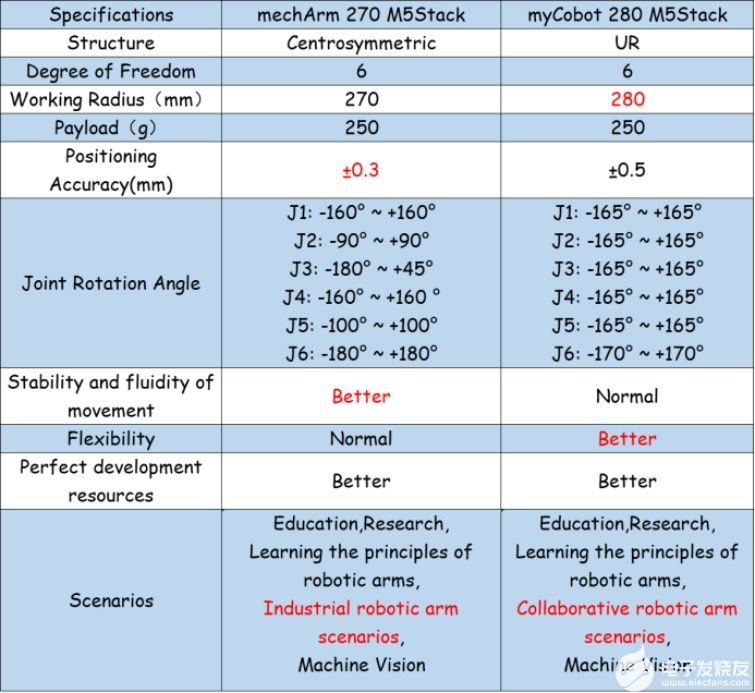
mechArm適用于工業(yè)機器人手臂方向的學(xué)習(xí),而myCobot適用于人機協(xié)作場景。
兩款機械臂都分別代表目前主流類型,各有各的好和壞。希望這篇文章能夠給你選擇一款自己的機械臂的時候能夠有所幫助。你要是還有想了解更多,歡迎在下方留言。如果你喜歡這篇文章請給我們支持點贊,你的喜歡是我們更新的動力!
審核編輯黃昊宇
-
機器人
+關(guān)注
關(guān)注
213文章
29475瀏覽量
211529 -
機械臂
+關(guān)注
關(guān)注
13文章
543瀏覽量
25216
發(fā)布評論請先 登錄
大象機器人攜手進(jìn)迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品
海康威視推出大模型機械臂防碰撞相機
專為機器人教育而設(shè)計的創(chuàng)客友好型機械臂

如何使用PLC控制myCobot 320機械臂

使用myCobot 280機械臂結(jié)合ROS2系統(tǒng)搭建機械分揀站

深度解析!RK3568 加持機械臂是如何實現(xiàn)顏色識別與抓取的?

RK3568國產(chǎn)實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
“雙保險”鎖緊機制:YM28系列連接器為機械臂提供高牢靠的大電流連接

機械臂的高效運作,連接器起關(guān)鍵作用
OrangePi AIpro應(yīng)用:機械臂應(yīng)用開發(fā)指南

工業(yè)機器人和機械臂的設(shè)計、功能和應(yīng)用有哪些區(qū)別?
奧比中光推出2.0版大模型機械臂
大象機器人開源協(xié)作機械臂機械臂接入GPT4o大模型!

國產(chǎn)Cortex-A55人工智能教學(xué)實驗箱_基于Python機械臂跳舞實驗案例分享
基于六維力傳感器的機械臂自動裝配應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論