") 目標(biāo)檢測(cè)算法有哪些 目標(biāo)檢測(cè)算法原理圖
目標(biāo)檢測(cè)算法有哪些 目標(biāo)檢測(cè)算法原理圖

目標(biāo)檢測(cè)是計(jì)算機(jī)視覺(jué)領(lǐng)域的核心問(wèn)題之一,其任務(wù)就是找出圖像中所有感興趣的目標(biāo),確定他們的類(lèi)別和位置。由于各類(lèi)不同物體有不同的外觀,姿態(tài),以及不同程度的遮擋,加上成像是光照等因素的干擾,目標(biāo)檢測(cè)一直以來(lái)是一個(gè)很有挑戰(zhàn)性的問(wèn)題。
目標(biāo)檢測(cè)算法原理
目標(biāo)檢測(cè)定義,識(shí)別圖片中有哪些物體以及物體的位置(坐標(biāo)位置)。其中,需要識(shí)別哪些物體是人為設(shè)定限制的,僅識(shí)別需要檢測(cè)的物體;物體的坐標(biāo)位置由兩種表示方法:極坐標(biāo)表示(xmin, ymin, xmax, ymax)和中心點(diǎn)坐標(biāo)表示(x_center, y_center, w, h)。
目標(biāo)檢測(cè)算法原理:清晰記住算法的識(shí)別流程,解決某些問(wèn)題用到的算法的關(guān)鍵技術(shù)點(diǎn)。
常見(jiàn)經(jīng)典目標(biāo)檢測(cè)算法
目標(biāo)檢測(cè)算法分類(lèi):
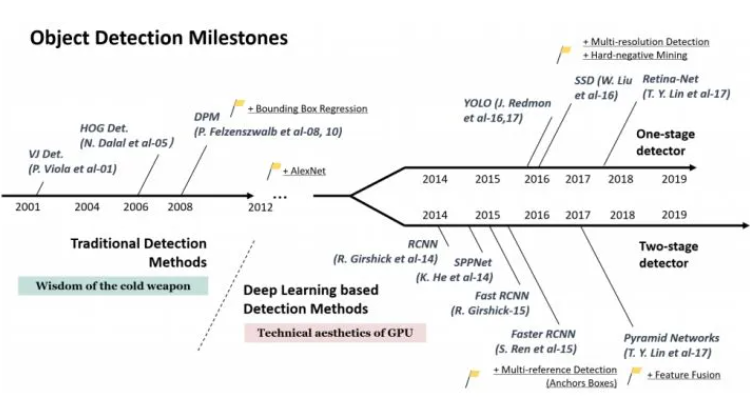
目標(biāo)檢測(cè)近年來(lái)已經(jīng)取得了很重要的進(jìn)展,主流的算法主要分為兩個(gè)類(lèi)型:
(1)two-stage方法,如R-CNN系算法,其主要思路是先通過(guò)啟發(fā)式方法(selective search)或者CNN網(wǎng)絡(luò)(RPN)產(chǎn)生一系列稀疏的候選框,然后對(duì)這些候選框進(jìn)行分類(lèi)與回歸,two-stage方法的優(yōu)勢(shì)是準(zhǔn)確度高。
(2)one-stage方法,如Yolo和SSD,其主要思路是均勻地在圖片的不同位置進(jìn)行密集抽樣,抽樣時(shí)可以采用不同尺度和長(zhǎng)寬比,然后利用CNN提取特征后直接進(jìn)行分類(lèi)與回歸,整個(gè)過(guò)程只需要一步,所以其優(yōu)勢(shì)是速度快,但是均勻的密集采樣的一個(gè)重要缺點(diǎn)是訓(xùn)練比較困難,這主要是因?yàn)檎龢颖九c負(fù)樣本(背景)極其不均衡,導(dǎo)致模型準(zhǔn)確度稍低。
目標(biāo)檢測(cè)和目標(biāo)識(shí)別的區(qū)別
目標(biāo)檢測(cè)和識(shí)別,是計(jì)算機(jī)視覺(jué)最常見(jiàn)的挑戰(zhàn)之一。
目標(biāo)檢測(cè)和識(shí)別的區(qū)別在于:目標(biāo)檢測(cè)是用來(lái)確定圖像的某個(gè)區(qū)域是否含有要識(shí)別的對(duì)象,而識(shí)別是程序識(shí)別對(duì)象的能力。識(shí)別通常只處理已檢測(cè)到對(duì)象的區(qū)域。
目標(biāo)檢測(cè)算法的發(fā)展現(xiàn)狀
目標(biāo)檢測(cè)是計(jì)算機(jī)視覺(jué)中最重要的任務(wù)之一,主要目標(biāo)是在真實(shí)場(chǎng)景或輸入圖像中檢測(cè)出特定目標(biāo)以及目標(biāo)的具體位置,并為每個(gè)檢測(cè)到的對(duì)象分配預(yù)先標(biāo)注的類(lèi)別標(biāo)簽。由于其應(yīng)用廣泛、發(fā)展迅速,近年來(lái)目標(biāo)檢測(cè)引起了巨大的關(guān)注。
基于深度學(xué)習(xí)的計(jì)算模型主要用于通用或是特定領(lǐng)域的目標(biāo)檢測(cè)。這些計(jì)算模型作為大多數(shù)目標(biāo)檢測(cè)器的骨干網(wǎng)絡(luò)(backbone),主要作用為從輸入圖像中提取特征、分割、分類(lèi)和目標(biāo)定位等。
事實(shí)上,作為圖像分析的重要方法,目標(biāo)檢測(cè)在許多計(jì)算機(jī)視覺(jué)任務(wù)中廣泛應(yīng)用,比如人臉識(shí)別、行人檢測(cè)、標(biāo)志檢測(cè)和視頻分析等方向。人臉識(shí)別的目的是檢測(cè)出圖像中存在的人臉,由于存在許多不確定的遮擋和光照變化,人臉識(shí)別在現(xiàn)階段研究中仍然是一項(xiàng)困難的任務(wù)。
-
目標(biāo)檢測(cè)
+關(guān)注
關(guān)注
0文章
225瀏覽量
16015 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5561瀏覽量
122794
發(fā)布評(píng)論請(qǐng)先 登錄
PowerPC小目標(biāo)檢測(cè)算法怎么實(shí)現(xiàn)?
求一種基于機(jī)載單通道SAR數(shù)據(jù)的地面運(yùn)動(dòng)目標(biāo)檢測(cè)算法
基于YOLOX目標(biāo)檢測(cè)算法的改進(jìn)
基于像素分類(lèi)的運(yùn)動(dòng)目標(biāo)檢測(cè)算法
基于碼本模型的運(yùn)動(dòng)目標(biāo)檢測(cè)算法

改進(jìn)的ViBe運(yùn)動(dòng)目標(biāo)檢測(cè)算法_劉春
基于深度學(xué)習(xí)的目標(biāo)檢測(cè)算法

基于多尺度融合SSD的小目標(biāo)檢測(cè)算法綜述
基于Grad-CAM與KL損失的SSD目標(biāo)檢測(cè)算法
淺談紅外弱小目標(biāo)檢測(cè)算法
快速入門(mén)自動(dòng)駕駛中目標(biāo)檢測(cè)算法

無(wú)Anchor的目標(biāo)檢測(cè)算法邊框回歸策略

基于強(qiáng)化學(xué)習(xí)的目標(biāo)檢測(cè)算法案例
基于Transformer的目標(biāo)檢測(cè)算法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論