") 「技術(shù)」室內(nèi)定位—AOA測距算法,定位精度可達(dá)1m
「技術(shù)」室內(nèi)定位—AOA測距算法,定位精度可達(dá)1m
什么是AOA測距?
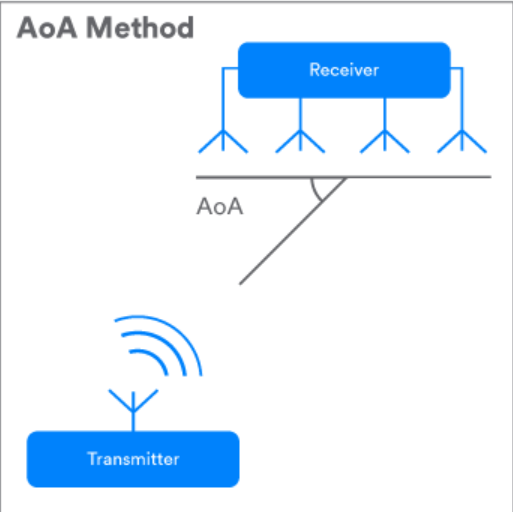
到達(dá)角度測距(Angle-of-Arrival:AOA):基于信號(hào)到達(dá)角度的定位算法是典型的、基于測距的定位算法,在無線傳感網(wǎng)絡(luò)應(yīng)用中,AOA(到達(dá)角度測距)作為網(wǎng)絡(luò)節(jié)點(diǎn)自定位一種常見的定位算法,其主要特點(diǎn)有:成本低、定位精度高等。主要是通過一些應(yīng)用固件探測發(fā)射信號(hào)的到達(dá)方向,然后根據(jù)接收節(jié)點(diǎn)與始發(fā)節(jié)點(diǎn)之間的交錯(cuò)夾角,再利用三角測量或者是其他角位推算出發(fā)送信號(hào)中存在未知節(jié)點(diǎn)的位置,在目前無線應(yīng)用市場中被廣泛利用。
關(guān)于AOA算法的基本原理
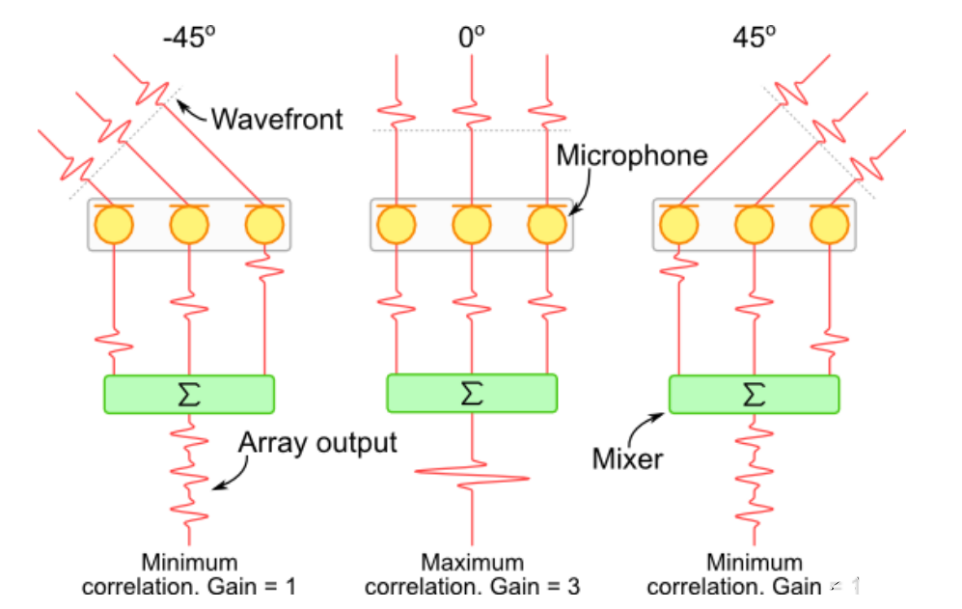
在無線信號(hào)傳輸過程中,在對(duì)信號(hào)傳輸中信號(hào)傳播方向構(gòu)成的不同角度、范圍的天線陣列信號(hào),不同的天線所接收到的信號(hào)都會(huì)存在一個(gè)接收信號(hào)時(shí)間差,而這個(gè)時(shí)間差則可以用來對(duì)應(yīng)不同的信號(hào)到達(dá)角度,這就是AOA技術(shù)基于信號(hào)到達(dá)角度定位算法的基本原理,可以參考下圖。
按照不同信號(hào)到達(dá)角度構(gòu)成的時(shí)間差這樣的思路來看,從信號(hào)傳輸?shù)慕嵌壬蟻碚f,AOA算法的核心理論就是需要計(jì)算到不同天線所接收的時(shí)間差。就是在藍(lán)牙芯片開放藍(lán)牙射頻端的載波振幅和相位收發(fā)值時(shí),根據(jù)不同的天線陣列設(shè)計(jì)使用I/Q(相位值)值計(jì)算出信號(hào)到達(dá)角度方位,再通過兩個(gè)不同方位的接收端,就可以判斷出發(fā)射端的精確位置(這個(gè)誤差大約為125px,目前市場上較為高精度的數(shù)據(jù))。
常見的時(shí)間差計(jì)算方法
不同天線上信號(hào)到達(dá)時(shí)間差的計(jì)算方法有兩種:
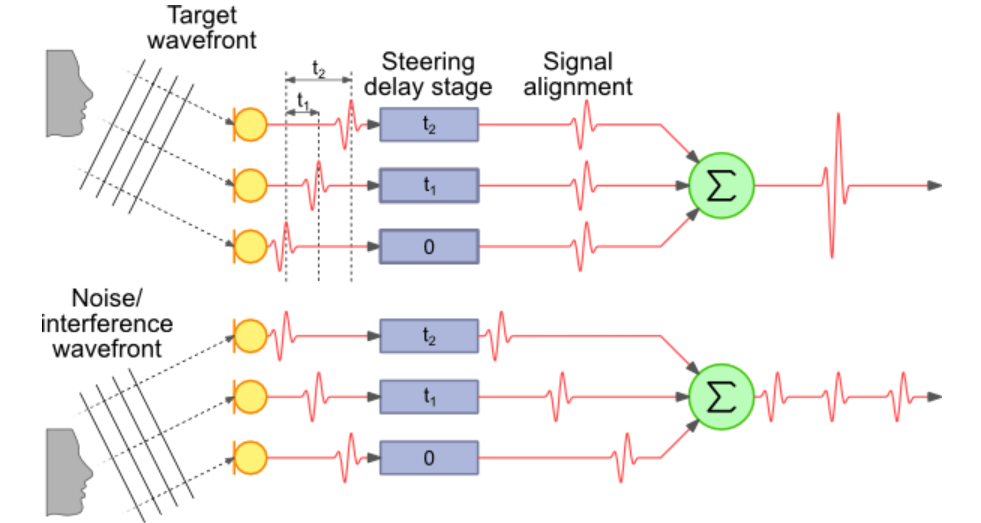
①在接收到信號(hào)時(shí),采用信號(hào)時(shí)延計(jì)算方法進(jìn)行確定,再結(jié)合信號(hào)當(dāng)前傳播速率以及陣列幾何分布來計(jì)算到達(dá)角度。
②Beamforming——波束成形技術(shù),將從不同方向的信號(hào)進(jìn)行加強(qiáng)放大,然后按照不同方向上的信息強(qiáng)度來確定到達(dá)角度。
根據(jù)到達(dá)角度進(jìn)行定位具體算法
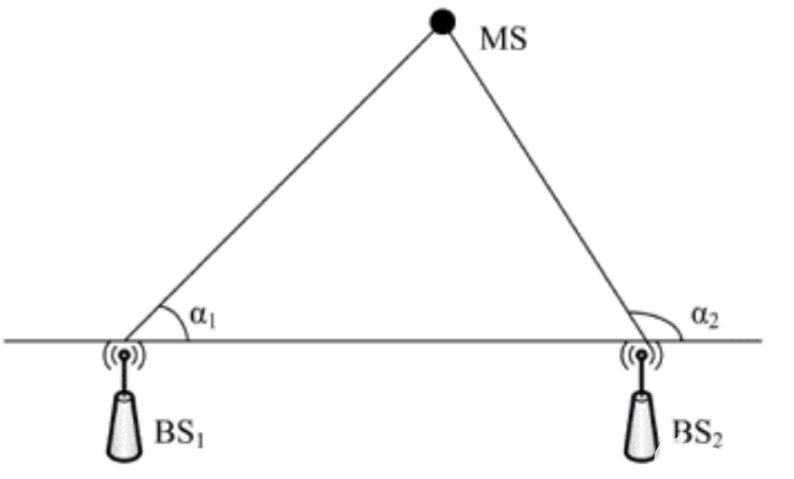
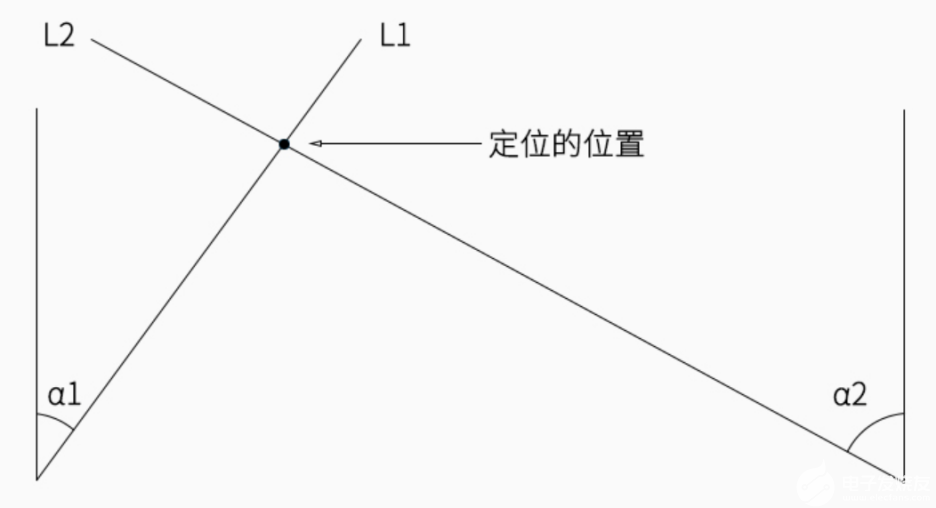
在基站的位置已知的條件下,基站發(fā)送的信號(hào)到達(dá)兩個(gè)已經(jīng)被定位的節(jié)點(diǎn):基站1到設(shè)備之間連線與基準(zhǔn)方向的夾角α1,同時(shí)基于此方向畫一條射線L1;同樣基站2到設(shè)備之間連線與基準(zhǔn)方向的夾角α2,基于此方向畫一條射線L2。那么射線L1與射線L2的交點(diǎn)就是設(shè)備的到達(dá)角位置。
將基站BS1的坐標(biāo)記作(x1,y1),BS2的坐標(biāo)記作(x2,y2),被測節(jié)點(diǎn)坐標(biāo)為(x,y)。
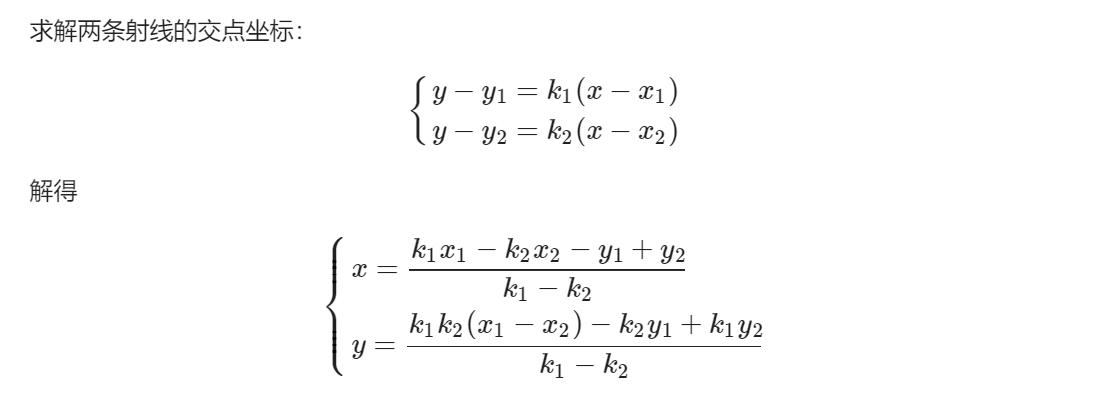
假設(shè)α1和α2均不為90°,則兩射線的直線方程分別為 y?y1=k1(x?x1),y?y2=k2(x?x2),其中k1=tan(α1),k2=tan(α2)
假設(shè)基站BS1的坐標(biāo)為(0,0),BS2的坐標(biāo)為(1,0),α1=30°,α2=120°,求被定位節(jié)點(diǎn)的代碼如下:
x1=0;y1=0;x2=1;
y2=0;α1=30;
α2=120;k1=tan(α1/180pi);k2=tan(α2/180pi);
x=(k1x1-k2x2-y1+y2)/(k1-k2)
y=(k1k2(x1-x2)-k2y1+k1y2)/(k1-k2)
結(jié)果為
x = 0.750,y = 0.433
(x,y)=(0.75,0.433)即為被定為節(jié)點(diǎn)的位置。
若α1或α2為90°時(shí),兩射線方程為x=x1或x=x2,和另一射線聯(lián)立即可求得被測節(jié)點(diǎn)位置。
AOA技術(shù)物聯(lián)網(wǎng)應(yīng)用場景
AOA定位技術(shù)作為目前室內(nèi)定位的主要無線技術(shù)之一,可以向?qū)ο?a target="_blank">標(biāo)簽提供精準(zhǔn)定位信息,還可以用于對(duì)人員活動(dòng)軌跡的跟蹤,以及對(duì)室內(nèi)固定資產(chǎn)的的控制,目前主要的應(yīng)用場景有:
①智慧城市——超市商場:商場中的定位服務(wù)以及商場中的商品可以進(jìn)行標(biāo)簽固定,避免出現(xiàn)取貨不付錢的情況。
②工業(yè)智能化——工廠:可以給工人進(jìn)行定位,并對(duì)工作區(qū)域進(jìn)行優(yōu)先級(jí)/權(quán)限劃分。除此之外,還可以對(duì)工業(yè)機(jī)器人進(jìn)行定位操作,為其規(guī)劃線路并控制其工作等等。
審核編輯:湯梓紅
-
室內(nèi)定位
+關(guān)注
關(guān)注
30文章
307瀏覽量
36939 -
AOA
+關(guān)注
關(guān)注
1文章
73瀏覽量
14121
發(fā)布評(píng)論請(qǐng)先 登錄
AOA 和 channel Sounding 和 rssi 定位技術(shù)對(duì)比
UWB 定位測距
智慧化工園區(qū)高精度室內(nèi)定位解決方案
?藍(lán)牙AOA定位技術(shù)的未來前景
藍(lán)牙AOA定位的優(yōu)勢有哪些
藍(lán)牙AoA高精度室內(nèi)定位技術(shù)的應(yīng)用場景
aoa室內(nèi)定位技術(shù)的優(yōu)劣勢和應(yīng)用前景
高精度域內(nèi)定位技術(shù)AOA與RSSI區(qū)別有哪些
無線室內(nèi)定位系統(tǒng)是通過什么技術(shù)實(shí)現(xiàn)的呢?

藍(lán)牙AOA是如何實(shí)現(xiàn)人員定位的呢
高精度藍(lán)牙aoa定位原理和應(yīng)用場景
如何利用LoRa實(shí)現(xiàn)室內(nèi)定位?

智慧倉儲(chǔ)高精度室內(nèi)定位解決方案介紹

u-blox發(fā)布功能全面的室內(nèi)定位解決方案u-locate
基于java+單體服務(wù) +?硬件(UWB定位基站、卡牌)技術(shù)架構(gòu)開發(fā)的UWB室內(nèi)定位系統(tǒng)源碼






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論