 【地平線旭日X3派試用體驗】X3派開箱及開發環境搭建
【地平線旭日X3派試用體驗】X3派開箱及開發環境搭建
本文來源電子發燒友社區,作者:yjp, 帖子地址:https://bbs.elecfans.com/jishu_2303179_1_1.html
地平線旭日X3派開發板是我見過,AI計算算力最強,開源程度最深,AI算法集成度最高的開發板,再此表示感謝。
環境安裝在進行AI算法開發之前請參考X3派用戶手冊完成系統安裝及配置,此時X3派上已默認安裝好了地平線Python版本AI推理引擎(hobot_dnn)及其配套依賴環境。hobot_dnn提供了Model、pyDNNTensor、TensorProperties三個類和load接口。您可通過如下方式獲取hobot_dnn的基本信息:
-------------------------------------------------------------------------------------------------------------------------------
python3
>>> from hobot_dnn import pyeasy_dnn as dnn
>>> dir(dnn)
['Model', 'TensorProperties', '__doc__', '__file__', '__loader__', '__name__', '__package__', '__spec__', 'load', 'pyDNNTensor']
-------------------------------------------------------------------------------------------------------------------------------
AI推理引擎的更新可參考如下方式(出于系統安全、穩定性的考慮,建議統一通過APT命令更新X3派板級開發包):
-------------------------------------------------------------------------------------------------------------------------------
#更新package列表
sudo apt update
#升級所有已安裝的軟件包到最新版本
sudo apt full-upgrade
#清除緩存文件(非必須)
sudo apt clean
#重啟設備
sudo reboot
-------------------------------------------------------------------------------------------------------------------------------
1 推理接口介紹1.1 ModelAI算法模型類,描述模型的名稱,輸入、輸出數據屬性信息,forward 方法用來完成算法的推理。
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.Model
'''
Parameters:
1、name (string):模型名稱
2、inputs (tuple(hobot_dnn.pyeasy_dnn.pyDNNTensor)):模型的輸入tensor
3、outputs (tuple(hobot_dnn.pyeasy_dnn.pyDNNTensor)):模型的輸出tensor
4、forward (args &args, kwargs &kwargs):模型推理函數接口,輸入模型推理所必要的參數,返回模型推理結果
parameters:
input_tensor:輸入數據
core_id (int):模型推理的core id,可為0,1,2,默認為0表示任意核推理
priority (int):當前模型推理任務的優先級,范圍[0~255],越大優先級越高
'''
-------------------------------------------------------------------------------------------------------------------------------
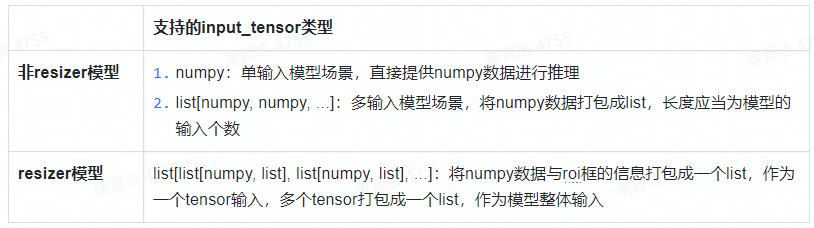
其中,forward方法的input_tensor支持三種格式輸入:
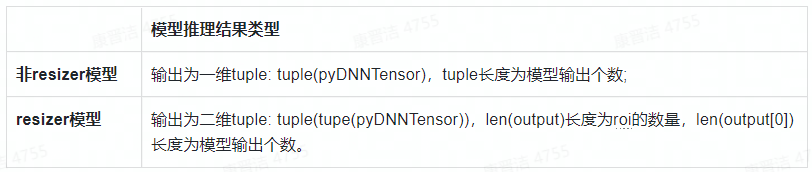
forward方法的返回值為模型推理結果,有如下兩種情況:
1.2 pyDNNTensorAI 算法輸入、輸出 tensor 類
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.pyDNNTensor
'''
Parameters:
1、properties (TensorProperties):tensor的屬性,詳細參見本文1.3節
2、buffer (numpy):tensor中的數據,數據訪問方式同numpy
3、name (string):tensor的名稱
'''
-------------------------------------------------------------------------------------------------------------------------------
1.3 TensorPropertiesAI 算法輸入/輸出 tensor 的屬性類
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.TensorProperties
'''
Parameters:
1、tensor_type (string):tensor的數據類型,如:NV12、BGR、float32等
2、dtype (string):數據的存儲類型,同numpy數據類型,如:int8、uint8、float32等
3、layout (string):數據排布格式,NHWC或者NCHW
4、shape (tuple):數據的shape信息,例如:(1,3,224,224)
'''
-------------------------------------------------------------------------------------------------------------------------------
1.4 loadload接口用于加載模型
-------------------------------------------------------------------------------------------------------------------------------
hobot_dnn.pyeasy_dnn.load(model_file)
'''
接口支持兩種模型加載方式:
1、輸入模型的文件路徑,加載單個模型,或者單個pack模型
model_file = "/userdata/single_model.bin"
models = hobot_dnn.pyeasy_dnn.load(model_file)
2、輸入模型的文件列表,加載多個模型
model_file = ["model1.bin", "model2.bin"]
models = hobot_dnn.pyeasy_dnn.load(model_file)
接口返回hobot_dnn.pyeasy_dnn.Model類型的tuple列表
'''
-------------------------------------------------------------------------------------------------------------------------------
2 快速上手示例X3派配套AI推理示例默認安裝在/app/ai_inference目錄下,包含如下示例:
-------------------------------------------------------------------------------------------------------------------------------
|-- 01_basic_sample # 從本地讀取圖片并完成mobilenetv1分類模型推理
|-- 02_usb_camera_sample # 從USB camera獲取視頻數據并完成FCOS檢測模型推理
|-- 03_mipi_camera_sample # 從MIPI camera獲取視頻數據并完成FCOS檢測模型推理
|-- 05_web_display_camera_sample # 基于MIPI Camera的FCOS目標檢測及web端展示
|-- 06_yolov3_sample # 從本地讀取圖片并完成Yolov3檢測模型推理
|-- 07_yolov5_sample # 從本地讀取圖片并完成Yolov5檢測模型推理
`-- models
-------------------------------------------------------------------------------------------------------------------------------
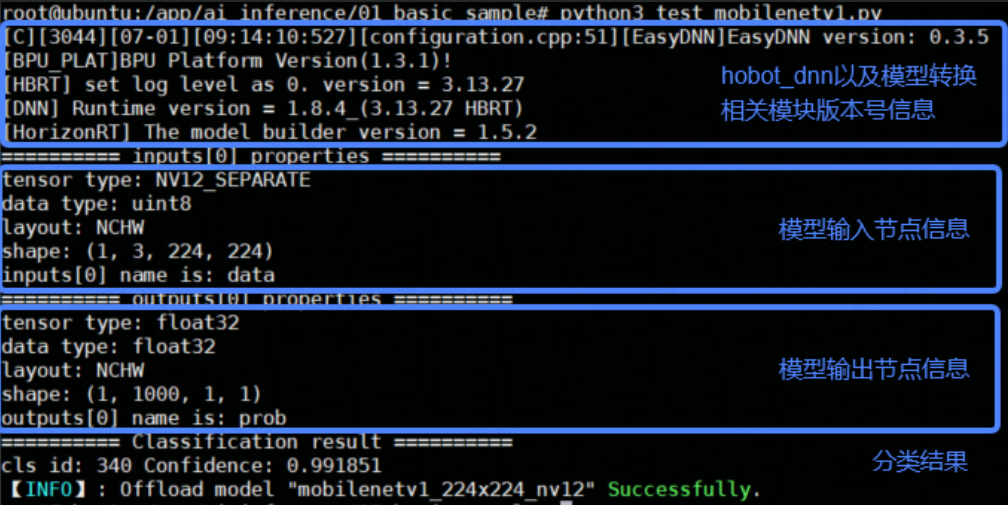
本節將以01_basic_sample為例,為大家展示如何使用hobot_dnn完成模型推理。運行以下示例您需要準備編譯好的混合異構模型mobilenetv1_224x224_nv12.bin(存放于/app/ai_inference/models路徑下),以及一張圖片zebra_cls.jpg(存放于01_basic_sample文件夾下)。
-------------------------------------------------------------------------------------------------------------------------------
from hobot_dnn import pyeasy_dnn as dnn
import numpy as np
import cv2
# 查看模型輸入輸出節點的信息
def print_properties(pro):
print("tensor type:", pro.tensor_type)
print("data type:", pro.dtype)
print("layout:", pro.layout)
print("shape:", pro.shape)
# 依據模型input_type_rt決定是否需要進行數據格式轉換(本實例所用模型為nv12輸入)
def bgr2nv12_opencv(image):
height, width = image.shape[0], image.shape[1]
area = height * width
yuv420p = cv2.cvtColor(image, cv2.COLOR_BGR2YUV_I420).reshape((area * 3 // 2,))
y = yuv420p[:area]
uv_planar = yuv420p[area:].reshape((2, area // 4))
uv_packed = uv_planar.transpose((1, 0)).reshape((area // 2,))
nv12 = np.zeros_like(yuv420p)
nv12[:height * width] = y
nv12[height * width:] = uv_packed
return nv12
# 1.加載模型
models = dnn.load('../models/mobilenetv1_224x224_nv12.bin')
# 2.查看模型輸入輸出節點的信息
for input in models[0].inputs:
print_properties(input.properties)
for output in models[0].outputs:
print_properties(output.properties)
# 3.準備輸入數據
# 打開圖片
img_file = cv2.imread('./zebra_cls.jpg')
# 把圖片縮放到模型的輸入尺寸
h, w = models[0].inputs[0].properties.shape[2], models[0].inputs[0].properties.shape[3]
resized_data = cv2.resize(img_file, (w, h), interpolation=cv2.INTER_AREA)
nv12_data = bgr2nv12_opencv(resized_data)
# 4.模型推理
outputs = models[0].forward(nv12_data)
# 5.后處理
np.argmax(outputs[0].buffer)
print("cls id: %d Confidence: %f" % (np.argmax(outputs[0].buffer), outputs[0].buffer[0][np.argmax(outputs[0].buffer)]))
-------------------------------------------------------------------------------------------------------------------------------
地平線旭日X3派開發板是我見過,AI計算算力最強,開源程度最深,AI算法集成度最高的開發板,再此表示感謝。
環境安裝在進行AI算法開發之前請參考X3派用戶手冊完成系統安裝及配置,此時X3派上已默認安裝好了地平線Python版本AI推理引擎(hobot_dnn)及其配套依賴環境。hobot_dnn提供了Model、pyDNNTensor、TensorProperties三個類和load接口。您可通過如下方式獲取hobot_dnn的基本信息:
-------------------------------------------------------------------------------------------------------------------------------
python3
>>> from hobot_dnn import pyeasy_dnn as dnn
>>> dir(dnn)
['Model', 'TensorProperties', '__doc__', '__file__', '__loader__', '__name__', '__package__', '__spec__', 'load', 'pyDNNTensor']
-------------------------------------------------------------------------------------------------------------------------------
AI推理引擎的更新可參考如下方式(出于系統安全、穩定性的考慮,建議統一通過APT命令更新X3派板級開發包):
-------------------------------------------------------------------------------------------------------------------------------
#更新package列表
sudo apt update
#升級所有已安裝的軟件包到最新版本
sudo apt full-upgrade
#清除緩存文件(非必須)
sudo apt clean
#重啟設備
sudo reboot
-------------------------------------------------------------------------------------------------------------------------------
1 推理接口介紹1.1 ModelAI算法模型類,描述模型的名稱,輸入、輸出數據屬性信息,forward 方法用來完成算法的推理。
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.Model
'''
Parameters:
1、name (string):模型名稱
2、inputs (tuple(hobot_dnn.pyeasy_dnn.pyDNNTensor)):模型的輸入tensor
3、outputs (tuple(hobot_dnn.pyeasy_dnn.pyDNNTensor)):模型的輸出tensor
4、forward (args &args, kwargs &kwargs):模型推理函數接口,輸入模型推理所必要的參數,返回模型推理結果
parameters:
input_tensor:輸入數據
core_id (int):模型推理的core id,可為0,1,2,默認為0表示任意核推理
priority (int):當前模型推理任務的優先級,范圍[0~255],越大優先級越高
'''
-------------------------------------------------------------------------------------------------------------------------------
其中,forward方法的input_tensor支持三種格式輸入:
forward方法的返回值為模型推理結果,有如下兩種情況:
resizer模型指在模型轉換時input_source設置為“resizer”編譯生成的模型,相關配置方式可參考社區X3 用戶手冊。resizer模型推理時,hobot_dnn會先使用ROI從輸入數據中摳圖后resize到模型輸入大小再送入模型進行推理。
*目前resizer模式暫只支持單輸入的nv12/nv12_bt601模型。
1.2 pyDNNTensorAI 算法輸入、輸出 tensor 類
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.pyDNNTensor
'''
Parameters:
1、properties (TensorProperties):tensor的屬性,詳細參見本文1.3節
2、buffer (numpy):tensor中的數據,數據訪問方式同numpy
3、name (string):tensor的名稱
'''
-------------------------------------------------------------------------------------------------------------------------------
1.3 TensorPropertiesAI 算法輸入/輸出 tensor 的屬性類
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.TensorProperties
'''
Parameters:
1、tensor_type (string):tensor的數據類型,如:NV12、BGR、float32等
2、dtype (string):數據的存儲類型,同numpy數據類型,如:int8、uint8、float32等
3、layout (string):數據排布格式,NHWC或者NCHW
4、shape (tuple):數據的shape信息,例如:(1,3,224,224)
'''
-------------------------------------------------------------------------------------------------------------------------------
1.4 loadload接口用于加載模型
-------------------------------------------------------------------------------------------------------------------------------
hobot_dnn.pyeasy_dnn.load(model_file)
'''
接口支持兩種模型加載方式:
1、輸入模型的文件路徑,加載單個模型,或者單個pack模型
model_file = "/userdata/single_model.bin"
models = hobot_dnn.pyeasy_dnn.load(model_file)
2、輸入模型的文件列表,加載多個模型
model_file = ["model1.bin", "model2.bin"]
models = hobot_dnn.pyeasy_dnn.load(model_file)
接口返回hobot_dnn.pyeasy_dnn.Model類型的tuple列表
'''
-------------------------------------------------------------------------------------------------------------------------------
2 快速上手示例X3派配套AI推理示例默認安裝在/app/ai_inference目錄下,包含如下示例:
-------------------------------------------------------------------------------------------------------------------------------
|-- 01_basic_sample # 從本地讀取圖片并完成mobilenetv1分類模型推理
|-- 02_usb_camera_sample # 從USB camera獲取視頻數據并完成FCOS檢測模型推理
|-- 03_mipi_camera_sample # 從MIPI camera獲取視頻數據并完成FCOS檢測模型推理
|-- 05_web_display_camera_sample # 基于MIPI Camera的FCOS目標檢測及web端展示
|-- 06_yolov3_sample # 從本地讀取圖片并完成Yolov3檢測模型推理
|-- 07_yolov5_sample # 從本地讀取圖片并完成Yolov5檢測模型推理
`-- models
-------------------------------------------------------------------------------------------------------------------------------
本節將以01_basic_sample為例,為大家展示如何使用hobot_dnn完成模型推理。運行以下示例您需要準備編譯好的混合異構模型mobilenetv1_224x224_nv12.bin(存放于/app/ai_inference/models路徑下),以及一張圖片zebra_cls.jpg(存放于01_basic_sample文件夾下)。
-------------------------------------------------------------------------------------------------------------------------------
from hobot_dnn import pyeasy_dnn as dnn
import numpy as np
import cv2
# 查看模型輸入輸出節點的信息
def print_properties(pro):
print("tensor type:", pro.tensor_type)
print("data type:", pro.dtype)
print("layout:", pro.layout)
print("shape:", pro.shape)
# 依據模型input_type_rt決定是否需要進行數據格式轉換(本實例所用模型為nv12輸入)
def bgr2nv12_opencv(image):
height, width = image.shape[0], image.shape[1]
area = height * width
yuv420p = cv2.cvtColor(image, cv2.COLOR_BGR2YUV_I420).reshape((area * 3 // 2,))
y = yuv420p[:area]
uv_planar = yuv420p[area:].reshape((2, area // 4))
uv_packed = uv_planar.transpose((1, 0)).reshape((area // 2,))
nv12 = np.zeros_like(yuv420p)
nv12[:height * width] = y
nv12[height * width:] = uv_packed
return nv12
# 1.加載模型
models = dnn.load('../models/mobilenetv1_224x224_nv12.bin')
# 2.查看模型輸入輸出節點的信息
for input in models[0].inputs:
print_properties(input.properties)
for output in models[0].outputs:
print_properties(output.properties)
# 3.準備輸入數據
# 打開圖片
img_file = cv2.imread('./zebra_cls.jpg')
# 把圖片縮放到模型的輸入尺寸
h, w = models[0].inputs[0].properties.shape[2], models[0].inputs[0].properties.shape[3]
resized_data = cv2.resize(img_file, (w, h), interpolation=cv2.INTER_AREA)
nv12_data = bgr2nv12_opencv(resized_data)
# 4.模型推理
outputs = models[0].forward(nv12_data)
# 5.后處理
np.argmax(outputs[0].buffer)
print("cls id: %d Confidence: %f" % (np.argmax(outputs[0].buffer), outputs[0].buffer[0][np.argmax(outputs[0].buffer)]))
-------------------------------------------------------------------------------------------------------------------------------
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
開發板試用
+關注
關注
3文章
301瀏覽量
2329
發布評論請先 登錄
相關推薦
熱點推薦
韻樂Vinal X3/X5卡拉OK音頻處理器調音軟件簡介
韻樂Vinal X3/X5卡拉OK音頻處理器調音軟件軟件簡介韻樂Vinal X3/X5調音軟件具有音箱處理器功能的卡拉ok效果器每個功能部分都獨立可調且有相應的PC界面可直觀調節易于操
發表于 05-16 15:33
?0次下載
RDK X3 帶飛的智能護理系統:讓機器人秒變貼心小棉襖
濟往開來團隊帶著超燃黑科技來了!基于 RDK X3 開發的老年智能監控系統,跌倒秒報警、手勢一鍵呼叫、還能陪嘮嗑!最絕的是 開源代碼直接甩鏈接 ,技術黨狂喜!

地平線與博世達成戰略合作
近日,地平線正式宣布與全球領先的汽車技術與服務供應商博世達成戰略合作。根據協議,博世將基于地平線征程6B打造新一代多功能攝像頭,并基于征程6E/M打造博世縱橫輔助駕駛升級版。目前,基于征程6系列開發的博世新一代多功能攝像頭與博世
地平線城區輔助駕駛系統HSD解讀
近日,在2025地平線年度產品發布會上,地平線城區輔助駕駛系統HSD正式發布。作為國內首個軟硬結合全棧開發的城區輔助駕駛系統,地平線HSD搭載當前最高性能的國產智駕計算方案征程6P,采
HMC-XTB110 無源x3倍頻器,24-30GHz輸入技術手冊
應用。 所有焊盤和芯片背面都經過Ti/Au金屬化。 HMC-XTB110無源x3 MMIC可兼容常規的芯片貼裝方法,以及熱壓縮和熱超聲線焊,非常適合MCM和混合微電路應用。 此處顯示的所有數據均是芯片在50 Ohm環境下使用RF探頭接觸測得。
地平線與上汽集團深化戰略合作
近日,上汽集團舉辦“懂車更懂你·2025上汽之夜”活動,地平線創始人兼CEO余凱博士受邀發表主旨演講。作為地平線第一大機構股東,上汽集團在發布會上表示將繼續拓展與地平線等頭部企業的合作,借助各自領域的優勢資源互補,打造擁有全新體

地平線SuperDrive相關問答
近日,地平線SuperDrive智駕百人團體驗活動圓滿落幕,現場130余家媒體對地平線SuperDrive表現出濃厚的興趣并提出了諸多問題。對此,地平線特意整理了大家提出的典型問題并進行解答,希望能幫助大家更全面地了解這套擬人的
地平線SuperDrive首發三大黑科技
近日,“Beyond the Horizon 地平線智駕科技暢想日”在上海舉辦,回顧地平線以軟硬結合技術實力取得的量產創新成果,展望2025高階智駕爆發之年。同時,“SuperDrive智駕百人團體驗活動”在上海靜安區繁華路段開展,首發三大智駕黑科技,打造擬人高效、“10
Cadence推出Palladium Z3與Protium X3系統
楷登電子(Cadence)公司近日宣布,正式推出新一代Cadence? Palladium? Z3 Emulation和Protium? X3 FPGA原型驗證系統。這一組合標志著數字孿生
光庭信息獲地平線堅實后盾獎
后盾獎”,高度肯定了雙方過往在智駕領域的合作成效。 過去兩年內,光庭信息基于地平線 J3、J5 及 J6 等多個平臺,打造了“泊車與駕駛一體化解決方案”,提供高性能的自動駕駛和泊車功能,可以輕松實現跨平臺遷移和新應用開發,有效幫
智駕科技企業地平線登陸港交所
近日,智駕科技企業地平線(地平線機器人-W,股票代碼:9660.HK)在香港交易所主板成功掛牌上市,募資總額高達54.07億港元,成為港股今年最大的科技IPO。

樹莓派是x86還是arm
樹莓派(Raspberry Pi)是一款由英國樹莓派基金會(Raspberry Pi Foundation)開發的微型計算機。它基于ARM架構,而非x86架構。 一、樹莓





 工商網監
工商網監
評論