 機電一體化如何改進無人機技術
機電一體化如何改進無人機技術

無人機是實踐中機電一體化的一個很好的例子。他們有許多相互關聯的系統,這些系統依賴于多個學科來按設計進行通信和運行。在本文中,我們將探討無人機的內部工作原理以及使它們成為可能的技術。
無人機的定義已經涵蓋了大多數小型無人駕駛車輛,包括遙控飛機。從技術上講,無人機還意味著一定程度的自主性,從簡單的自平衡到更復雜的功能,如不干涉 GPS 航路點導航任務或集群邏輯。這是導致最近無人機無處不在的每個基本機電一體化領域(電氣、計算機、機械和控制工程)最近幾項技術突破的高潮。
電氣工程
使這些轟動一時的事情脫離實際的一些最大的發展是在電氣工程中。直到現在,電動機和電池還沒有能力舉起自己的重量。愛好者一直在使用小型汽油發動機,它們不具備與電氣系統幾乎相同水平的速度控制或原型設計能力。
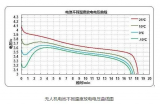
鋰聚合物電池因其功率密度和輸出速率而使電動飛行成為可能。為了達到與傳統鎳鎘電池、堿性電池或鋰離子電池相同的功率輸出,重量將變得難以飛行。鋰聚合物 (LiPo) 的強大功能帶來了更高的揮發性,因此需要小心處理,以防止熱失控(爆炸)或不可逆的化學放電。
無刷電機并不是全新的。與使用物理金屬墊沿電機軸滑動并換向功率的傳統有刷電機不同(通常效率約為 80%),無刷電機通過選擇性地激活偏置線圈旋轉來避免摩擦損失,效率約為 90%。此外,可以控制旋轉速度。
無刷電機與電子速度控制器 (ESC) 協同工作,電子速度控制器可將電流調節到正確的電機線圈。ESC 通過脈寬調制 (PWM) 通信線路接收命令速度并將其轉換為正確的電機節奏。
保持人類對這些設備的控制的一個重要環節是無線電網絡。通常,用戶命令通過 900 mhz、1.2 ghz 或 2.4 ghz 在民用頻段內發送。由于有如此多的設備在相同的頻率上通話,因此發射機通常采用“跳頻”。這種技術與接收器協調快速的頻道變化,以避免因干擾而失敗,從而阻止單個頻道上的通信。
計算機工程
雖然處理要求不高,但微控制器、功率晶體管和傳感器的小型化和成本降低也降低了其他組件的有效載荷要求。
計算機工程對于在所有組件之間建立通信和處理控制算法至關重要。用戶命令通過具有 PWM 通信機制的無線電接收器輸入微控制器。傳感器被讀取和分解,然后通過控制算法與用戶命令相結合。輸出信號通過 PWM 發送到 ESC 和電機。
機械工業
機械設計在機身中最為明顯。飛機和多旋翼飛行器的幾何形狀對于實現最大強度和輕量化以提高效率至關重要。強度不僅對于在不可避免的碰撞中幸存下來很重要,而且對于在推力和湍流載荷下的剛度也很重要。
使用機翼產生升力的翼型設計通常效率更高,長距離使用的功率更少,但不具備多旋翼飛行器的敏捷性。由于飛機通過在空氣中移動產生升力,它們也更容易受到風和湍流的影響,因此如果它們太小,它們就會變得難以控制。
飛機的一般形狀由所需升力、效率、目標有效載荷大小和角度穩定性的權衡決定。
L = (1/2) dv 2 s C L
L = lift,它必須等于飛機的重量,以磅為單位。
d = 空氣密度。 這會因海拔而改變。這些值可以在國際民航組織標準大氣表中找到。
v = 飛機的速度, 以英尺/秒表示。
s = 飛機的機翼面積 ,以平方英尺為單位。
C L = 升力系數,由翼型和迎角決定。
以下是無人機機翼設計的一些初步考慮:
為了設計更大的升力,機翼必須有更大的表面積,橫截面弦會更高,并且需要更大的推力
為了提高效率,機翼應該長而細長,以擴展低壓升力區并推遲翼尖渦流,從而增加阻力。然而,機翼只能在結構上可行的情況下變得纖細和長。機翼的俯視輪廓(矩形、梯形、橢圓形或后掠形)將在不同速度下改變失速特性。飛機也會減速以減少阻力和湍流。
為了設計一個更靈活的飛機,機翼和機尾必須更短,橫截面應該是鈍的和對稱的,以防止在更大的迎角下失速。
四軸飛行器設計已變得無處不在,因為它在機械上是最簡單、最堅固的無人機。使用以矩形方式安裝的四個電機,當 這些東西碰撞時,沒有小齒輪或連桿會斷裂 。
翻滾(向左或向右傾斜)是通過打開或關閉左側或右側的電機組來完成的。俯仰(向前和向后移動)類似地通過打開或關閉后組或前組電機來實現。偏航(左轉或右轉)很有趣:由于對角線的電機組以相反的方向旋轉(即左前和右后電機逆時針旋轉),給一對電機加電并減少另一對電機的動力將保持升力,但會產生網瞬間轉動身體。
直升機、雙旋翼機和三旋翼機沒有足夠的電機來控制所有角度自由度,因此它們采用聯動裝置和小齒輪電機來調整其有限電機的俯仰角。盡管它們在某些方面更有效,但它們在機械上更復雜,因此更難以原型構建并且容易損壞。
六軸飛行器有六個螺旋槳,如果電機出現故障,則具有更高的穩定性和一些冗余。如果電機發生故障,八軸飛行器具有完全冗余的受控飛行。這些機身通常用于精密、昂貴或重型有效載荷。
控制工程
控制工程是與對系統做出平穩和快速響應有關的領域。這是通過了解系統的動態來設計接受用戶命令、循環反饋、重新處理數據和調整輸出的算法來實現的。由于大多數這些機身本質上是不穩定的(也就是說,它們會在沒有即時計算機幫助的情況下瘋狂翻轉),因此需要控制工程來保持它們在空中。
最重要的傳感器是組合陀螺儀和加速度計,也稱為 IMU。它們共同建立了對無人機運動的敏感和準確的理解,這是無人機自我平衡和保持水平所必需的。該算法讀取所需狀態的用戶命令,通過各種傳感器提供測量狀態的信息,通過控制功能處理這些數據,然后更新輸出。
最常用的控制方式是比例-積分-微分 (PID) 控制器。理解和調整相當簡單,因為大多數無人機都在不斷地調整,必須進行增量調整。簡而言之,“P”對與期望狀態的瞬時偏移做出反應,“I”聚合了偏移的歷史,“D”預測了未來的偏移。
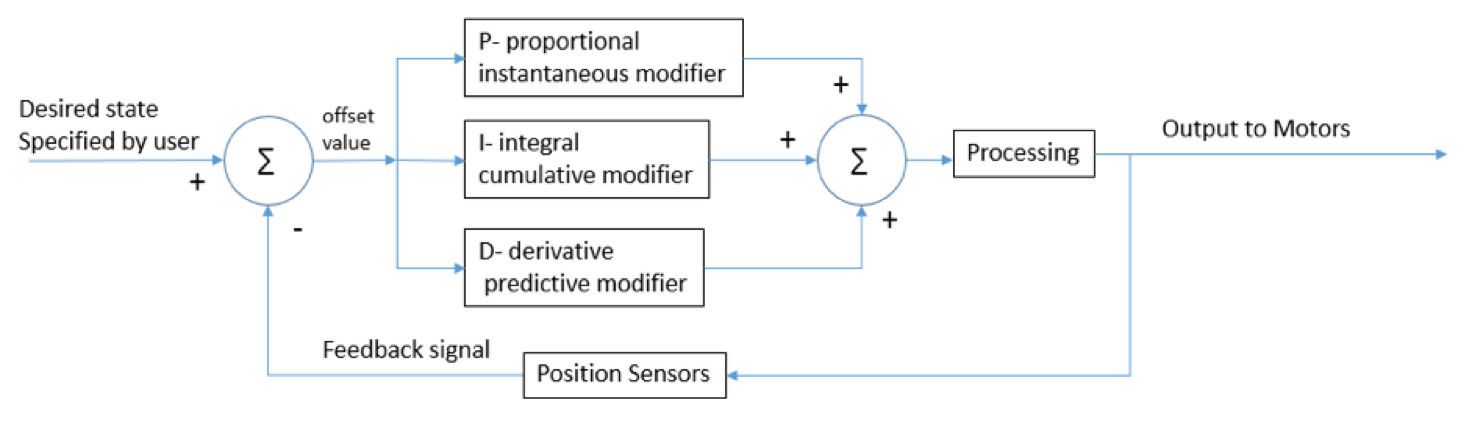
【圖 | PID 控制器相當容易理解和調整。]
通過添加其他傳感器,控件還可以在導航自主中循環。氣壓計用于高度控制,向下超聲波距離傳感器可以提高低高度精度。GPS 和磁力計增加了執行航路點任務的位置和航向意識。
無人機正在推動所有機電一體化領域的進步,在搜索和救援、包裹遞送、測量和檢查以及 3D 組裝等角色中變得越來越有用。無人機的下一代目標包括避障和物體跟蹤,以提高態勢感知能力。此外,預計會看到群邏輯與合作伙伴無人機組成編隊,以完成組裝和增加飛行有效載荷、航程和持續時間等復雜任務。
審核編輯:郭婷
-
傳感器
+關注
關注
2565文章
52987瀏覽量
767307 -
控制器
+關注
關注
114文章
17102瀏覽量
184234 -
無人機
+關注
關注
231文章
10841瀏覽量
186752
發布評論請先 登錄
無人機巡檢的應用及其優勢
電機群網絡管控一體化PLC-SCADA設計及應用
為什么新能源電站要用無人機風光一體化巡檢系統?

3000W激光反制無人機系統 - 全天候守護重點區域安全防線
植保無人機電池的選擇和保養策略
植保無人機電池性能測試方法






 工商網監
工商網監
評論