 介紹一種比較簡單的工業現場相機坐標系和機械手坐標系的標定方案
介紹一種比較簡單的工業現場相機坐標系和機械手坐標系的標定方案
工業現場使用視覺時一般需要相機坐標系和機械手臂坐標系的轉化,這里介紹一種比較簡單的標定方案。沒有使用到標定板。經過幾個項目的測試,精度還算可以,如果要求高精度的場合,就用標定板標定吧!
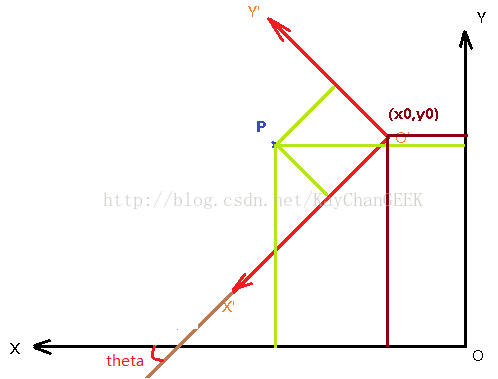
如上圖所示:OXY為機械手坐標系,O'X'Y'為相機坐標系。theta為兩個坐標系之間的夾角。假設P點在圖像上的位置如圖,則P在機械手坐標系有一個坐標,在圖像坐標系也有一個坐標。我們要做的工作就是圖像上的任意一點都可以轉化為機械手坐標系上的坐標點:P(Machine) = f(P(Image))。接下來介紹如何找到這個關系。
OXY為機械手坐標系 O'X'Y'為相機坐標系從上圖可以看出坐標轉化關系:
x= x' * r * cos(theta) - y' * r * sin(theta) + x0;
y = x' * r * sin(theta) + y' * r * cos(theta) + y0;
其中r是毫米像素比、(mm/pixel)就是一個毫米有幾個像素,theta為兩個坐標系之間的夾角,(x0,y0)為圖像坐標原點到機械坐標原點的距離。
簡化抽象公式,假設:
a = r * cos(theta);
b = r * sin(theta);
c = x0;
d = y0;
得到:
x= x' * a - y' * b + c;
y = x' * b + y' * a + d;
很顯然,要解出這個方程,需要兩組對應關系,就是兩組對應的坐標點。設兩組坐標點,如下:
第一組:圖像坐標點:(xImage1,yImage1) 對應的機械坐標點:(xMachine1,yMachine1)
第二組:圖像坐標點:(xImage2,yImage2) 對應的機械坐標點:(xMachine2,yMachine2)
則可以解出a ,b, c, d。如下:
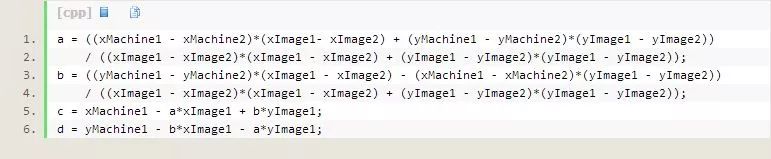
所以,就得出了圖像上任意一點的像素坐標轉成機械手坐標的關系。
以下是我寫的一個求解a ,b, c, d軟件:
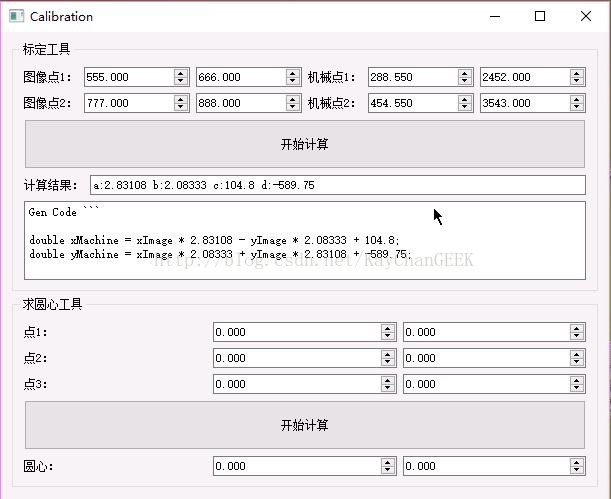
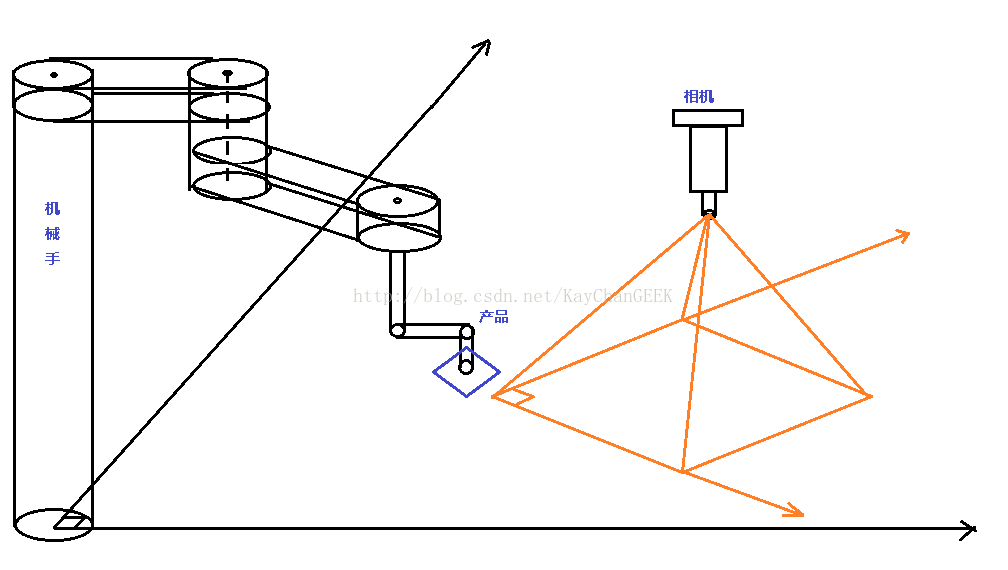
下面舉個栗子說明一下操作吧!這是我實際項目中的機械手和相機布局情況,畫圖真T``M`累!,如下圖:
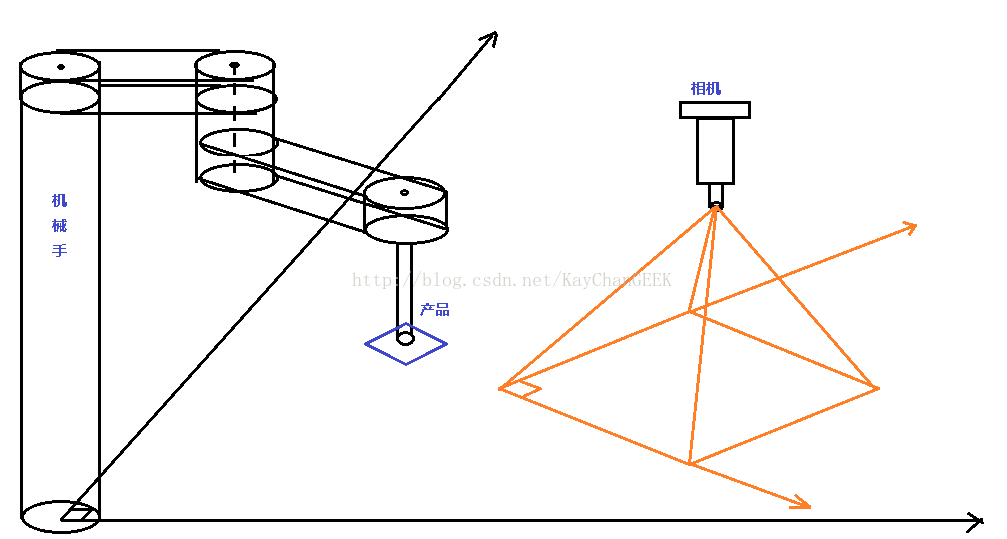
首先將產品上的目標點搞到機械手的Z軸的中心,然后移動到相機視野范圍內,讓識別產品上的目標點,這時,你會讀到一組機械手坐標(也就是上面所說的(xMachine1,yMachine1)),和一組相機坐標(也就是上面所說的(xImage1,yImage1)),再在相機視野范圍內移動機械手,就可以得到第二組數據(xMachine2,yMachine2)和(xImage2,yImage2),寫入標定軟件就可以求出a, b, c, d。就求出了圖像上任意一點對應的機械坐標,然后你下次移動第二個產品到相機視野時,首先識別目標點的像素坐標,經過對應的轉換就可以得出機械坐標,然后進行相應的偏移即可實現你想要的操作!
當然,有些時候,實際現場并沒有如你所愿,現在出現一種情況就是以機械手自帶的Z軸無法移動到視野中去,這樣就無法進行上面的操作了,系不系!這也是我遇到的情況,SO,我的解決方案如下:先上示意圖:
如圖,就是在機械手Z軸的橫桿上加上一個橫條,使得產品可以移動到視野范圍內。然后進行上面的操作,雖然現在可以將產品移動到視野范圍內了,但是你會發現此時機械手的坐標并不是產品的坐標,因為他們之間隔著一個橫條,那我們要怎么換算過來呢!
首先,我們可以這么假定的認為,他們是機械手的坐標就是產品的坐標,然后就可以用上面取兩組對應點的方法求出圖像上每個點的機械坐標了,但是,此時的機械坐標并不是真正的機械坐標,但是,我們可以利用這些坐標找出機械手U軸的旋轉中心就是Z軸(就是實際機械坐標所在的位置)在我們所建立的不是真正的機械坐標系中的坐標。是不是有點不好理解,我也不大清楚怎么描述!求U軸的旋轉中心的過程如下:上圖:
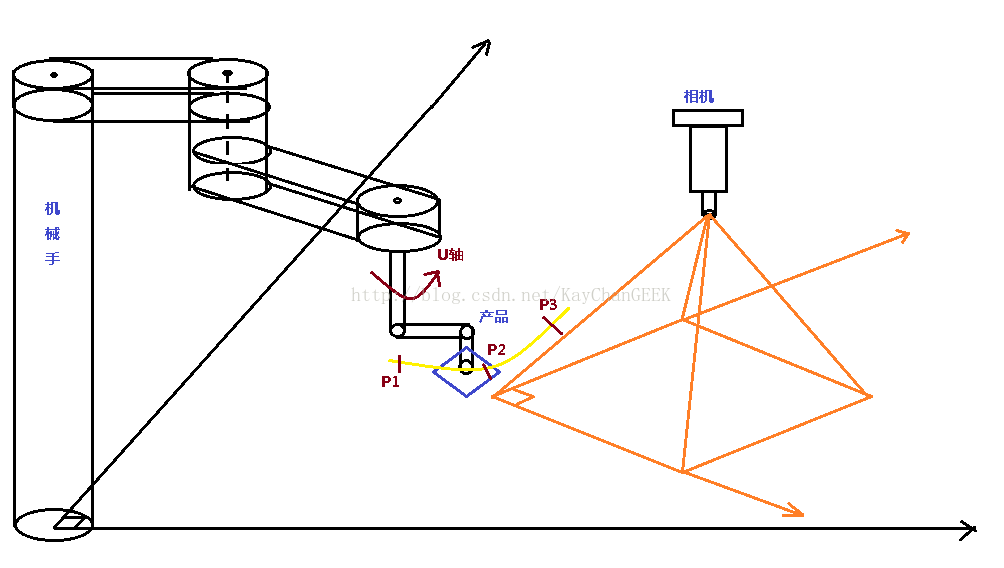
如圖:將產品的目標點繞機械手的U軸的旋轉中心旋轉得到3的目標點的不是真正的機械坐標系的坐標P1,P2,P3,必須讓每次旋轉的目標點在視野范圍內,然后通過圓弧上的3點就可以求得圓心。此時的圓心坐標為不是真正的機械坐標系的坐標。然后我們就可以求出產品中心和機械手U軸旋轉中心的deltaX,deltaY,然后就可以結合真正的機械坐標系建立工件坐標系,要對機械手有些了解才比較好理解這些拗口的話!然后對于每一個新的產品都可以建立合適的工件坐標系,然后進行補正和一些操作!
相機跟隨著機械手運動(它們綁定在一起了),如果還將標定靶標也固定在機械手上的話,三個對象都相對運動,就無法標定了!那要怎么利用標定助手完成標定呢?經過思考,我給出了以下標定思路:
整個標定系統的初始狀態
相機和機械手綁定在一起并且機械手旋轉中心處于機械原點,這時候相機中心和機械手中心有一個相對的偏移并且是固定的(相機中心和機械手旋轉中心的相對距離設為(detX,detY)),將標定靶標放置在工作區域(實際機械手的工作區域)中的合適位置。
第一步:求取第一組圖像點坐標C1
移動機械手(相機會跟著移動)到相機能夠清晰拍攝到標定靶標的位置(設該位置的機械坐標為(x0,y0))。然后調整標定靶標的識別參數,使得能夠實時的識別標定靶標的中心位置,手動移動靶標最好讓它遠離圖像中心,越遠越好(精度越高)但是不能超出相機的視野范圍,我就把靶標放在相機視野的左上角的區域吧,然后我們識別當前靶標的圖像位置C1,就是第一組數據的圖像點。
第二步:求取第一組機械點坐標M1
進入“標定”選項卡,勾選“顯示十字標”,這時候會在實時圖像中間顯示一個藍色的十字光標,然后,慢速移動機械手,直到C1點和十字光標的交點重合(也就是說移動機械手讓實時識別到的靶標中心坐標處于圖像的中心,比如采集的圖像為2048*1536大小的,你需要緩慢移動機械手(靶標保持不動)直到靶標的中心處于(1024,768)的這個位置),然后記下當前的機械手坐標也就是第一組數據的機械點M1(注意:此時實際是讓相機中心和靶標中心重合,并非機械手旋轉中心和靶標中心重合,它們之間差了一個detX,detY的距離,具體怎么換算,等下再說)。
第三步:求取第二組圖像點坐標C2
將機械手移動回到初始的工作坐標點(x0,y0),將靶標放在相機視野的右下角的區域,識別當前的靶標圖像坐標C2,就是第二組數據的圖像點。
第四步:求取第二組機械點坐標M2
同理,慢速移動機械手,直到C2點和十字光標的交點重合(就是移動機械手讓實時識別到的靶標中心坐標處于圖像的中心),然后記下當前的機械手坐標也就是第二組數據的機械點M2。
第五步:求取整個機械手工作區域坐標系和相機坐標系的對應關系
不知道你有沒有發現,上面求得工作區域只對工作區域(x0,y0)開始到相機視野結束的位置有效(比如你在機械手移動到工作區域(x0,y0)為起點的位置識別靶標的圖像位置坐標為(100,100),但是你將機械手移動到工作區域(x1,y1)為起點的位置識別靶標的圖像位置坐標也可能為(100,100))。這樣換算過來的機械坐標就是錯誤的,其實我們上面求得是小區域的轉換關系,那我們要怎么擴展到整個機械手的工作區域呢?
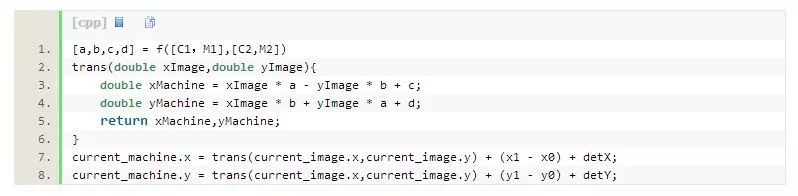
我們只需要這樣做:在機械手工作的時候是可以知道自己在哪里的,比如:現在機械手移動到工作區域(x1,y1)為起點的位置識別靶標的圖像位置坐標為(100,100),我們將(100,100)代入轉換關系trans得出來的機械坐標是對應(x0,y0)的,要轉換到對應(x1,y1)的只需要將換算處理的坐標加上(x1 - x0,y1 - y0)即可!抽象的公式如下:

其中trans函數就是將圖像坐標轉換為相對于(x0,y0)工作區域的機械坐標,再加上坐標(x1 - x0,y1 - y0)就是當前正確的機械坐標。到此,我們得到了圖像坐標和整個機械手工作區域的坐標的關系,但是此時的機械坐標指的是相機的中心,并不是機械手的旋轉中心。
第六步:將相機中心轉換為機械手的旋轉中心
首先,你可以利用目測法,游標卡尺法等等粗略的算出detX,detY的值,然后,進行實時識別和移動測試進行細調,因為粗略的估算有誤差,你可以經過多次微調直到精確到機械手的旋轉中心移動到產品的上方就成功了。記下此時的detX,detY,代入以下公式就可以算出了最終的機械手應該去的地方了。最終的換算公式如下:

整個過程的偽代碼運算過程如下:
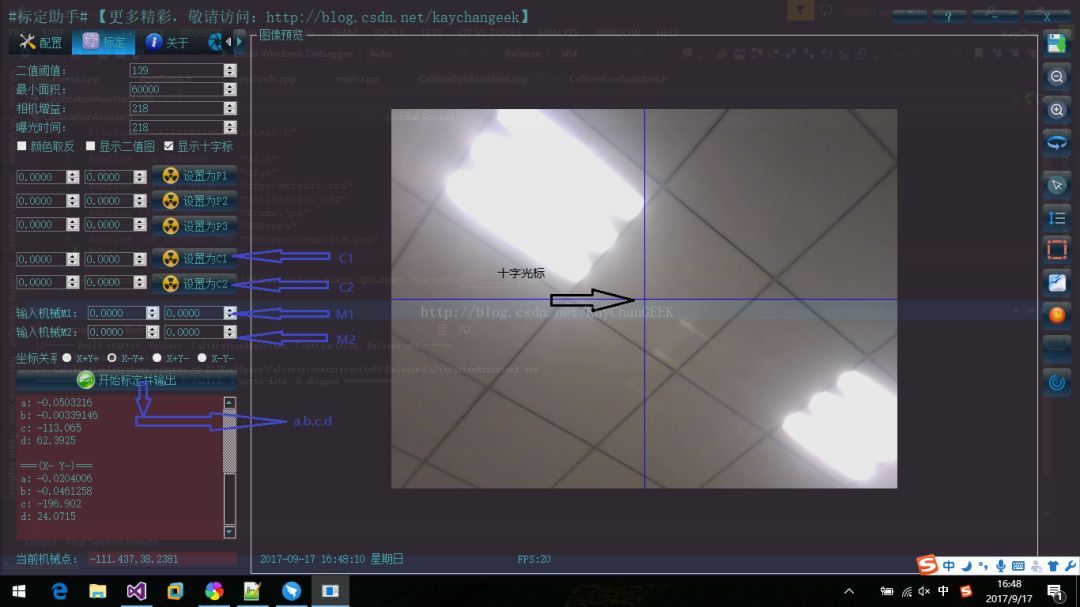
利用標定助手求取[a,b,c,d]外參矩陣的輸入參數[C1,M1]和[C2,M2]的操作方法如下圖所示:
審核編輯:劉清
-
工業相機
+關注
關注
5文章
357瀏覽量
24419
原文標題:工業現場相機坐標系和機械手坐標系的標定
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
電機矢量控制中坐標變換的詳細推導(可下載)
LSM6DSV16X內置的傳感器融合算法SFLP,輸出的四元數是自身坐標系下的還是全局坐標系下的?

電機矢量控制分析方法介紹

FRED應用:偏振分色顯示空間光譜分布
偏振分析器
Chart FX——坐標軸簡介

三坐標測量機的工作原理 三坐標測量機在質量控制中的應用
偏振分色
機械手 OEM 的應用
【原創】 drawbot 平面機械臂scara寫字畫畫機器人DIY教程貼
abb機器人工具坐標系問題
機器視覺控制機械手的具體過程
橋式三坐標測量機和影像測量三坐標介紹






 工商網監
工商網監
評論