") 移動字符串的規(guī)則
移動字符串的規(guī)則
BLKMOV:存儲區(qū)移動(SFC20)
使用“塊移動”指令,可將存儲區(qū)(源區(qū)域)的內容移動到其它存儲區(qū)(目標區(qū)域)。移動操作沿地址升序方向執(zhí)行。可使用 ANY 指針定義源區(qū)域和目標區(qū)域。
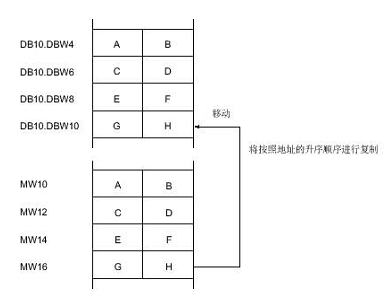
移動操作的通用規(guī)則
源區(qū)域和目標區(qū)域不得重疊。如果源和目標區(qū)域長度不同,則只能移動較小長度的區(qū)域。
如果源區(qū)域小于目標區(qū)域,則將整個源區(qū)域的數(shù)據(jù)都寫入到目標區(qū)域中。而目標區(qū)域的其余字節(jié)則保持不變。
如果目標區(qū)域小于源區(qū)域,將寫滿整個目標區(qū)域。而忽略源區(qū)域的剩余字節(jié)。
如果復制 BOOL 數(shù)據(jù)類型的區(qū)域,則此區(qū)域的指定長度必須是 8 的整數(shù)倍,否則將無法執(zhí)行指令。
移動字符串的規(guī)則
還可以使用“塊移動”指令移動 STRING 數(shù)據(jù)類型的源區(qū)域和目標區(qū)域。如果只有源區(qū)域為 STRING 數(shù)據(jù)類型,則移動字符串中實際包含的字符。有關實際和最大長度的信息,將寫入目標區(qū)域。如果源和目標區(qū)域都是 STRING 數(shù)據(jù)類型,則將目標區(qū)域中字符串的當前長度設置為實際移動的字符數(shù)。
如果要移動字符串實際長度和最大長度的信息,則需要以字節(jié)為單位將相關區(qū)域指定給 SRCBLK 和DSTBLK 參數(shù)。
函數(shù)值 (RET_VAL) INT 錯誤信息
0000 無錯誤
8092 源或目標區(qū)域只能在裝載存儲器中。
8xyy 有關錯誤的更多信息,
使用復雜參數(shù)類型ANY:
STEP 7以10個字節(jié)存儲參數(shù)類型ANY。當構造類型為ANY的參數(shù)時,必須確保所有10個字節(jié)都被占用,因為調用塊估計參數(shù)整個內容的值。例如,如果以字節(jié)4指定DB編號,也必須以字節(jié)6明確地指定存儲器區(qū)。
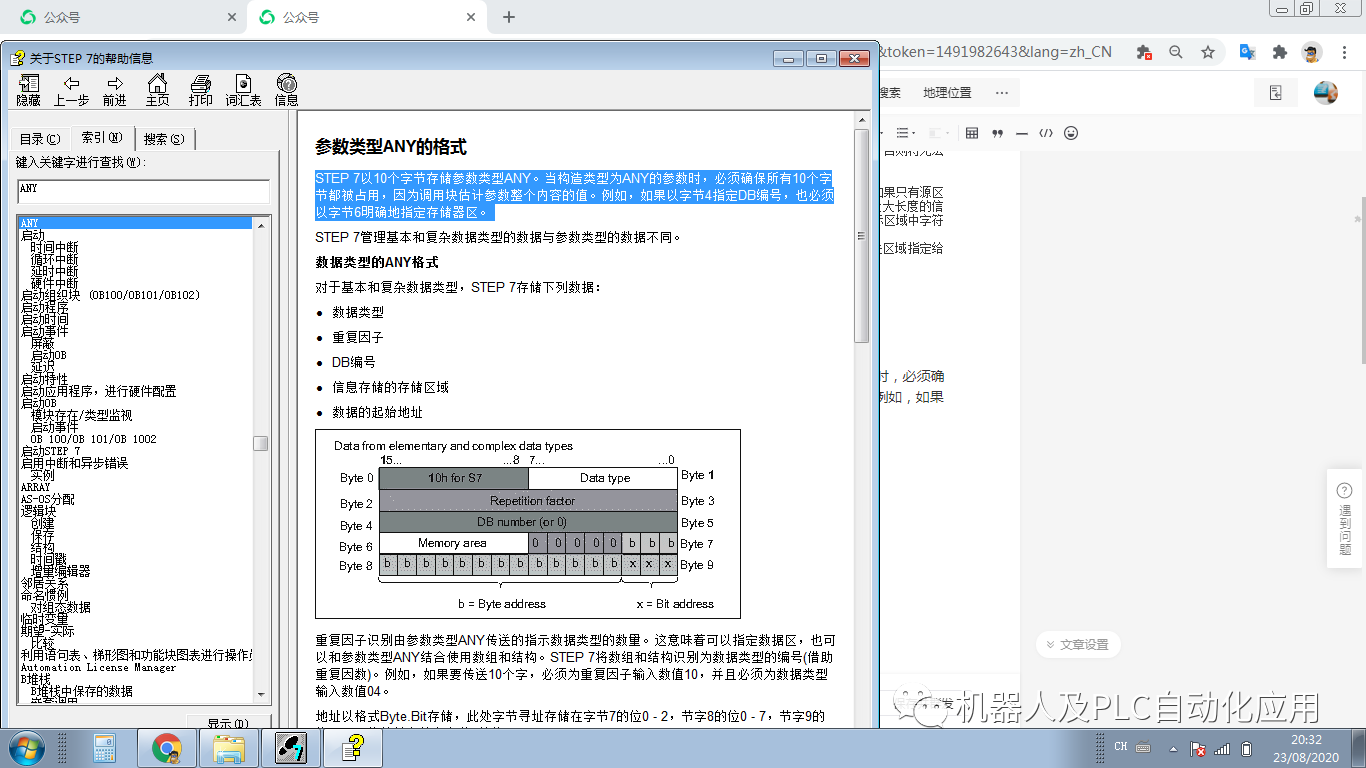
參數(shù)類型的ANY格式
對于參數(shù)類型,STEP 7存儲數(shù)據(jù)類型和參數(shù)的地址。重復因子始終是1。字節(jié)4、5和7始終是0。字節(jié)8和9指示定時器、計數(shù)器或塊的編號。
重復因子識別由參數(shù)類型ANY傳送的指示數(shù)據(jù)類型的數(shù)量。這意味著可以指定數(shù)據(jù)區(qū),也可以和參數(shù)類型ANY結合使用數(shù)組和結構。STEP 7將數(shù)組和結構識別為數(shù)據(jù)類型的編號(借助重復因數(shù))。例如,如果要傳送10個字,必須為重復因子輸入數(shù)值10,并且必須為數(shù)據(jù)類型輸入數(shù)值04。
地址以格式Byte.Bit存儲,此處字節(jié)尋址存儲在字節(jié)7的位0 - 2,節(jié)字8的位0 - 7,節(jié)字9的位3 - 7。位地址存儲在字節(jié)9的位0 - 2。
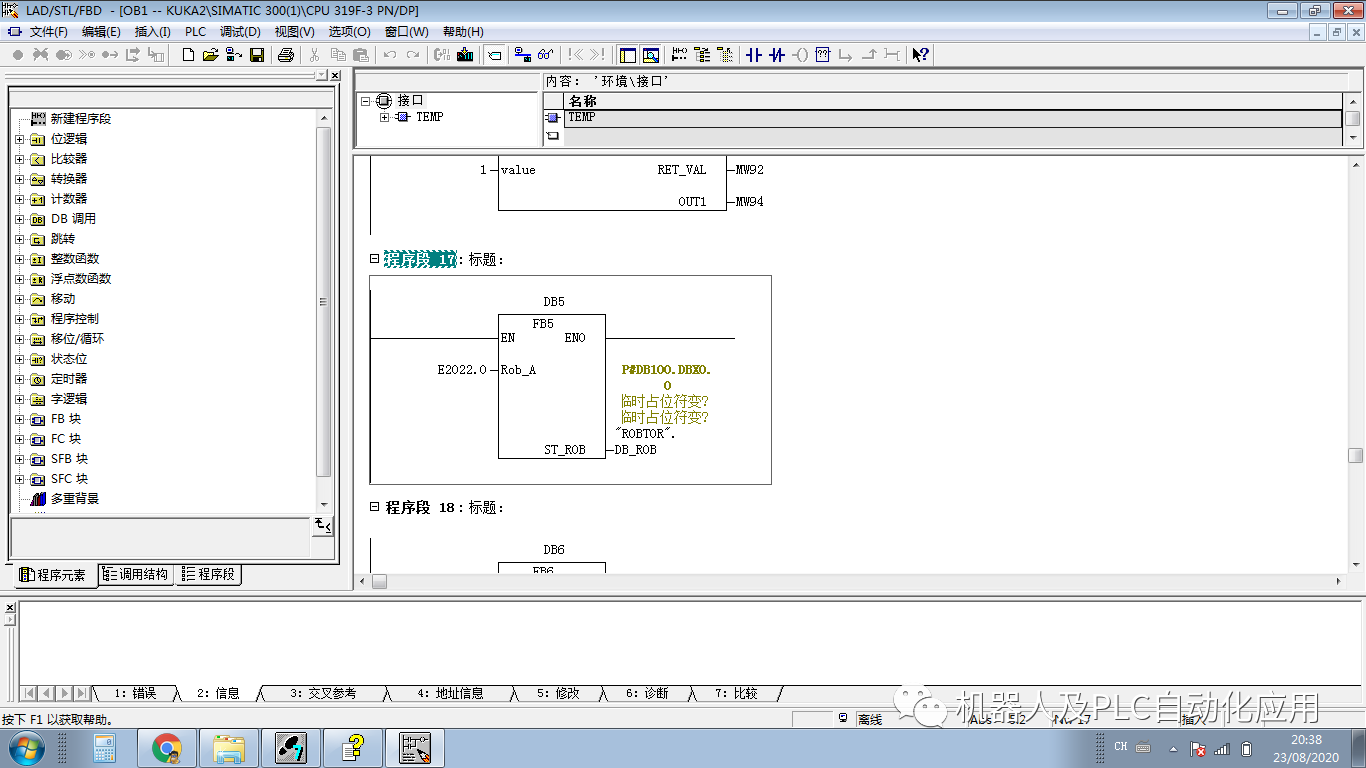
FUNCTION_BLOCK FB5
VAR_INPUT
Rob_A:POINTER; 機器人的地址
pRobAAT Rob_A: STRUCT 拆分地址
DBNR :WORD;
BZ :DWORD;
END_STRUCT;
END_VAR
VAR_OUTPUT
ST_ROB: ST_Rob;
END_VAR
VAR_TEMP
Adr_Rob_A :INT ;
AnyRob_A :ANY;
pRob_AAT AnyRob_A: STRUCT
SyntaxId:BYTE; // Byte 0
DataType:BYTE; // Byte 1
DataCount:WORD; // Byte 2+3
DBNR :WORD; // Byte 4+5
BZ :DWORD;// Byte 6
END_STRUCT;
AnyST_ROB :ANY;
pST_ROBAT AnyST_ROB: STRUCT
SyntaxId: BYTE; // Byte 0
DataType: BYTE; // Byte 1
DataCount:WORD; // Byte 2+3
DBNR :WORD; // Byte 4+5
BZ :DWORD; // Byte 6
END_STRUCT;
AnyST_ROB_A_Rob:ANY;
pST_ROB_A_RobAT AnyST_ROB_A_Rob: STRUCT
SyntaxId: BYTE; // Byte 0
DataType: BYTE; // Byte 1
DataCount:WORD; // Byte 2+3
DBNR :WORD; // Byte 4+5
BZ :DWORD; // Byte 6
END_STRUCT;
erg_SFC20 :INT;用于SFC20的變量反饋點
END_VAR
VAR
END_VAR
Adr_Rob_A := WORD_TO_INT(DWORD_TO_WORD(SHR(IN:=pRobA.BZ,N:=3))); 提取IO點地址
pRob_A.SyntaxId := B#16#10;
pRob_A.DataType := 02;
pRob_A.DataCount := W#16#22;
pRob_A.DBNR := pRobA.DBNR;
pRob_A.BZ := pRobA.BZ;
AnyST_ROB := ST_ROB.A1_8_Folgespiegelung;DB塊首位
pST_ROB.SyntaxId := B#16#10;
pST_ROB.DataType := 02;
pST_ROB.DataCount := W#16#22;
AnyST_ROB_A_Rob := ST_ROB.A_Rob;
pST_ROB_A_Rob.SyntaxId := B#16#10;
pST_ROB_A_Rob.DataType := 02;
pST_ROB_A_Rob.DataCount := W#16#22;
erg_SFC20 := BLKMOV(SRCBLK := AnyRob_A
,DSTBLK:= AnyST_ROB
);傳輸機器人的輸出狀態(tài)
erg_SFC20 := BLKMOV(SRCBLK := AnyST_ROB
,DSTBLK:= AnyST_ROB_A_Rob
);
END_FUNCTION_BLOCK
-
數(shù)據(jù)
+關注
關注
8文章
7246瀏覽量
91179 -
存儲
+關注
關注
13文章
4507瀏覽量
87117 -
定時器
+關注
關注
23文章
3289瀏覽量
117348
原文標題:使用復雜參數(shù)類型
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄





 工商網監(jiān)
工商網監(jiān)
評論