") EDA 式驗證方法會增強自動駕駛汽車的安全性嗎?
EDA 式驗證方法會增強自動駕駛汽車的安全性嗎?
復(fù)雜的系統(tǒng)——無論是片上系統(tǒng)還是自動駕駛汽車——都會讓設(shè)計工程師感到沮喪,他們經(jīng)過數(shù)月的艱苦工作,不得不回去驗證他們剛剛設(shè)計的系統(tǒng)是否真的按照他們的預(yù)期方式運行。
SoC 和自動駕駛汽車 (AV) 都內(nèi)置在一個“黑匣子”中,從本質(zhì)上講,這使得很難找到“隱藏在你沒有想到的地方”的錯誤,a 首席執(zhí)行官兼聯(lián)合創(chuàng)始人 Ziv Binyamini 說。位于特拉維夫的初創(chuàng)公司 Foretellix。
在測試和驗證 SoC 時,有兩個措施被認為是必不可少的:“代碼覆蓋率”,它說明代碼通過激勵測試的效果,以及“功能覆蓋率”,一種讓用戶編寫某些儀器邏輯來監(jiān)控刺激涵蓋各種功能。
Foretellix 認為,當(dāng)汽車 OEM 測試安全性時,類似的覆蓋驅(qū)動規(guī)則應(yīng)該適用于 AV。
今天,來自科技公司和原始設(shè)備制造商的車輛在模擬、測試軌道和公共道路上進行了數(shù)百萬英里的測試。例如,上個月,Waymo 宣布該公司已經(jīng)行駛了超過 1000 萬英里的街道里程和大約 100 億英里的模擬里程。
但問題是:

齊夫·賓亞米尼
有誰知道 Waymo、Uber、Cruise 和 Argo AI 等公司到底在測試什么?他們?nèi)绾魏饬繙y試結(jié)果?他們的 AV 經(jīng)歷了哪些測試場景?
正如 Foretellix 的 Binyamini 所看到的那樣,當(dāng)今 AV 公司之間以里程為導(dǎo)向的競賽——希望證明其產(chǎn)品的安全性——缺乏“一種可量化的方法來衡量證明自動駕駛汽車安全所需的場景已經(jīng)執(zhí)行了多少(覆蓋)。”
此外,他們?nèi)狈梢浴疤峁┮环N嚴格和自動化的方式來發(fā)現(xiàn)未知風(fēng)險場景并將其變?yōu)橐阎墓ぞ撸彼赋觥?/p>
這就是 Foretellix 看到機會的地方。Foretellix 基于在 EDA 行業(yè)長大的驗證專家團隊,正在將其專業(yè)知識遷移到 AV 世界。
例如,正如幾十年前 EDA 行業(yè)為 SoC 設(shè)計人員開發(fā)了一種稱為 SystemVerilog 的高級硬件描述和硬件驗證語言一樣,Binyamini 告訴 EE Times,F(xiàn)oretellix 正在為 AV 系統(tǒng)設(shè)計人員開發(fā)可測量的場景描述語言 (M-SDL)。
據(jù) Foretellix 稱,目前美國和歐洲的一些汽車 OEM 正在“試用”M-SDL。Binyamini 表示,在將行業(yè)反饋整合到語言中后,目前的計劃是在夏季之后發(fā)布。他還強調(diào),M-SDL 不是專有的。“這將在 GitHub 上公開。”
Foretellix 承諾 M-SDL 將提供測試結(jié)果的“統(tǒng)一指標(biāo)”——無論是在模擬、測試課程還是在路上完成。“我們還在注入隨機測試,看看哪些場景還需要測試。”
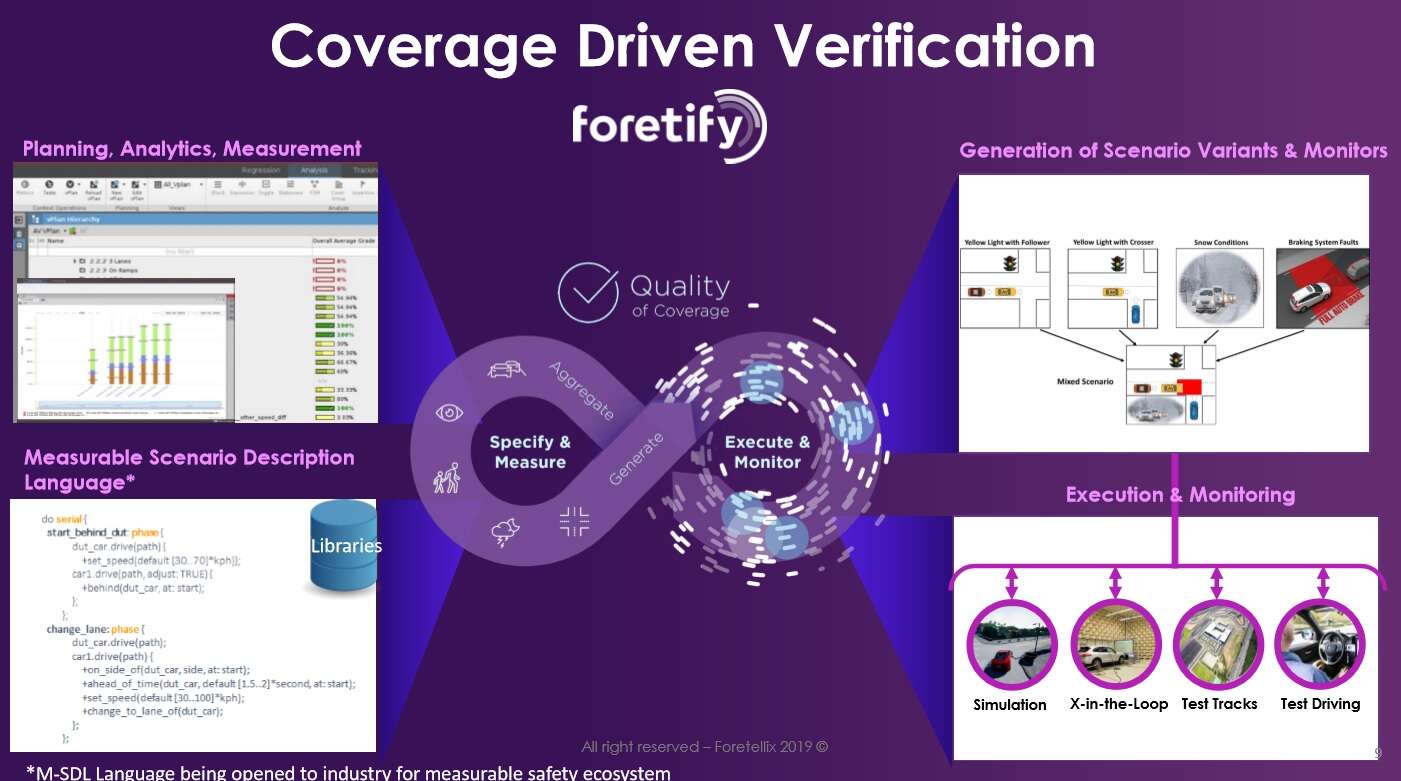
覆蓋驅(qū)動驗證(來源:Foretellix)
EDA 和汽車世界的聯(lián)系
The Linley Group 的高級分析師 Mike Demler 警告說,F(xiàn)oretellix 并沒有為 AV 系統(tǒng)設(shè)計構(gòu)建驗證工具。相反,它為自動駕駛汽車提出了“覆蓋分析工具和覆蓋驅(qū)動的驗證”,他指出。
Demler 承認“覆蓋驅(qū)動驗證”的概念來自 EDA,但強調(diào)“覆蓋是檢查驗證計劃的工具,但它本身并不是驗證工具。覆蓋率工具檢查您的測試臺是否覆蓋了所有可能的故障,或者是否有足夠的數(shù)量來滿足特定的簽核標(biāo)準(zhǔn)。”
因此,在 Demler 看來,F(xiàn)oretellix 將 M-SDL 與 SystemVerilog 進行比較是“一個很大的延伸”。他說,這看起來更像是“一個測試計劃檢查器”。
盡管如此,F(xiàn)oretellix 創(chuàng)始人的背景強烈表明,在半導(dǎo)體行業(yè)中根深蒂固的技術(shù)正是 Foretellix 現(xiàn)在正試圖為汽車行業(yè)帶來的技術(shù)。
奔騰臨
對于任何經(jīng)歷過芯片設(shè)計日益復(fù)雜的時代的人來說,自動駕駛汽車中出現(xiàn)的設(shè)計幾乎是熟悉的。Binyamini 觀察到,“這些都是 1990 年代芯片行業(yè)已經(jīng)遇到的問題。”
在英特爾開發(fā) Pentium Pro 時,Binyamini 是 P6 項目的設(shè)計自動化工程師。因為 P6 設(shè)計是第一個 X86 超級流水線、亂序推測執(zhí)行機器,所以處理器“極其復(fù)雜”。它需要新的驗證解決方案來處理這種復(fù)雜性。”
在 P6 發(fā)布之前,英特爾面臨著“奔騰漏洞”危機,這是英特爾早期處理器中的浮點缺陷。該漏洞由林奇伯格學(xué)院的一位教授于 1994 年發(fā)現(xiàn),EE Times 報道了該漏洞。到 1994 年 12 月,英特爾以近 10 億美元的成本召回了有缺陷的處理器。這一事件使電子行業(yè)意識到幾乎不可能找到復(fù)雜處理器中的所有錯誤和問題。
到 1997 年,Binyamini 加入了一家名為 Verisity 的初創(chuàng)公司,該公司由 VLSI 驗證領(lǐng)域的領(lǐng)先專家 Yoav Hollander 于 1995 年創(chuàng)立。Verisity 被稱為世界上最早的驗證公司之一,其任務(wù)是提供基于覆蓋驅(qū)動方法的 VLSI 驗證工具套件。
Verisity 告訴半導(dǎo)體行業(yè),覆蓋驅(qū)動的驗證“是處理芯片設(shè)計復(fù)雜性的唯一方法”。在 Verisity,Hollander 創(chuàng)建了“e”驗證語言,該語言后來成為標(biāo)準(zhǔn) (IEEE 1647)。
審核編輯 黃昊宇
-
eda
+關(guān)注
關(guān)注
71文章
2904瀏覽量
176762 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14245瀏覽量
169925
發(fā)布評論請先 登錄
自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
NVIDIA Halos自動駕駛汽車安全系統(tǒng)發(fā)布
面向L3+自動駕駛:三星電機車規(guī)電容如何提升新能源汽車的可靠性和安全性

自動駕駛的未來 - 了解如何無縫、可靠地完成駕駛

AUTOSAR通信對自動駕駛的影響 AUTOSAR通信與嵌入式系統(tǒng)設(shè)計
MEMS技術(shù)在自動駕駛汽車中的應(yīng)用
汽車雷達回波發(fā)生器的技術(shù)原理和應(yīng)用場景
Apollo自動駕駛開放平臺10.0版即將全球發(fā)布
自動駕駛汽車安全嗎?

基于場景的自動駕駛驗證策略






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論