") 如何實現(xiàn)更高效的VLN算法
如何實現(xiàn)更高效的VLN算法
視覺-語言導航任務(Vision-Language Navigation, VLN)是指在陌生環(huán)境中,無人系統(tǒng)依據(jù)語言指示和觀測圖像之間的跨模態(tài)匹配信息,進行自主智能路徑導航的方法。不同于前進、后退等簡單操控指令,VLN采用類似人人交互的語言指示,比如“走出右側大門,穿過臥室和客廳,在綠色地毯上的餐桌旁停下”。VLN是一種新型的跨模態(tài)智能人機交互方法,能夠極大地提升無人系統(tǒng)的自主能力,能夠為無人系統(tǒng)走向?qū)嵱锰峁╆P鍵技術支撐。
序列到序列(Sequence to Sequence, Seq2Seq)模型是VLN最常見的模型之一。Seq2Seq首先對語言指令進行序列編碼,再根據(jù)逐步觀測的視覺圖像,進行序列移動方向預測解碼,從而實現(xiàn)智能導航。最新的研究表明:在解碼時,利用Beam-Search進行多條路徑探索,通過路徑評價函數(shù)獲得最優(yōu)導航路徑,可以獲得更好的導航精度。但現(xiàn)有工作使用的路徑評價函數(shù)是由局部方向選擇算子組合構建的,在全局多條路徑對比上能力不足,可能會出現(xiàn)嚴重偏差,如圖1。
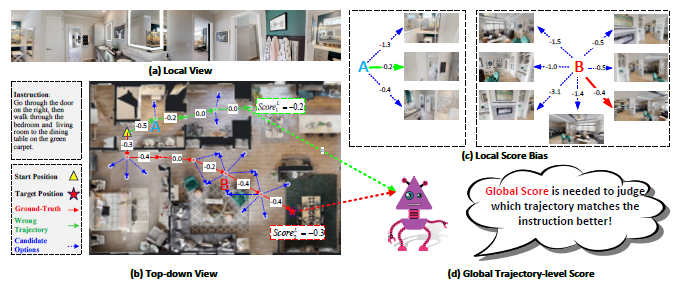
圖1 VLN分數(shù)偏差問題示例
為了解決該問題,軍事科學院國防科技創(chuàng)新研究院智能人機交互團隊設計了新型全局路徑評估函數(shù),提出了一種全局對比訓練的策略,大幅提升了VLN的導航精度。相關論文《Vision-Language Navigation with Beam-Constrained Global Normalization》已被國際知名期刊 IEEE Transactions on Neural Networks and Learning Systems錄用;該論文在提交時,算法性能在公開VLN數(shù)據(jù)集R2R(Room-to-Room)上排名第一。

榜單地址:https://eval.ai/web/challenges/challenge-page/97/leaderboard/270
主要工作與貢獻該論文提出了一種基于全局對比訓練的視覺-語言導航方法,可以對候選路徑進行跨模態(tài)全局匹配評估。不同于傳統(tǒng)方法,該論文主要聚集在如何利用正確路徑和錯誤路徑進行對比訓練,獲得較優(yōu)的全局語言-路徑匹配評估函數(shù),有效提升VLN的導航精度。論文算法框架可以分為兩個部分:(1)Baseline:Seq2Seq模型,基于局部訓練的序列動作預測,用于訓練語言-路徑匹配的局部評估函數(shù);(2)全局對比訓練模型:基于全局對比訓練的全局評估函數(shù)。在測試時,將局部評估函數(shù)和全局評估函數(shù)進行結合,實現(xiàn)高精度的導航路徑預測,如圖2所示。
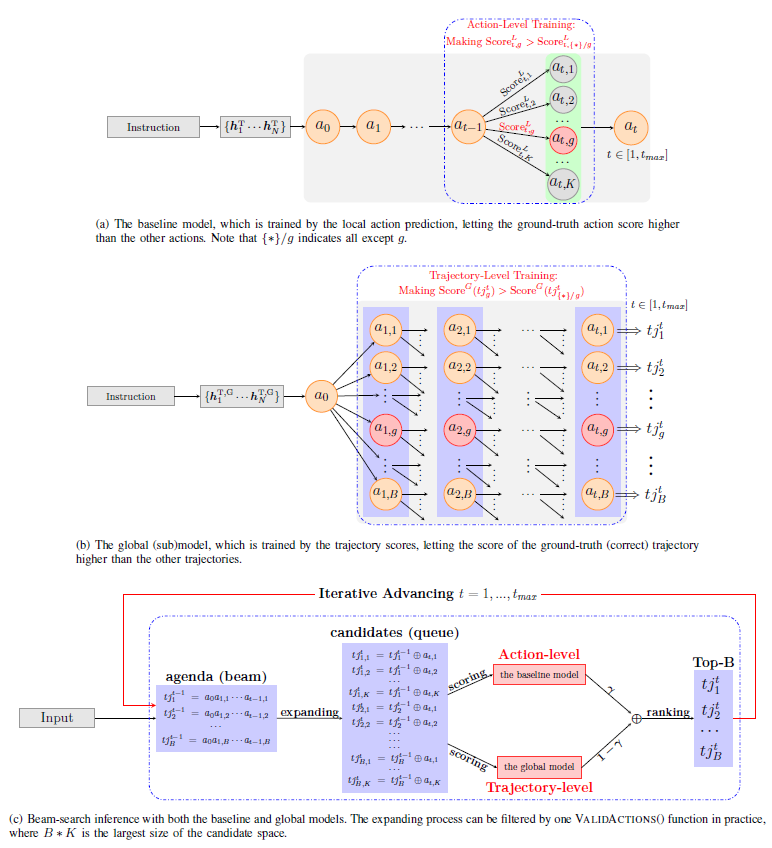
圖2 基于全局對比訓練的VLN框架
A Baseline 如圖2所示,該論文選擇Seq2Seq模型作為Baseline,首先將語言信息進行編碼,再基于視覺信息進行動作預測解碼。語言編碼:利用LSTM對輸入的自然語言文本進行編碼,獲得文本指令的特征向量。視覺編碼:利用ResNet-152對觀測圖像進行特征提取,結合運動方向特征進行視覺編碼。動作預測:采用Seq2Seq模型進行動作解碼,獲得序列導航動作。進度監(jiān)視器:作為一項必不可少的輔助推理任務,進度監(jiān)視器可以提供來自環(huán)境的額外訓練信息。訓練:局部對比訓練,只考慮當前環(huán)境及下一步動作。局部評估函數(shù):通過將局部方向選擇概率值累加,獲得整個路徑與描述語言的匹配度。B 基于Beam-Search的全局對比訓練策略
Baseline將一個路徑的匹配度計算分解為單步方向選擇得分累加,由于單步方向得分是單獨計算的,沒有明確涵蓋全局信息,因此將Baseline評估函數(shù)稱為局部評估函數(shù)。由于局部評估函數(shù)沒有從全局視角考慮路徑和語言的匹配度,所以局部得分累加的方式容易出現(xiàn)匹配錯誤,為了緩解這一問題,本文提出了明確的全局匹配評估函數(shù),并設計了全局訓練策略進行優(yōu)化訓練,從而獲得高效的全局匹配評估函數(shù)。
具體來說,本文訓練了一個全局評估子模型,主要用來進行路徑-語言全局匹配評估,從而使得不同路徑的評估得分更加具有可比性。
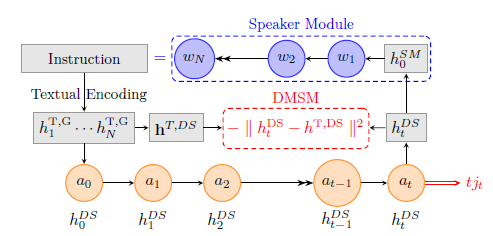
圖3 深度多模態(tài)相似性模塊和speaker模塊示意圖
DMSM模塊:計算語言的整體描述特征與路徑視覺的整體描述特征之間的距離;距離越近,則路徑和語言越匹配。Speaker模塊:根據(jù)路徑反向生成指令語言的概率,是VLN的逆命題,可以反映全局路徑和語言的匹配度。全局對比訓練:在訓練時,利用Beam-Search搜索出多條正確路徑和多條錯誤路徑,設計對比損失函數(shù),使得正確路徑得分高于錯誤路徑,可以有效地對全局評估模塊DMSM和Speaker模塊進行訓練。全局評估函數(shù):在測試時,對于任意一對路徑和語言,分別利用DMSM和Speaker模塊對二者之間的匹配度進行計算,通過線性疊加,可以獲得該路徑的全局評估得分。
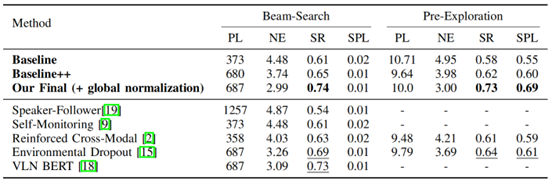
實驗結果算法的測試是在VLN公開數(shù)據(jù)集上進行的。本文對比了多個現(xiàn)有經(jīng)典VLN算法,實驗結果表明,本文提出的算法導航精度比Baseline高出13%,顯著度較高;在同期VLN算法的導航精度最高,證明了本文算法的有效性。
總結與展望本研究提出了一種 VLN 全局對比訓練方法,用于緩解現(xiàn)有局部評估函數(shù)在全局路徑-語言匹配評估方面的不足。該方法核心要點是如何從錯誤路徑/負樣本中學到有用的信息,這是現(xiàn)有其他VLN算法關注較少的地方,也是本文的落腳點,實驗結果表明了本文方法的有效性。
最近,通過視覺-語言跨模態(tài)預訓練模型在VLN中性能表現(xiàn)優(yōu)越,比如VLN BERT,相對于傳統(tǒng)LSTM模型,預訓練能夠獲得更多的先驗知識,能夠為VLN提供更魯棒的基礎框架,本文未來工作將在VLN BERT等預訓練模型的基礎上,進一步利用全局對比訓練方法,實現(xiàn)更高效的VLN算法。
原文標題:VLN: 基于全局對比訓練的視覺-語言導航方法
文章出處:【微信公眾號:深度學習自然語言處理】歡迎添加關注!文章轉載請注明出處。
-
智能導航
+關注
關注
0文章
25瀏覽量
10065 -
函數(shù)
+關注
關注
3文章
4368瀏覽量
64181 -
訓練模型
+關注
關注
1文章
37瀏覽量
3935
原文標題:VLN: 基于全局對比訓練的視覺-語言導航方法
文章出處:【微信號:zenRRan,微信公眾號:深度學習自然語言處理】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
中偉視界:解密AI智能攝像機算法,讓傳送帶跑偏檢測更高效!

PID控制算法的C語言實現(xiàn):PID算法原理

【「從算法到電路—數(shù)字芯片算法的電路實現(xiàn)」閱讀體驗】+內(nèi)容簡介
【「從算法到電路—數(shù)字芯片算法的電路實現(xiàn)」閱讀體驗】+介紹基礎硬件算法模塊
【「從算法到電路—數(shù)字芯片算法的電路實現(xiàn)」閱讀體驗】+一本介紹基礎硬件算法模塊實現(xiàn)的好書
盛顯科技:拼接處理器如何實現(xiàn)高效數(shù)據(jù)拼接操作?

PD快充芯片U8724AH集成實現(xiàn)更高效的電源系統(tǒng)管理

使用qboot時選擇了壓縮率更高的zip算法,但是發(fā)現(xiàn)編譯報錯,為什么?
智能升級,樓宇自控系統(tǒng)讓辦公更高效
GaN如何實現(xiàn)更高效、更緊湊的電源

充電也要算法?儲能充電芯片中的算法處理器
如何使用PyTorch構建更高效的人工智能
STM32如何詮釋電機控制創(chuàng)新 如何更高效更智能






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論