") 基于無人機激光雷達的刺槐人工林森林健康指標的構(gòu)建
基于無人機激光雷達的刺槐人工林森林健康指標的構(gòu)建

1研究區(qū)概況
黃河三角洲位于渤海灣南岸和萊州灣西岸,主要分布在中國山東省東營市和濱州市境內(nèi),屬暖溫帶半濕潤大陸性季風(fēng)氣候,年平均氣溫11.7~12.6℃,日照充足,雨熱同期。該地區(qū)土壤以濱海鹽土和濱海潮土為主,養(yǎng)分含量低,且鹽漬化嚴重,不利于喬木生長。自20世紀80年代以來,刺槐作為主要的造林樹種在該地區(qū)廣泛種植,逐漸形成以孤島、軍馬場、黃河故道和大汶流自然保護區(qū)4個林場為主體的種植區(qū)。本研究以孤島林場為研究區(qū)(圖1)。
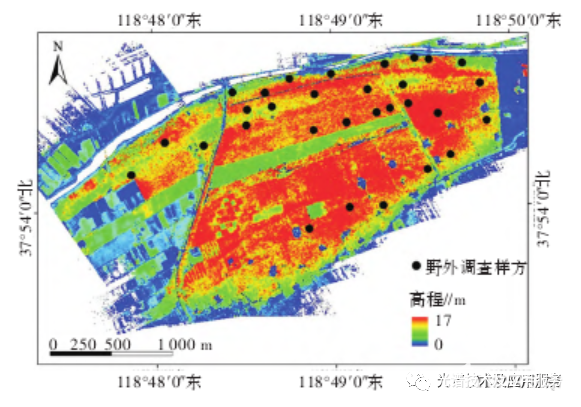
圖1研究區(qū)及樣方分布(以LiDAR數(shù)據(jù)為背景)
2材料與方法
2.1數(shù)據(jù),
2.1.1野外生態(tài)調(diào)查數(shù)據(jù)
本研究于2017年6月、2019年6月和2019年10月共獲取了30個野外調(diào)查樣方。根據(jù)兩級采樣設(shè)計原則,在30m×30m的樣方的4個角和中心布置了5個10m×10m的次樣方。利用GPS記錄每個樣方的位置。根據(jù)美國林業(yè)局樹冠狀況分類指南對樣方進行健康分級,具體方法如下:在5個次樣方中選擇1個標準木材評估5個樹冠活力指標,分別為活冠比、冠幅、郁閉度、林冠枯梢率、樹葉透光度(表1),取5個次樣方指標的平均值作為樣方的指標值,最后根據(jù)森林健康等級判斷規(guī)則(表2)得到樣方的健康等級。30個樣方被分為3類,包括14個健康樣方、10個亞健康樣方和6個不健康樣方。
2.1.2無人機LiDAR數(shù)據(jù)
本研究于2017年6月采集了黃河三角洲孤島林場區(qū)域的無人機LiDAR數(shù)據(jù)。無人機上搭載激光掃描儀、IMU(Inertialmeasurementunit)和GPS(Globalposi?tionsystem),飛行高度為120m,飛行速度為4.8m/s,巡航半徑為2km。激光波長采用近紅外波段,光斑直徑約為50mm,獲取的平均點密度為40個/m2,采用WGS84坐標系和UTM投影。
2.2LiDAR數(shù)據(jù)預(yù)處理
首先采用基于統(tǒng)計的點云去噪方法(Statisticaloutlierremoval)對原始的無人機LiDAR數(shù)據(jù)進行去噪。然后通過改進的漸進三角網(wǎng)加密算法(IPTD)對去噪后的LiDAR點云進行濾波,將點云分為地面點和非地面點。利用地面點插值生成數(shù)字地形模型DTM,并用DTM對點云數(shù)據(jù)進行歸一化消除地形的影響。再利用歸一化后的點云生成數(shù)字表面模型DSM,減去DTM得到冠層高度模型CHM。本研究為了獲取詳細的冠層變化,將CHM的空間分辨率設(shè)置為1m2。
2.3LiDAR特征變量提取
2.3.1垂直方向的變量
本研究的垂直變量分為2個部分,包括基于歸一化LiDAR點云中提取的特征變量和基于冠層垂直剖面提取的特征變量。基于點云提取的變量包括3個。高度百分位數(shù)(H99)是所有回波點按高度排序后,99%的點云所在的高度,可以從整體上反映樣方內(nèi)樹木的高度。垂直復(fù)雜度(VCI)可以量化點云的垂直分布,其數(shù)值區(qū)間為0~1,0表示點云在垂直方向上分布不均勻,1表示分布均勻,公式為:
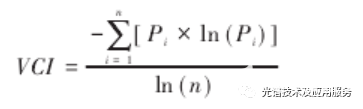
式中,n為垂直方向上劃分的高度層數(shù),Pi為每個高程層中點云占點云總數(shù)的比例(%)。葉面積密度的變異系數(shù)(LADcv)可以反映冠層內(nèi)葉面積指數(shù)隨高度變化的變異情況,公式為:
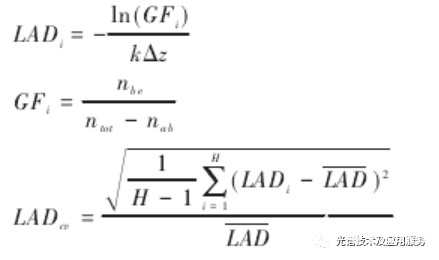
式中,H為垂直方向劃分的高度層數(shù),GF為間隙率,k為消光系數(shù),nab為第i個高度層以上的點云數(shù)量,nbe為第i個高度層以下的點云數(shù)量,ntot為點云總數(shù)。冠層垂直剖面可以反映包括枝葉在內(nèi)的整個樹冠在垂直方向上的點云密度分布情況,由某一高度層的點云與點云總數(shù)的比值表示。本研究采用Weibull密度函數(shù)擬合冠層垂直剖面,以獲取尺度參數(shù)α(weibull_α)和形狀參數(shù)β(weibull_β),公式為:

式中,f(x)是點云密度,x是高度百分位數(shù)。
2.3.2水平方向的變量
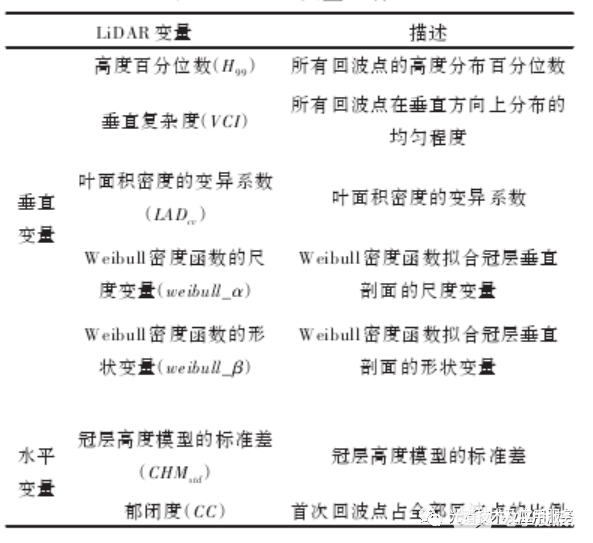
冠層高度模型CHM描述了樹冠的表面形態(tài)。樹木枯梢會增加激光脈沖的穿透率,并在CHM的水平方向產(chǎn)生不同大小的不規(guī)則斑塊,因此可以通過CHM的標準差(CHMstd)反映冠層的稀疏程度以及落葉情況。郁閉度(CC)是反映林分質(zhì)量的重要參數(shù),是冠層垂直投影與林地面積之比。使用LiDAR估測郁閉度時,常用首次回波點與所有回波點的比值表示。提取的變量及其具體描述見表3。
表3LiDAR變量及描述
2.4森林健康指標構(gòu)建
本研究采用Person’s相關(guān)系數(shù)度量LiDAR變量之間的關(guān)系,從而確定能夠全面且系統(tǒng)地反映森林健康狀況的關(guān)鍵LiDAR變量。先通過層次聚類的類平均法對LiDAR變量進行聚類,把相關(guān)性相似的變量歸為一類;再根據(jù)類別內(nèi)相關(guān)系數(shù)最大(能代表所在類的所有指標)、類別間相關(guān)系數(shù)最小(與其他類的指標相關(guān)性最低)的原則,在每一類中只選取一個變量作為關(guān)鍵變量構(gòu)成森林健康指標。為了探究森林健康指標在解釋森林健康狀況時的機理,采用無監(jiān)督的層次聚類法將每個指標分為3類,分別對應(yīng)刺槐健康等級中的健康、亞健康、不健康。最后根據(jù)每個指標的聚類結(jié)果,以類邊界處的中值作為閾值,構(gòu)建森林健康指標的分級閾值。與美國林業(yè)局樹冠狀況分類指南類似,本研究基于森林健康指標制定了森林健康等級的判斷規(guī)則,即識別1個樣方是否滿足健康或不健康的規(guī)則,若不符合這2個等級則被視為亞健康。據(jù)此對研究區(qū)的刺槐林進行森林健康等級判斷,采用總精度和Kappa系數(shù)對判斷結(jié)果進行評價。
3結(jié)果與分析
3.1LiDAR變量分析
根據(jù)LiDAR變量的Person’s相關(guān)系數(shù)(圖2)將其分為4類。LADcv和weibull_α分別單獨作為一類(與其他變量相關(guān)性低),CHMstd和H99為一類(r=0.84),weibull_β、CC、VCI為一類,相關(guān)系數(shù)為0.64~0.94。隨后根據(jù)選取原則,分別在后2個類別中選取H99和VCI。最終得到由LADcv、weibull_α、H99和VCI4個變量組成的森林健康指標。
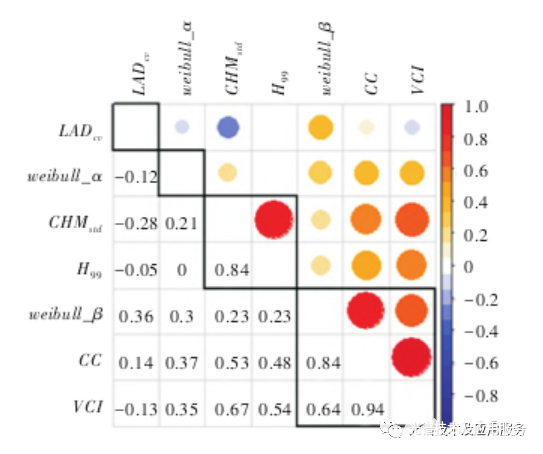
圖2LiDAR變量的相關(guān)矩陣圖
3.3刺槐人工林的健康判斷與評價
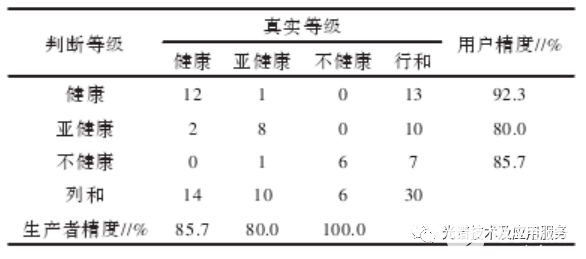
基于上述森林健康指標對研究區(qū)的30個樣方進行健康等級判斷,通過與野外調(diào)查結(jié)果比較,可知分類的總精度為86.7%,Kappa系數(shù)為0.79,對判斷結(jié)果的評價如表6所示。由表6可知,健康等級之間的混淆主要出現(xiàn)在健康樣方和亞健康樣方之間,健康樣方的生產(chǎn)者精度為85.7%,說明14.3%的健康樣方被錯分為亞健康樣方,用戶精度為92.3%,說明7.7%的亞健康樣方被錯分為健康樣方;亞健康樣方的生產(chǎn)者精度為80.0%,有20.0%的亞健康樣方被錯分為健康或不健康樣方;用戶精度為80.0%,說明有20.0%的健康樣方被錯分為亞健康樣方;重度枯梢刺槐樣方的生產(chǎn)者精度為100.0%,而用戶精度為85.7%,說明不健康樣方均被正確識別,但是有14.3%的亞健康樣方被錯分為不健康。因此森林健康指標識別健康和不健康樣方有較大優(yōu)勢,但對亞健康樣方的識別精度有待提高。
表6基于森林健康指標的刺槐森林健康等級精度評價
4討論與結(jié)論
4.1討論
黃河三角洲刺槐林的生長主要受長期土壤鹽漬化的脅迫,整體生長狀況不佳,不同退化程度導(dǎo)致刺槐林的樹高、郁閉度情況存在差異。本研究利用LiDAR數(shù)據(jù)從樹冠結(jié)構(gòu)角度對其健康狀況進行判別,獲得了較理想的效果,主要是由于發(fā)生退化的刺槐多表現(xiàn)為落葉或樹木低矮,很少表現(xiàn)為樹冠枯黃變色。但是對于那些樹葉變黃但還沒有掉落的樹木,僅從結(jié)構(gòu)角度判斷仍存在缺陷,此時利用光譜信息可以檢測到這種變化。葉片變黃是因為葉綠素含量減少,會在525~565nm(綠色)、690~730nm(紅邊)和730~760nm(近紅外)區(qū)域發(fā)生顯著變化。森林健康是植被結(jié)構(gòu)和葉片化學(xué)特征的函數(shù),植被結(jié)構(gòu)指樹冠的變化,而葉片化學(xué)特征是指各種色素的含量。因此,在今后的研究中可以把能描述樹冠三維結(jié)構(gòu)的LiDAR技術(shù)與能反映樹葉生化特征的高光學(xué)遙感技術(shù)結(jié)合起來,將有助于提高對森林健康等級的識別精度。
4.2結(jié)論
本研究以黃河三角洲孤島林場的刺槐林為研究對象,利用無人機LiDAR數(shù)據(jù)提取表征植被垂直和水平變化的LiDAR特征變量,并通過聚類分析構(gòu)建森林健康指標,得到以下結(jié)論:①森林健康指標包括LADcv、weibull_α、H99和VCI,分別從樹葉茂密程度、樹冠形狀、樹高、植被垂直分布4個方面對森林健康狀況進行評價;②森林健康指標能有效識別出健康和不健康的刺槐林,對亞健康刺槐林的識別精度有待提高,總體上的分類精度較理想(總精度為86.7%,Kappa系數(shù)為0.79),說明激光雷達技術(shù)可以在判斷森林健康狀況方面發(fā)揮重要作用。今后的研究中可與高光譜信息結(jié)合起來,構(gòu)建更為完善的森林健康指標。
萊森光學(xué)(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應(yīng)用系統(tǒng)的研發(fā)、生產(chǎn)和銷售。
審核編輯:符乾江
-
無人機
+關(guān)注
關(guān)注
231文章
10841瀏覽量
186751 -
激光雷達
+關(guān)注
關(guān)注
971文章
4234瀏覽量
192836
發(fā)布評論請先 登錄
10000Hz!超高頻激光雷達助力無人機避障
鐳神智能MS10超遠距光纖激光雷達:低空安全的"千里眼",打造無人機管控新標桿

鐳神智能 MS09 超遠距低空管控反無人機探測激光雷達:為低空經(jīng)濟筑牢安全防線
3000W激光反制無人機系統(tǒng) - 全天候守護重點區(qū)域安全防線
無人機智能巡檢系統(tǒng)守護森林防火安全
鐳神智能無人機探測激光雷達產(chǎn)品矩陣:構(gòu)筑低空安防的智慧天眼
ZY2000低空安防激光系統(tǒng):全天候無人機反制解決方案
海外首款由激光雷達驅(qū)動的無人機發(fā)布
激光雷達技術(shù)或可助力防御無人機
激光雷達技術(shù)的基于深度學(xué)習(xí)的進步
激光雷達在無人機中的應(yīng)用實例
激光雷達技術(shù)的發(fā)展趨勢
鐳神智能激光雷達低空無人機目標追蹤光電系統(tǒng):筑牢機場低空安防屏障





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論