") 基于事件的視覺傳感,變革機(jī)器視覺技術(shù)
基于事件的視覺傳感,變革機(jī)器視覺技術(shù)

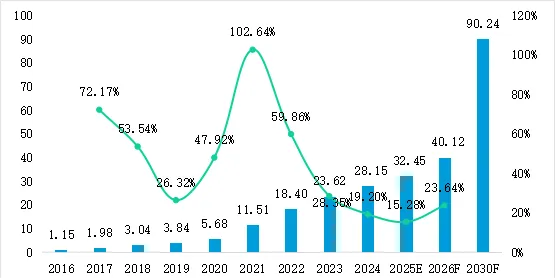
目前,我們正處于機(jī)器視覺和人工智能轉(zhuǎn)型的初期,據(jù)Yole Development等市場(chǎng)研究機(jī)構(gòu)的分析,預(yù)計(jì)到2030年,視覺技術(shù)將創(chuàng)造價(jià)值100億美元的市場(chǎng)。該技術(shù)會(huì)滲透到包括自動(dòng)駕駛、AR、可穿戴計(jì)算成像、機(jī)器人技術(shù)等各個(gè)領(lǐng)域。
機(jī)器視覺和人工智能領(lǐng)域總是離不開視覺技術(shù)的,基于事件的神經(jīng)擬態(tài)視覺是一種新的成像技術(shù)范式,可以極大提高機(jī)器感知周圍環(huán)境的能力,從而做出智能決策。這種更進(jìn)一步的視覺技術(shù)如何在機(jī)器視覺和人工智能領(lǐng)域創(chuàng)造新的技術(shù)標(biāo)準(zhǔn),如何將現(xiàn)有應(yīng)用的性能提升到全新的水平?
基于事件的視覺技術(shù)與傳統(tǒng)圖像傳感器的本質(zhì)區(qū)別
基于事件的神經(jīng)擬態(tài)視覺技術(shù)受生物原理啟發(fā),與傳統(tǒng)的圖像傳感器工作方式有很大的不同。類似于人眼視網(wǎng)膜,基于事件的神經(jīng)擬態(tài)視覺技術(shù)傳感器不會(huì)在固定的時(shí)間生成圖像,而是著重于關(guān)注場(chǎng)景的動(dòng)態(tài)變化。這種動(dòng)態(tài)變化信息對(duì)于機(jī)器視覺和人工智能是相當(dāng)重要的。這種工作原理意味著基于該技術(shù)的傳感器采集圖像的方式是異步的、連續(xù)的,在模擬域中運(yùn)作。每個(gè)感光器都是獨(dú)立的,只對(duì)變化的事物作出反應(yīng),靜態(tài)的背景信息不會(huì)被一遍又一遍被重復(fù)采集。
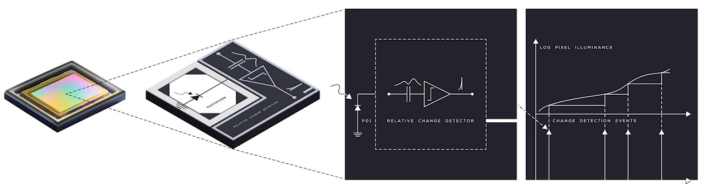
(像素的智能感知,Prophesee)
為了模擬這種生物學(xué)原理,需要設(shè)計(jì)智能像素,通過像素內(nèi)嵌的智能設(shè)計(jì)來實(shí)現(xiàn)。上圖所示的這套模擬處理系統(tǒng),基于電平交叉采樣電路,每個(gè)像素都能夠?qū)?chǎng)景中的亮度變化做出反應(yīng),從而壓縮冗余,提高數(shù)據(jù)傳輸速率。
以上圖中的傳感器為例,其時(shí)間可以精確至微秒級(jí),而且數(shù)據(jù)采集速度非常快,更重要的是每個(gè)像素都能獨(dú)立異步工作。因此基于該技術(shù)的傳感器的數(shù)據(jù)采集功能并不受場(chǎng)景中照明條件的影響。如此一來,這代表著其動(dòng)態(tài)范圍是比傳統(tǒng)的圖像傳感器要高的,大概在120-130dB之間。
基于事件的異步自適應(yīng)采樣和基于幀的數(shù)據(jù)采樣,差異也很明顯。在固定時(shí)間獲得的一系列圖像不可避免地會(huì)導(dǎo)致信息的冗余,雖然其產(chǎn)生的信息在時(shí)間上是連續(xù)的,但由于數(shù)據(jù)采集本身的非連續(xù)性,幀與幀之間會(huì)缺失信息。基于事件的異步自適應(yīng)采樣只獲取正在變化的信息,換個(gè)說法就是捕捉時(shí)空范圍內(nèi)連續(xù)的信息流(像素級(jí)別)。根據(jù)Prophesee的說法,這種傳感器不會(huì)產(chǎn)生原始數(shù)據(jù),而是僅提供處理任務(wù)所需的必要信息。
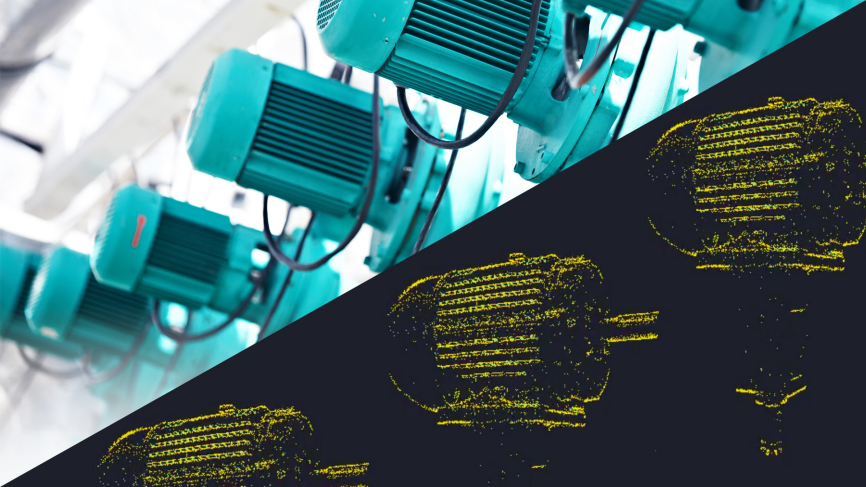
(采集對(duì)比,Prophesee)
圖像之間隱藏信息
基于事件的傳感器可以快速響應(yīng)場(chǎng)景變化,揭示迄今為止基于幀的傳感器難以記錄的信息。基于幀的捕捉采集動(dòng)態(tài)范圍不可避免是有限的,而且對(duì)光照條件極度依賴,對(duì)于新興的人工智能以及機(jī)器視覺并不友好。在對(duì)于運(yùn)動(dòng)物體的理解上,幀與幀之間是沒有信息記錄的,這對(duì)于理解整個(gè)運(yùn)動(dòng)來說是很困難的,甚至有時(shí)候是不可能的。而基于事件的傳感帶來的連續(xù)的信息流,讓處理系統(tǒng)的跟蹤變得更為容易,對(duì)動(dòng)態(tài)信息的理解更深刻。這也意味著可以在本地更新跟蹤,在時(shí)間準(zhǔn)確度上提升一個(gè)大層次。
基于事件的傳感器能記錄亞毫秒時(shí)間級(jí)別的時(shí)間,等效于10000fps,能夠捕捉到那些轉(zhuǎn)瞬即逝的事件;因?yàn)椴挥涗浫哂鄶?shù)據(jù),系統(tǒng)需要處理的數(shù)據(jù)減少了10至1000倍,對(duì)于關(guān)鍵動(dòng)態(tài)信息的獲取更準(zhǔn)確;同時(shí)其高動(dòng)態(tài)范圍,能夠抓取極端照明條件下隱藏起來的信息。
從機(jī)器學(xué)習(xí)的角度來看,這種連續(xù)的信息流抓取、跟蹤,對(duì)于其數(shù)學(xué)模型的構(gòu)建也是一個(gè)相當(dāng)大的簡(jiǎn)化。
基于事件的傳感器演進(jìn)
目前,基于事件的視覺技術(shù)傳感器已經(jīng)發(fā)展到了第四代。采用背照式(BSI)3D堆棧工藝制造,硅面積相比第三代VGA傳感器減少了10倍以上。因?yàn)閷IS層堆疊在了CMOS層之上,所以器件感光區(qū)域和邏輯電路較之前代也有一定的優(yōu)化。像素間距也降低至了4.86微米,加上超過80%的填充因子,傳感器具備更高的光電性能。
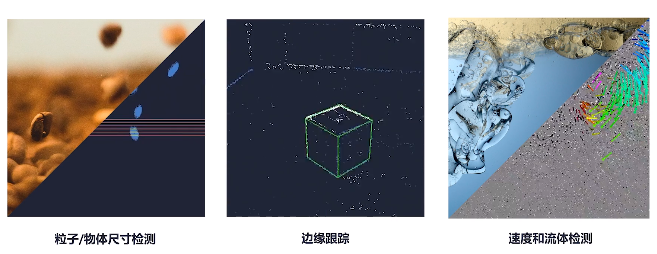
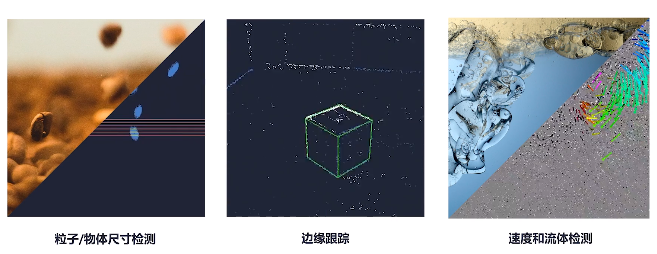
(應(yīng)用場(chǎng)景,Prophesee)
基于該傳感器的機(jī)器學(xué)習(xí),可以不使用圖像來訓(xùn)練神經(jīng)網(wǎng)絡(luò)識(shí)別物體,二是使用時(shí)間編碼的信息。這給機(jī)器學(xué)習(xí)帶來了不小的改變,一是無需等待幀圖像大大降低了延遲,二是更容易泛化,抓取最主要的事件特征,減少數(shù)據(jù)集,最后則是減少了計(jì)算量。
小結(jié)
總的來看,基于事件的視覺傳感技術(shù)不受幀速率限制,實(shí)現(xiàn)了更快的速度和更高動(dòng)態(tài)范圍,其生成的數(shù)據(jù)量比傳統(tǒng)圖像傳感器少且功率更低(<10 mW),為機(jī)器視覺和人工智能提供了更具成本效益的視覺解決方案。
-
機(jī)器視覺
+關(guān)注
關(guān)注
163文章
4595瀏覽量
122885 -
視覺傳感器
+關(guān)注
關(guān)注
3文章
268瀏覽量
23331
發(fā)布評(píng)論請(qǐng)先 登錄
3D視覺引領(lǐng)工業(yè)變革
EtherCAT科普系列(8):EtherCAT技術(shù)在機(jī)器視覺領(lǐng)域的應(yīng)用

【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
機(jī)器視覺照明的技術(shù)選擇與應(yīng)用
友思特邀您相約2025上海機(jī)器視覺展
2025上海機(jī)器視覺展同期活動(dòng)精彩紛呈,速來免費(fèi)報(bào)名!

從2D走向3D的視覺傳感器
機(jī)器視覺技術(shù):照亮工業(yè)4.0未來征途,報(bào)名火熱進(jìn)行中

適用于機(jī)器視覺應(yīng)用的智能機(jī)器視覺控制平臺(tái)

機(jī)器視覺要面臨的挑戰(zhàn)及其解決方法
視覺檢測(cè)是什么意思?機(jī)器視覺檢測(cè)的適用行業(yè)及場(chǎng)景有哪些?
焊接機(jī)器人視覺控制技術(shù)有哪些組成
機(jī)器視覺在焊接質(zhì)量檢測(cè)中的應(yīng)用
微視傳感高性能3D視覺產(chǎn)品亮相2024上海機(jī)器視覺展
Prophesee:基于EVS打造機(jī)器視覺新范式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論