 EtherCAT科普系列(8):EtherCAT技術在機器視覺領域的應用
EtherCAT科普系列(8):EtherCAT技術在機器視覺領域的應用
機器視覺是基于軟件與硬件的組合,通過光學裝置和非接觸式的傳感器自動地接受一個真實物體的圖像,并利用軟件算法處理圖像以獲得所需信息或用于控制機器人運動的裝置。機器視覺可以賦予機器人及自動化設備獲取外界信息并認知處理的能力。機器視覺系統內包含光學成像系統,可以作為自動化設備的視覺器官實現信息的輸入,并借助視覺控制器代替人腦實現信息的處理與輸出。從而實現賦予自動化設備看與處理的能力,替代人眼完成生產制造中的識別、測量、定位以及檢測等工作。
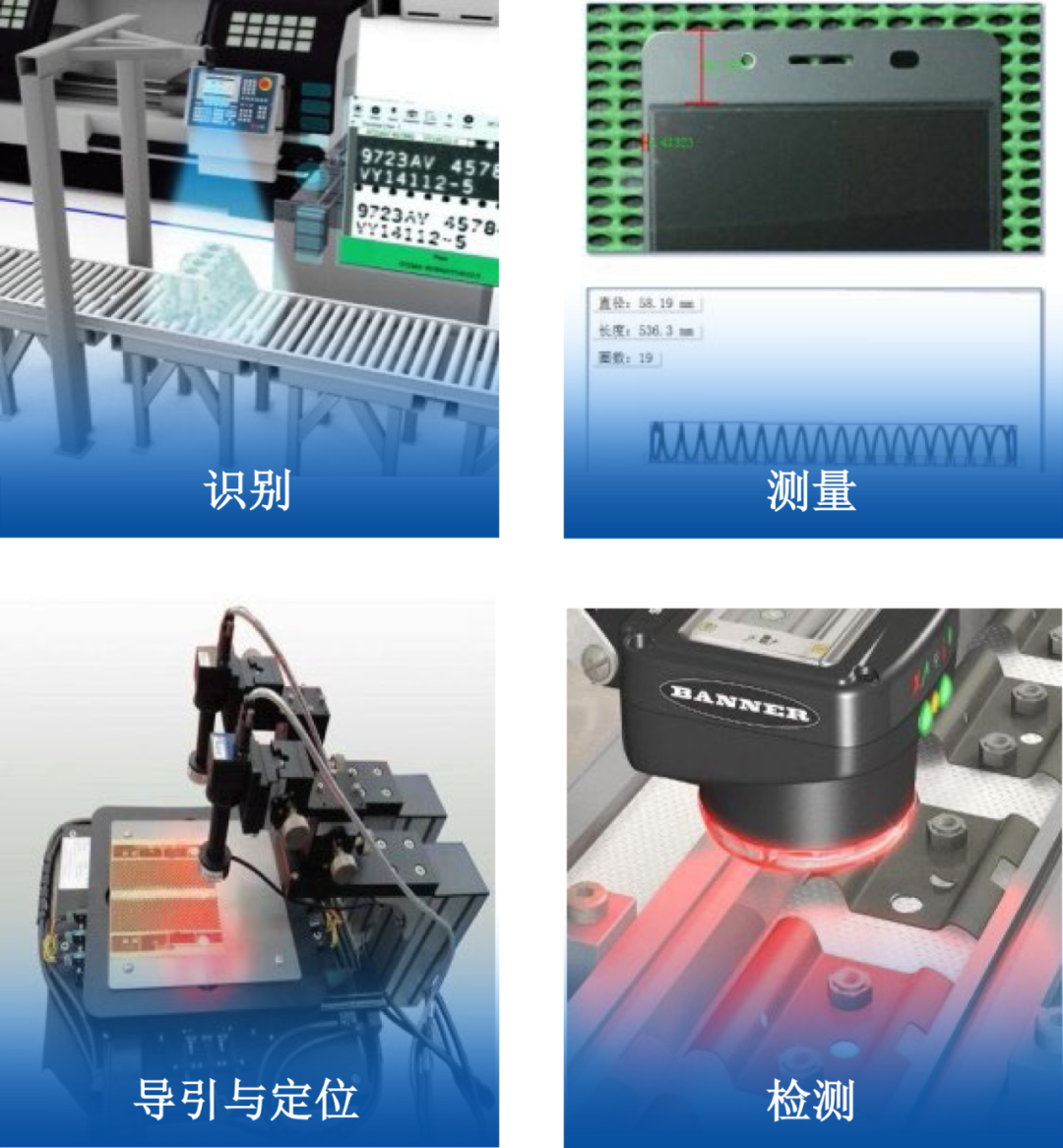
▲機器視覺的四大基礎功能機器視覺作為工業傳感的核心,是機器人和自動化設備的眼睛,是建設數字化工廠感知網絡的關鍵節點,同時也是實現柔性化智能生產的重要組成部分。一個典型的機器視覺系統,一般包括:工業光源、工業鏡頭、工業相機、視覺控制系統(視覺軟件及視覺控制硬件)等。其中,工業光源負責照亮目標并突出可視化特征,工業鏡頭負責將光源照亮的物體成像折射投影至工業相機感光元件,工業相機負責將感光元件接收到的圖像采集并輸送至控制系統,以上三個硬件部分負責成像功能。視覺控制系統則負責對成像結果進行處理分析、輸出分析結果或控制指令至其他執行機構。
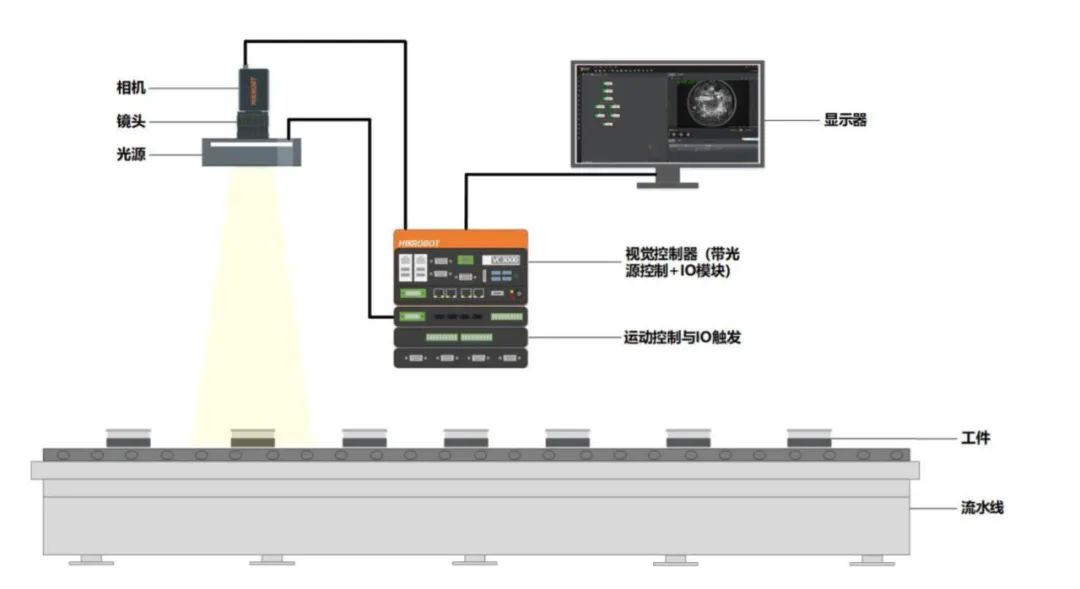
▲機器視覺系統構成圖(來源:海康機器人)
隨著工業自動化技術不斷走向成熟,對于物體檢測、增強分析、監控容差和準確的組件測量等能力要求也逐漸提升,越來越多的制造企業開始采用機器視覺系統來實現生產過程中檢查、測量和自動識別等功能的優化。從全球市場來看,GGII數據顯示,2023年全球機器視覺市場規模 925.21億元,2024年全球機器視覺市場規模有望突破1000億元,同比增速 8.63%左右,預計至2028年全球市場規模有望接近1400 億元,2024-2028年年均復合增長率約為8.20%。2023年中國機器視覺市場規模185.12億元,2024年中國機器視覺市場規模有望突破200億元,同比增速接近12%,預計至2028年我國機器視覺市場規模將超過395億元,2024-2028年復合增長率約為17.5%。
01
機器視覺技術集成方式
在工業控制系統中集成機器視覺技術已經成為了一種趨勢。目前,現有的視覺與控制系統的集成方法主要分為兩類,即軟件集成和通信集成。
軟件集成
軟件集成即是由攝像機采集圖像,然后將圖像信息通過成熟的通信方式如 PCI)、USB、串口、火線或TCP/IP協議直接傳給PC,由PC中的專用軟件進行圖像處理,最終通過輸出實現控制功能。該集成方法需通過非實時性接口傳輸大量的圖像信息給PC,很容易成為整個系統性能提升的“瓶頸”所在。同時PC的操作系統如Windows,通常并不具有實時性,難以直接應用于對實時性有嚴格標準的工業控制當中,并且由于非實時性,系統進行圖像處理時間無法確定,因此時間的波動性也較大。
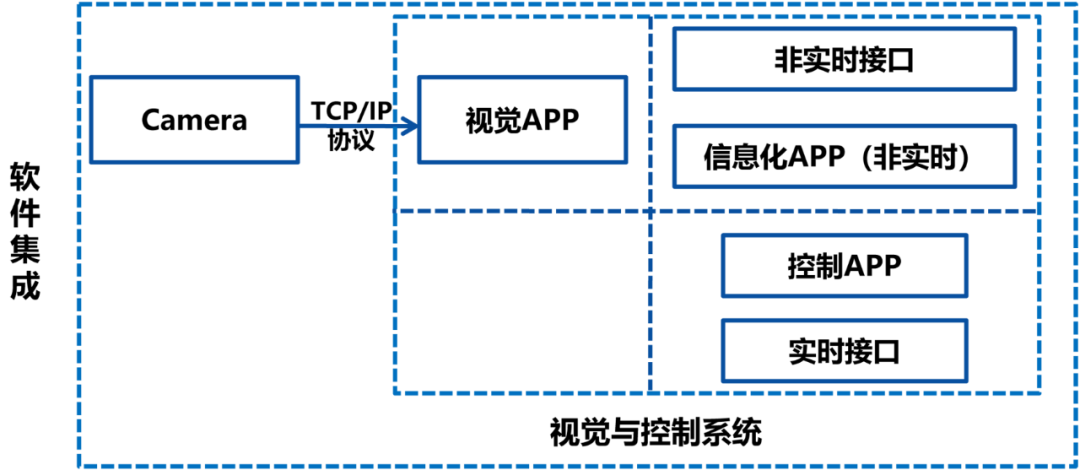
▲機器視覺技術軟件集成方式
通信集成
通信集成即是通過嵌入式設備直接進行圖像的采集和處理,然后將處理的信息通過 USB、串口或 TCP/IP 協議輸出給控制系統實現控制功能。智能相機是這種視覺集成方式的典型代表。該方法使得整個系統變得小巧,且具有一定的圖像處理實時性,但是對于控制系統的實時性卻無法保證,并且如果需要實現特定功能,其整個開發周期又十分漫長,難以滿足實際需求。
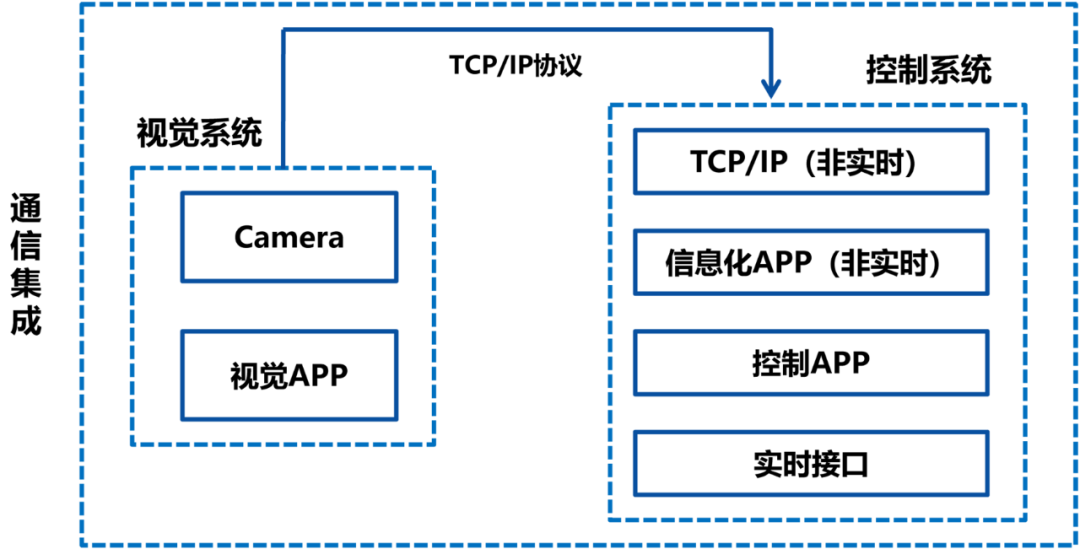
▲機器視覺技術通信集成方式
在自動化程度較高的工業控制中,有大量集成機器視覺的應用需求,例如智能裝配、快速分揀等。這些應用都對機器視覺的集成方法、穩定性、快速響應和實時性有著較高的要求;同時,現有的視覺集成方法如通信集成和軟件集成具有實時性不足的缺點,復雜的傳輸環境使得視覺系統和控制系統間的關系變得難以預測,這對需要實時控制的應用來說影響很大;同時傳統的視覺算法大多依賴于PC,應用成本高且難以向設備小型化發展。德國倍福公司提出了一種解決實時性不足的EtherCAT技術,該技術以傳統的以太網為基礎,并充分利用了其全雙工的通信方式,使數據的傳輸具有可預測和同步精度高的特點。同時,該技術在數據鏈路層使用實時調度的軟核,并利用雙端口RAM進行 PDO(過程數據對象)的傳輸,從而有效的提高了實時性。
02
基于EtherCAT的機器視覺集成系統
基于EtherCAT視覺系統集成技術,使用EtherCAT將機器視覺系統與運動控制系統集成,視覺系統與運動控制系統間關系得到了確定,從而使該視覺集成方法擁有良好的實時性和確定性,同時使用SPI集成了具有圖像處理功能的視覺模塊,不僅減少了傳輸的數據量,還對PC的依賴小,可滿足如今設備小型化發展的需求;腳本化的編程方式也降低了開發難度,提高了效率。
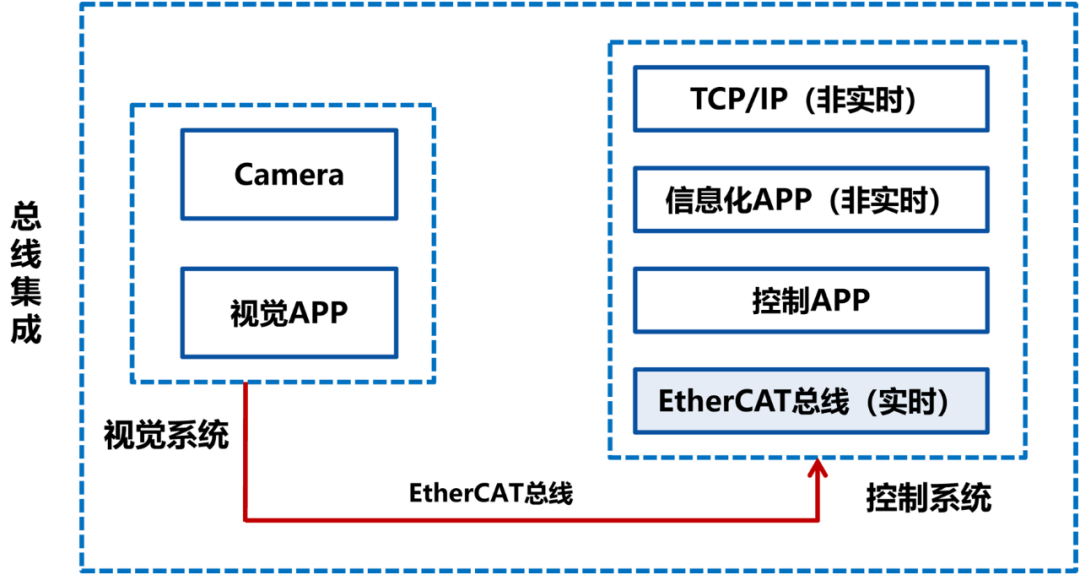
▲基于EtherCAT機器視覺系統集成技術示意圖基于EtherCAT的機器視覺集成系統由視覺檢測和運動控制兩部分組成。
視覺檢測部分的圖像數據采集由工業相機完成。圖像處理任務由控制器完成。運動控制部分主要是EtherCAT主站和從站的搭建,控制命令由主站發出經從站傳遞給驅動器,完成對工作臺的運動控制。控制系統采用普通PC+EtherCAT從站的形式。圖像處理單元和EtherCAT主站通過EtherCAT總線完成數據共享。視覺系統EtherCAT從站由從站控制器芯片和微處理器共同搭建包括通信板和視覺檢測兩部分。通信板經網口實現與系統主站的EtherCAT通信功能,接收系統主站發送的EtherCAT下行數據幀并進行解析,獲取主站發送的控制信息并將控制信息通過SPI接口轉發給視覺檢測微處理器,同時將視覺檢測采集的數據信息經SPI接口插人到EtherCAT數據幀中返回給主站。運動控制從站由驅動模塊(步進電機驅動或者伺服電機驅動等)和執行器(機械臂等)組成。視覺檢測將圖像處理后提取的源圖像寬高等信息通過EtherCAT通信板傳給主站,同時驅動模塊從站將執行器執行結果信息反饋傳給主站。主站收到后進行轉換輸出,執行對工件的實時控制指向。
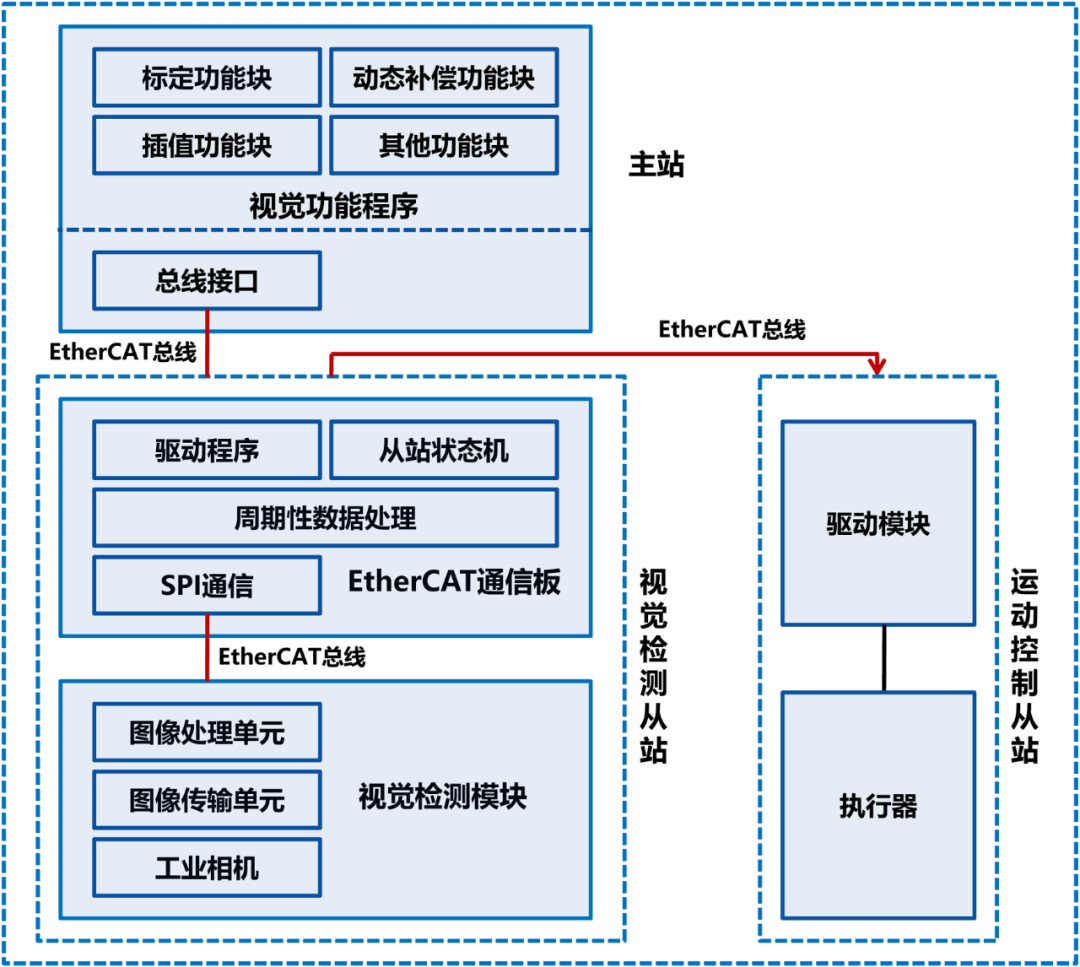
▲基于EtherCAT的機器視覺系統框架
03
碼靈半導體EtherCAT機器視覺系統解決方案
EterCAT從站的核心部分是EterCAT從站控制器芯片(ESC),ESC使用雙端口 RAM 實現EtherCAT 主站和從站之間的數據交換。碼靈半導體推出的CF110x系列為EtherCAT機器視覺系統從站控制器芯片提供了全新的選擇。
▲碼靈半導體CF110x系列芯片實物圖
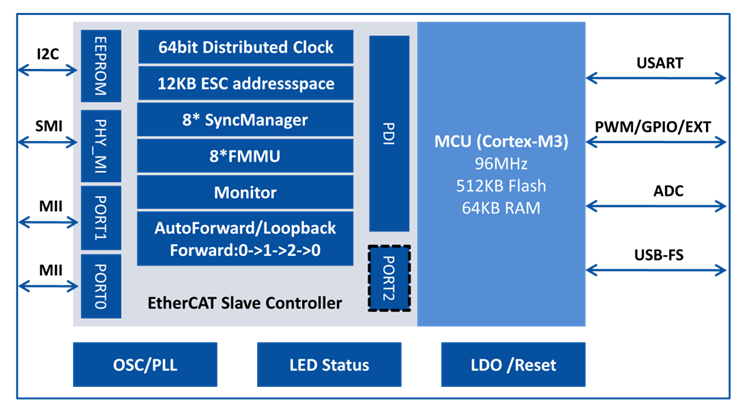
碼靈半導體CF110x系列芯片內部集成了兩個以太網PHY,不再需要額外PHY,大大的簡化了外圍電路設計。同時該芯片每一個PHY包含了一個全雙工100BASE-TX收發器,支持雙工100Mbps的工作頻率,在借助光纖收發裝置情況下還支持100Mbps光纖通信,支持Auto-Negotiation自動協商、Auto-MDIX自動交叉識別功能,所以在設計時可以采用交叉LAN 光纜或者直接連接。CF110x系列從站控制器具有8KB的DPRAM和8個FMMU,還包括8個SyncManager,同時該ESC可以通過8/16位總線與8/16/32位嵌入式微處理器相連。CF110x系列工作時可提供緩沖和郵箱兩種工作模式。緩沖模式下,EtherCAT主器件和本地微處理器可同時對器件執行寫入操作,但由于該ESC的緩沖區始終只包含最新數據,如果新數據在舊數據讀出前到達,舊數據將被覆蓋。這也就意味著我們需要在數據在覆蓋之前執行讀取操作。郵箱模式下,EtherCAT 主器件和本地微處理器采樣握手的方式來訪問緩沖區,從而確保不會丟失任何數據。主設備與本地應用還可以使用SPI通信協議進行數據交換。CF110x系列的每一個端口包含一個標準運行指示器和一個鏈路/活動指示器,在工作時可以通過指示器判斷 CF110x系列的工作狀態,同時CF110x系列內部集成了64位分布式時鐘,在同步模型下,可以提供準確的時鐘同步功能。
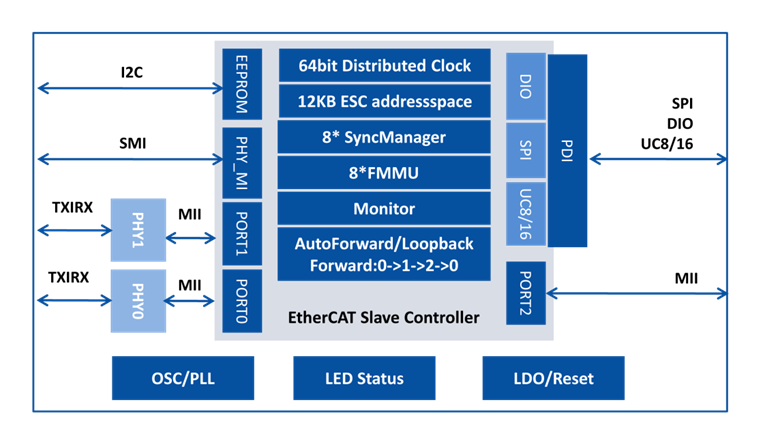
▲碼靈半導體CF1106系列產品結構框圖
碼靈半導體CF110x系列支持3種工作模式:數字IO模式、單片機模式以及擴展模式。數字IO模型是最簡單的一種工作模式,該模型下從站設備不需要外接嵌入式微處理器,可通過 EtherCAT 主器件來監控和控制32個數字IO,還可另外提供了6個控制信號,該模式一般適用于一些簡單的IO控制場合。在單片機模型下,CF110x系列可通過類似于SRAM 的從接口與嵌入式微處理器通信。憑借簡單但功能強大的主機總線接口,該器件可通過8/16位外部總線無縫連接到大多數通用8/16/32位微處理器和單片機。同時在單片機模式下該器件也可以通過SPI總線進行訪問,該方式也可同時提供多達32個通用IO。擴展模式是指當器件處于SPI模式時,可通過第三個網絡端口用來提供額外的MII端口。內置的PHY可通過該端口與ESC連接,以實現樹形或星型網絡拓撲,同時該端口可配置為上行方向或下行方向。
▲碼靈半導體CF1103系列產品結構框圖
使用面向實時總線EtherCAT應用的機器視覺系統不僅開發方便、數據傳輸速度快、實時性高,視覺系統與控制系統間的關系具有確定性,還符合工業控制領域的發展趨勢。碼靈半導體CF110x系列可為機器視覺系統的EtherCAT通信板、運動控制驅動模塊等場景提供實時性、可靠性、低成本的EtherCAT通信技術。
-
傳感器
+關注
關注
2562文章
52524瀏覽量
763555 -
嵌入式
+關注
關注
5141文章
19524瀏覽量
314781 -
機器視覺
+關注
關注
163文章
4508瀏覽量
122220 -
ethercat
+關注
關注
19文章
992瀏覽量
39610
發布評論請先 登錄





 工商網監
工商網監
評論