") CAN和CAN FD對汽車領(lǐng)域不同應(yīng)用的實現(xiàn)
CAN和CAN FD對汽車領(lǐng)域不同應(yīng)用的實現(xiàn)
由于汽車領(lǐng)域?qū)挼母咭螅?a target="_blank">CAN(控制器局域網(wǎng))規(guī)范被擴展為靈活的數(shù)據(jù)速率,新的迭代稱為 CAN FD。
CAN 具有成本、靈活性和魯棒性等優(yōu)勢,所有這些優(yōu)勢都對許多領(lǐng)域的非汽車應(yīng)用非常有利。CAN FD 擴展的市場機會更加廣闊。本文介紹了 CAN 和 CAN FD 的基礎(chǔ)知識,以及使用不同物理層或更高層協(xié)議的不同應(yīng)用實現(xiàn),CAN 作為數(shù)據(jù)鏈路層。
首先,讓我們談?wù)?CAN 相對于 RS232 或 RS485 等標(biāo)準(zhǔn)串行通信的優(yōu)勢。由于 CAN 具有更高的通信速度和錯誤檢測功能,因此它具有出色的魯棒性和更低的成本。
成本和靈活性
汽車行業(yè)最重要的驅(qū)動力是減少汽車中的布線數(shù)量。由于采用雙絞線布線,布線相對容易,而且重量較輕,價格也不貴。終端電阻器對于高速運行 CAN 和 CAN FD 是必需的。靈活性是一個很大的優(yōu)勢,因為使用更多節(jié)點擴展系統(tǒng)非常容易。

錯誤檢測和魯棒性
CAN 和 CAN FD 包含非常可靠的錯誤檢查機制。比特填充和監(jiān)控在第一層工作,而幀檢查、確認(rèn)和循環(huán)冗余校驗在 OSI 模型的第二層工作。
位填充在五個連續(xù)的高位或低位之后添加一個交替位。具有相同級別的六個連續(xù)位表示錯誤。位監(jiān)控會讀回發(fā)送的每條消息。如果存在差異(仲裁或確認(rèn)字段除外),則檢測到錯誤。一個很大的優(yōu)勢是可以非常及時地檢測到錯誤。
由于數(shù)據(jù)長度不同,CAN 和 CAN FD 上的循環(huán)冗余檢查實現(xiàn)方式不同。幀錯誤(有時也稱為格式或格式錯誤)使用在接收方必須相同的預(yù)定義值。每條消息都需要被確認(rèn)。這三個錯誤檢查機制在消息級別上運行良好。
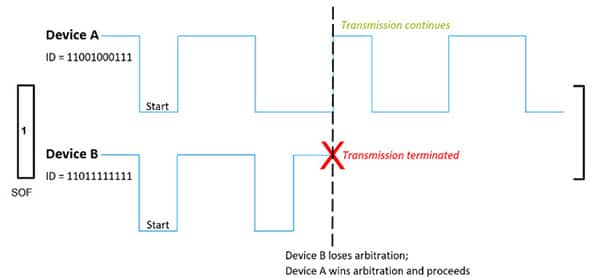
總之,CAN 和 CAN FD 通過多種不同的錯誤檢查非常穩(wěn)健可靠。在消息傳輸過程中不會丟失任何數(shù)據(jù),并且可以防止消息沖突。每個節(jié)點在發(fā)送之前等待一段時間的不活動。情況二,同時發(fā)送消息,發(fā)送方檢測哪個消息的優(yōu)先級較高,并禁用較低優(yōu)先級的消息。與兩種消息都停止并稍后發(fā)送的以太網(wǎng)相比,在 CAN 上具有最高優(yōu)先級的消息通過。
高速和低延遲
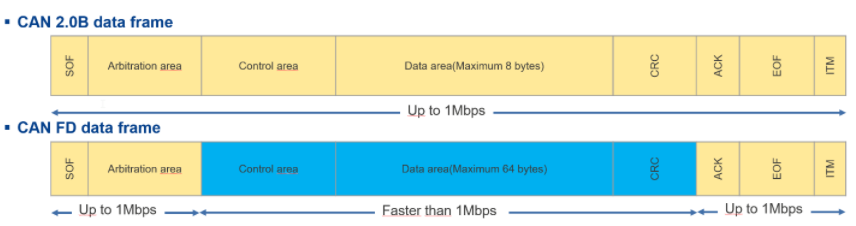
CAN 支持高達(dá) 1Mbps 的數(shù)據(jù)速率。借助 CAN FD,可以根據(jù) CAN FD 控制器的最大時鐘來提高控制和數(shù)據(jù)區(qū)域的數(shù)據(jù)速率。仲裁階段的速率保持在最大 1Mbps。
CAN 的延遲小于 145us,而具有 8Msps 和 8Byte 數(shù)據(jù)的 CAN FD 小于 58us。
短數(shù)據(jù)幀在延遲方面具有優(yōu)勢。整個包的傳輸和解碼速度更快,因此反應(yīng)時間也更快。隨著 CAN FD 上更高的傳輸速率,這種影響甚至更大。與為大數(shù)據(jù)量設(shè)計的 TCP/IP 通信相比,包較大,因此延遲增加。這意味著 CAN FD(取決于數(shù)據(jù)量)與 10 或 100Mbit 的 TCP/IP 通信相比可能具有更短的反應(yīng)時間,并顯示出更好的總實時性能。

限制
關(guān)于節(jié)點的數(shù)量,理論上沒有限制,因為每條消息都可以發(fā)送到不同的節(jié)點。在實踐中,每個節(jié)點都會在總線上引起信號反射,傳輸質(zhì)量取決于 CAN 收發(fā)器和物理層的實現(xiàn)。
這也是長距離限制速度的原因。通常值在 CAN 上最多為 25 個節(jié)點,在 CAN FD 上最多為 8 個節(jié)點。
汽車以外的應(yīng)用示例
為什么在汽車應(yīng)用之外使用 CAN FD?由于上述的巨大優(yōu)勢。CAN 和 CAN FD 廣泛應(yīng)用于各個行業(yè),包括:
樓宇自動化
- 電梯和升降機
- 門禁控制、燈光控制和安全開門器
- 空調(diào)
汽車售后市場
- 車隊跟蹤、車輛跟蹤
- 記錄預(yù)測性維護(hù)、遠(yuǎn)程信息處理、保險和黑盒
- 醫(yī)療保健設(shè)備
工業(yè)的
- 工業(yè)驅(qū)動
- 內(nèi)閣
消費者
- 游戲機
機器人技術(shù)
- 在主機和鏈?zhǔn)綀?zhí)行器之間
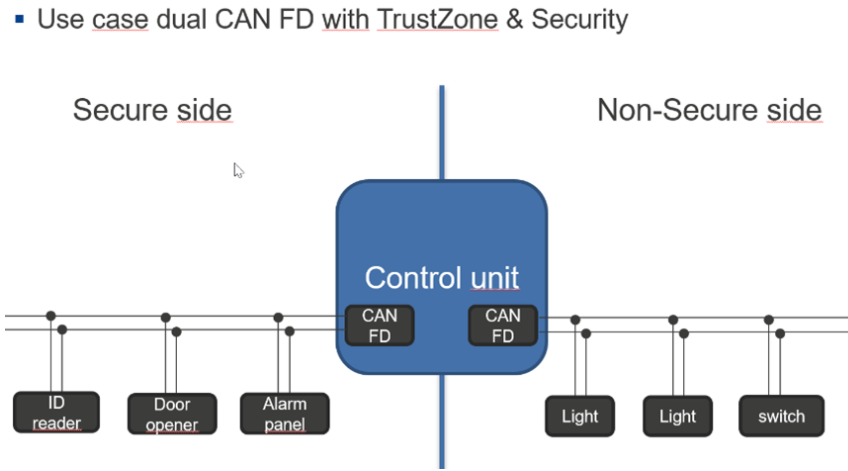
具有兩個 CAN FD 控制器單元以及 TrustZone 和安全性的 MCU 的一個很好的用例是樓宇自動化中的控制單元,將安全部分與非安全部分分開。一個 CAN FD 控制器可用于安全側(cè),以控制關(guān)鍵組件,例如開門器、滑動門和 ID 卡讀卡器。第二個 CAN FD 可用于樓宇自動化中的非關(guān)鍵控制部件,例如燈開關(guān)按鈕、燈泡和建筑物內(nèi)的門。
雙 CAN FD 單元的另一個用例是網(wǎng)關(guān)功能,例如在大型樓宇自動化系統(tǒng)、大型機柜和通信擴展模塊中。具有集成 CAN FD 控制器(如執(zhí)行器、傳感器和控制)的 MCU 有許多不同的用例。
CAN FD 非常適用于需要高安全性和可靠性的應(yīng)用,例如機器人、升降機和運輸系統(tǒng),以及醫(yī)療和保健系統(tǒng)。汽車應(yīng)用所需的可靠性要求在這些用例中也非常有益。
-
mcu
+關(guān)注
關(guān)注
146文章
17831瀏覽量
360317 -
控制器
+關(guān)注
關(guān)注
114文章
16960瀏覽量
182887 -
CAN
+關(guān)注
關(guān)注
57文章
2885瀏覽量
466722
發(fā)布評論請先 登錄

廣成科技CAN轉(zhuǎn)CANFD設(shè)備的應(yīng)用案例
如何從傳統(tǒng)的CAN用法中設(shè)置CAN-FD?
廣成科技CAN FD轉(zhuǎn)以太網(wǎng)模塊的應(yīng)用場景
虹科干貨 三代CAN技術(shù)演進(jìn):從CAN CC到CAN XL的創(chuàng)新路徑(上篇)

【CAN總線知識】深度解析CAN-FD與CAN協(xié)議的差別

CAN FD與傳統(tǒng)CAN的區(qū)別是什么

CAN-FD:CAN總線網(wǎng)絡(luò)第二章
從替代到創(chuàng)新,國產(chǎn)CAN FD芯片持續(xù)突破
CAN FD如何滿足工業(yè)設(shè)備對高效數(shù)據(jù)通信的需求?
CAN/CAN FD/CAN XL三大總線協(xié)議解讀,是逐步替代關(guān)系嗎?
TCAN1051-Q1具有CAN FD和故障保護(hù)功能的汽車類CAN收發(fā)器數(shù)據(jù)表






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論