") KUKA大眾標準--帶基移位的搜索運行(相對子程序)
KUKA大眾標準--帶基移位的搜索運行(相對子程序)
帶基移位的搜索運行(相對子程序)
標志 720 必須在宏 57 中打開
必須選擇夾具 TCP (RobWzg) 的方向,以便要移除的組件在 X+ 中移動。容器的測量方式應使底座的 X+ 與搜索運動的方向相同(搜索運行中的 X+ RobWzg)。
使用基本移位搜索
4:LIN SUCHEN VB=500[mm/s] RobWzg=1 Base=1 Fern=Mxx Vred=5% Nah=Mxy P
1: FB PSPS = EIN
2: TECH1 Baseverschiebung Suchlauf Base 31 vorbesetzen Techaufruf=EIN
3: WARTE BIS E23
4: FB PSPS = E14 & E24 & E44 & E80 & M1 & M3
5: LIN VB=200[mm/s] VE=100% ACC=100% RobWzg=1 Base=31 SPSTrig=0[1/100s] P
1: FB PSPS = E14 & E24 & E44 & E80 & M1 & M3
Mxx 和 Mxy~ 遠近傳感器必須防斷線!!!
F558 :
~ 正確的搜索運行選擇
~ 必須手動設置,由 TECHPAKET 設置
~ 重新設置!!!
只有在搜索完成后機器人手控器上出現(xiàn)“Search new base was set”消息時,才能學習第 5 - 8 點!!!
尋找軌跡找到最后一個工件前面有件會自動校正軌跡向后
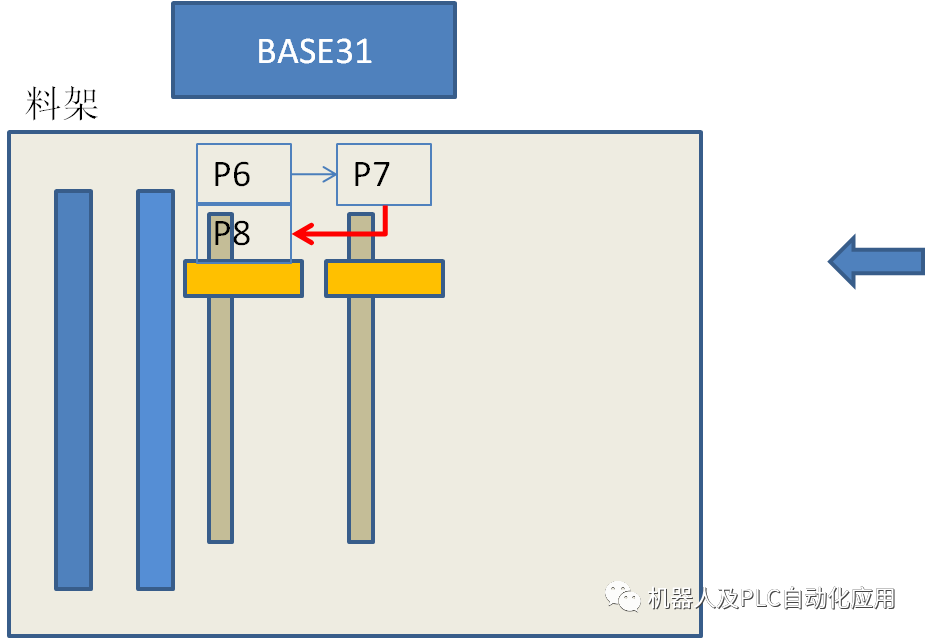
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
P6---接觸工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
P7---返回測量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
P8---抓件
尋找軌跡程序的最遠端
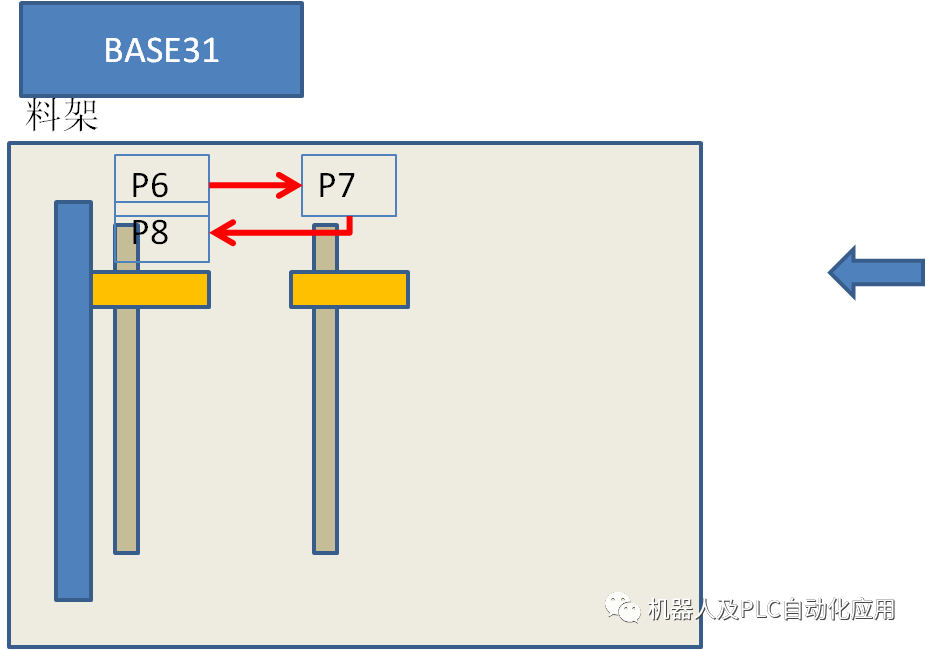
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
P6---接觸工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
P7---返回測量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
P8---抓件
程序分析:
Tech_ BaseverschiebungSuchlauf Base 31 setzen - - -xyz-MaxWeg:- Nah
Name = Baseverschiebung ---基坐標轉(zhuǎn)移
[P1]:
Visible = True
Enum=True
num1=Base 31 vorbesetzen BASE31預填充
num2=Sensor
num11=Suchlauf Base 31 setzen 設置搜索運行 Base 31
num20=VW_XYZ-Scan VW_XYZ 掃描
[P2]:
Visible = True
Enum=True
num1=Dehnfuge1_Korr_X(-) 伸縮縫1
num2=Dehnfuge1_Korr_Y(-)
num3=Dehnfuge1_Korr_Z(-)
num11=Dehnfuge1_Korr_X(+)
num12=Dehnfuge1_Korr_Y(+)
num13=Dehnfuge1_Korr_Z(+)
num21=xyz-Init 初始化
num22=xyz-Referenzfahrt 參考運行
num23=xyz-Messfahrt 測量運行
-------
CASE 11; 搜索成功后設置基數(shù)
CONTINUE
WHILE(VW_MPARA_ACT.BASE_NO<1)
MLD(18,#QuitMsg); 基數(shù)不正確
ENDWHILE
IF $FLAG[Fehler_Suchlauf]==TRUE THEN
MLD(16,#QuitMsg); 搜索運行出錯
ENDIF
;設置基數(shù) 31 BASE_TYPE[..]=#BASE
IF(BASE_TYPE[VW_MPARA_ACT.BASE_NO]==#BASE)THEN
CONTINUE
$BASE=$NULLFRAME
$BASE=$pos_act
BASE_DATA[31]=$BASE
IF NOT $EXT THEN 在手動時會有提示,自動時沒有
MeldNr(4) ;新基地已定
HALT
ENDIF
ENDIF
----------------------END----------------------
審核編輯 :李倩
-
傳感器
+關注
關注
2564文章
52619瀏覽量
763908 -
測量
+關注
關注
10文章
5176瀏覽量
112948 -
KUKA
+關注
關注
3文章
218瀏覽量
16900
原文標題:KUKA 大眾標準--帶基移位的搜索運行(相對子程序)
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
銀基科技參編移動終端與車載設備互聯(lián)系列標準發(fā)布
銀基科技榮獲上汽大眾生態(tài)合作伙伴認證
庫卡KUKA機器人常見故障維修
74HC594-Q100;74HCT594-Q100帶輸出寄存器的8位移位寄存器規(guī)格書

帶低端電源DMOS開關的TPIC6595電源+邏輯8位移位寄存器
linux驅(qū)動程序運行在什么空間
電機帶負載運行故障原因有哪些
移位寄存器中使用的儲存單元是什么
移位寄存器右移是怎么移位的
如何在esp32的程序體中指定一個變量的絕對地址,或者相對于程序首地址的一個固定偏移位置?
Kuka機器人配置Profinet通訊網(wǎng)關HT3S-PNS-ECS






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論