 ADAS和自動駕駛的關鍵組件雷達收發器的介紹
ADAS和自動駕駛的關鍵組件雷達收發器的介紹
在本篇專門介紹汽車雷達的博客中,介紹了使用雷達的原因以及調頻連續波雷達的工作原理。現在,我們將關注系統的性能,從它的最大檢測范圍開始:我們可以檢測到多遠的前方障礙物?我們需要盡可能有遠見,以便能夠檢測到障礙物并采取必要的行動(圖 1)。雷達MMIC收發器的參數有哪些,可以優化到這個范圍?
當然,根據應用程序,對范圍的期望會有所不同。例如,遠程雷達 (LRR) 不需要高分辨率或寬視場,但旨在實現盡可能高的范圍,以增加反應時間并避免高速行駛時發生事故。另一方面,短程雷達 (SRR) 不需要看得很遠,更喜歡具有更高的分辨率和視場。然而,即使在這種配置中,任何可以添加到范圍的額外厘米都可能有助于防止復雜駕駛環境中的事故,例如城市或擁擠的停車場。
1.1 雷達探測距離和雷達距離方程
影響雷達探測范圍的因素很多,設計者無法控制。因此,在第一步中,我們需要使用與電磁波傳播和模擬前端相關的可用基本信息。
雷達范圍R通過其鏈路預算直接與雷達 MMIC 收發器的 RF 性能相關,在這種情況下稱為雷達范圍方程,它提供作為輸出函數的傳遞到 RF 接收器前端的功率Pr發射器前端的功率 ( P t ),發射和接收天線的增益 ( G tx和G rx)、工作頻率(通過波長 λ)和目標的雷達橫截面(σ):

λ 4 /(4 π ? R ) 4表示 雙向自由空間損失,而 (4 π ? σ )/ λ 2 表示目標上的反射。鏈路預算和對雷達方程的不同貢獻如圖 2 所示。
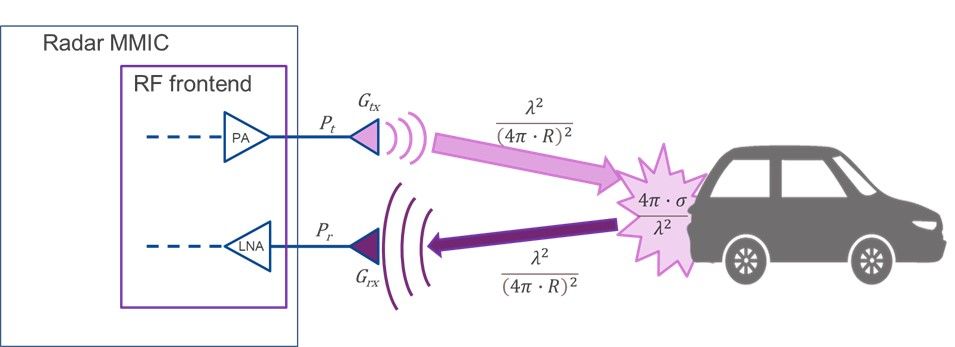
圖 2:雷達系統鏈路預算示意圖。
在其系統參考文件 ETSI TR 103 593 V1.1.1 (2020-05) “傳輸特性;77 GHz 至 81 GHz 頻率范圍內地面車輛應用的無線電測定設備的技術特性”,歐洲電信標準協會 (ETSI) 提供了一組不同雷達操作模式下天線增益的假設值(見表 1 ) 和接收鏈的最小檢測功率 (-110dBm)。還列出了典型目標的參考雷達截面值(表 2)。
表 1:根據 ETSI TR 103 593 V1.1.1 (2020-05) 對雷達傳感器天線增益的假設(假設 Gtx=Grx)。
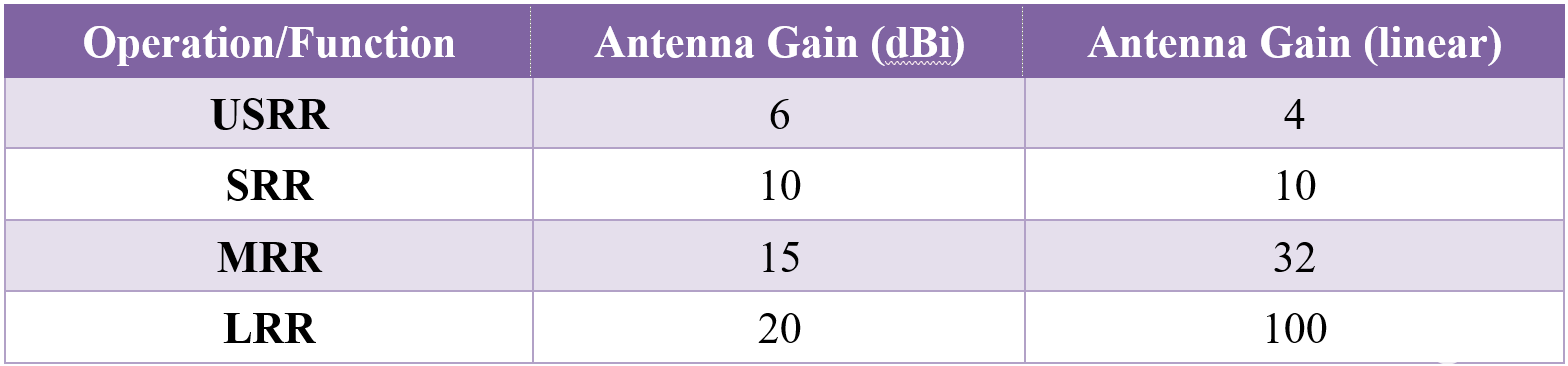
表 2:根據 ETSI TR 103 593 V1.1.1 (2020-05) 的典型目標的雷達橫截面值。
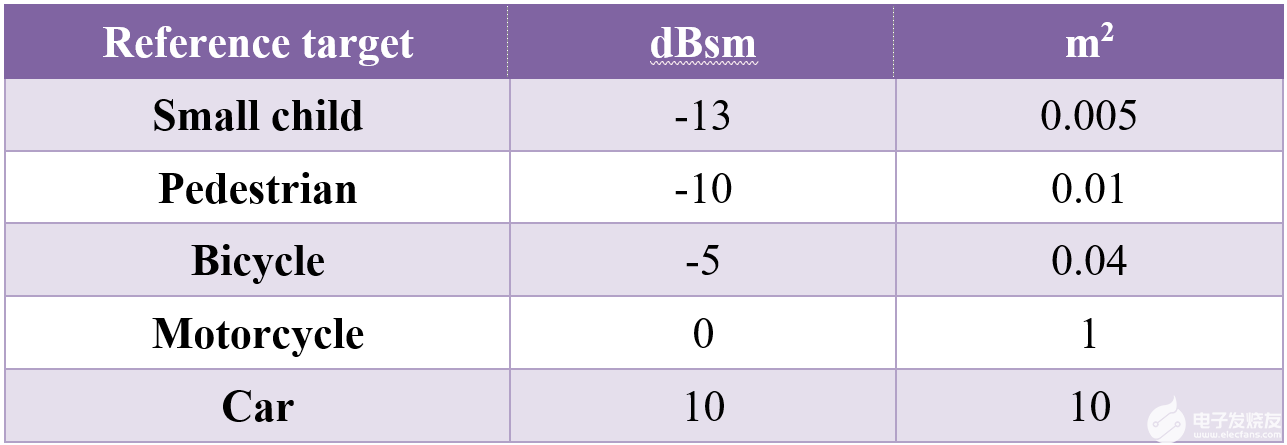
這些值可用作評估和比較不同雷達系統理論性能的基準。
1.2 雷達MMIC
如今,這些收發器是硅 RFIC(射頻集成電路),不僅可以在單個芯片上集成多種功能,而且還可以根據汽車雷達的要求具有多個發射和接收通道。過渡到 CMOS(互補金屬氧化物半導體)將降低雷達 MMIC 的成本和功耗。CMOS 還完全不受溫度變化的影響,這是惡劣汽車環境中的理想特性。收發器 MMIC 的框圖示例如圖 3 所示。
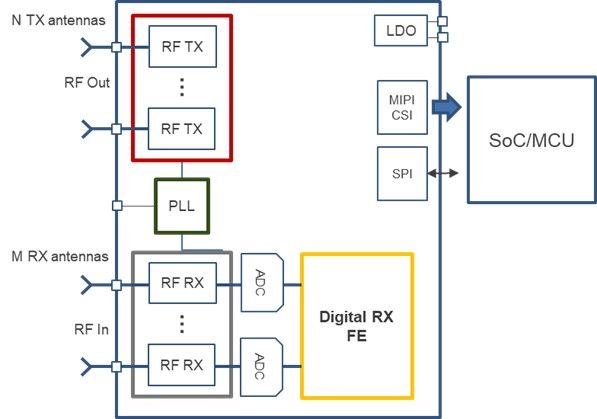
圖 3:多通道雷達 MMIC 收發器的簡化框圖。
雷達系統的整體性能將受到雷達 MMIC 收發器中模擬射頻發射和接收性能的強烈影響。在范圍限制的情況下,需要考慮兩個主要參數:發射器的輸出功率和接收器的噪聲系數。
1.2.1 發射功率
MMIC 的每個傳輸鏈提供的功率將是雷達性能的關鍵。為此,我們必須考慮射頻功率放大器的輸出功率。基于該參數,并考慮上述雷達方程,在理想情況下,給定接收器靈敏度 (P rmin ) 的最大可達到范圍可計算為:

這個方程表明,增加發射功率 P_t 將自動擴展雷達的范圍。例如,遠程雷達 (LRR) 的輸出功率增加 1dB 將使我們能夠檢測到自行車 2.8 m、摩托車 6 m 和典型汽車 11 m,如圖 4 所示。高速行駛時在高速公路上,這可能意味著按時制動或撞到意外的交通障礙物之間的差異。
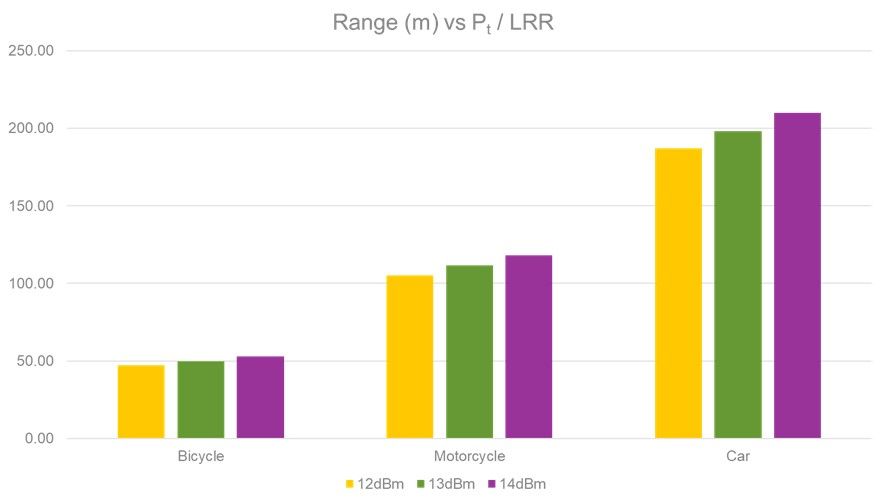
圖 4 LRR 的檢測范圍與射頻輸出功率
但增加輸出功率的好處也可以在短距離應用中看到。對于 USRR(超短程雷達),發射功率增加 1 dB 將意味著增加 35 到 50 cm 或檢測到小孩、行人或自行車,如圖 5 所示。這對于駕駛尤其重要在擁擠的城市環境中,以避免與高度脆弱的受害者發生事故。
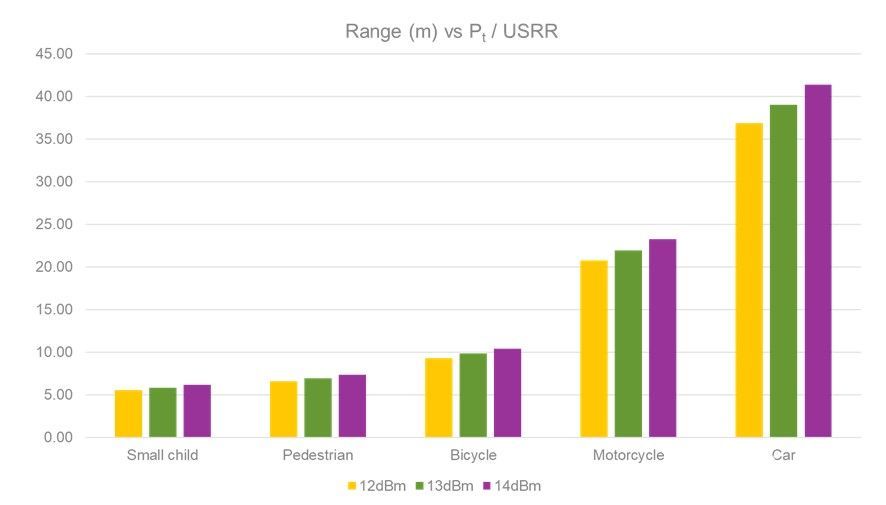
圖 5 USRR 的檢測范圍與射頻輸出功率
當然,這些計算沒有考慮實際場景中的額外損耗(例如下雨、多徑傳播……),所有這些因素都會相對于理想情況降低雷達探測范圍。例如,雷達模塊通常放置在汽車標志或保險杠后面。保險杠面板將引入 2 到 8 分貝的損失,具體取決于它們的成分和油漆。這意味著在檢測范圍內損失了 11% 到 37%。提供盡可能多的輸出有助于解決這個問題。因此,優化射頻發射鏈的性能,尤其是功率放大器的最后一級,是至關重要的。
1.2.2 噪聲系數
除了檢測閾值外,系統還需要最小信噪比 (SNR) 來執行雷達處理。雷達接收機的 SNR 是接收功率P r與噪聲功率N之間的比值。它可以從考慮環境溫度T和信號持續時間T meas的雷達方程中推導出:

其中k是波爾茲曼常數,F是噪聲因子(以 dB 為單位,噪聲系數NF),它解釋了接收器的噪聲貢獻。
給定一定的檢測閾值SNR min,理論上可達到的最大范圍可以確定為:

該方程表明,通過降低噪聲因子 F(以及相反的噪聲系數 NF),雷達探測范圍將增加。讓我們假設系統需要 20dB 的 SNR 閾值,并考慮與上述相同的示例。
在 LRR 的情況下,如圖 6 所示,將噪聲系數降低 1dB 將使范圍增加 4m(自行車)、10m(摩托車)和 13m(汽車)。
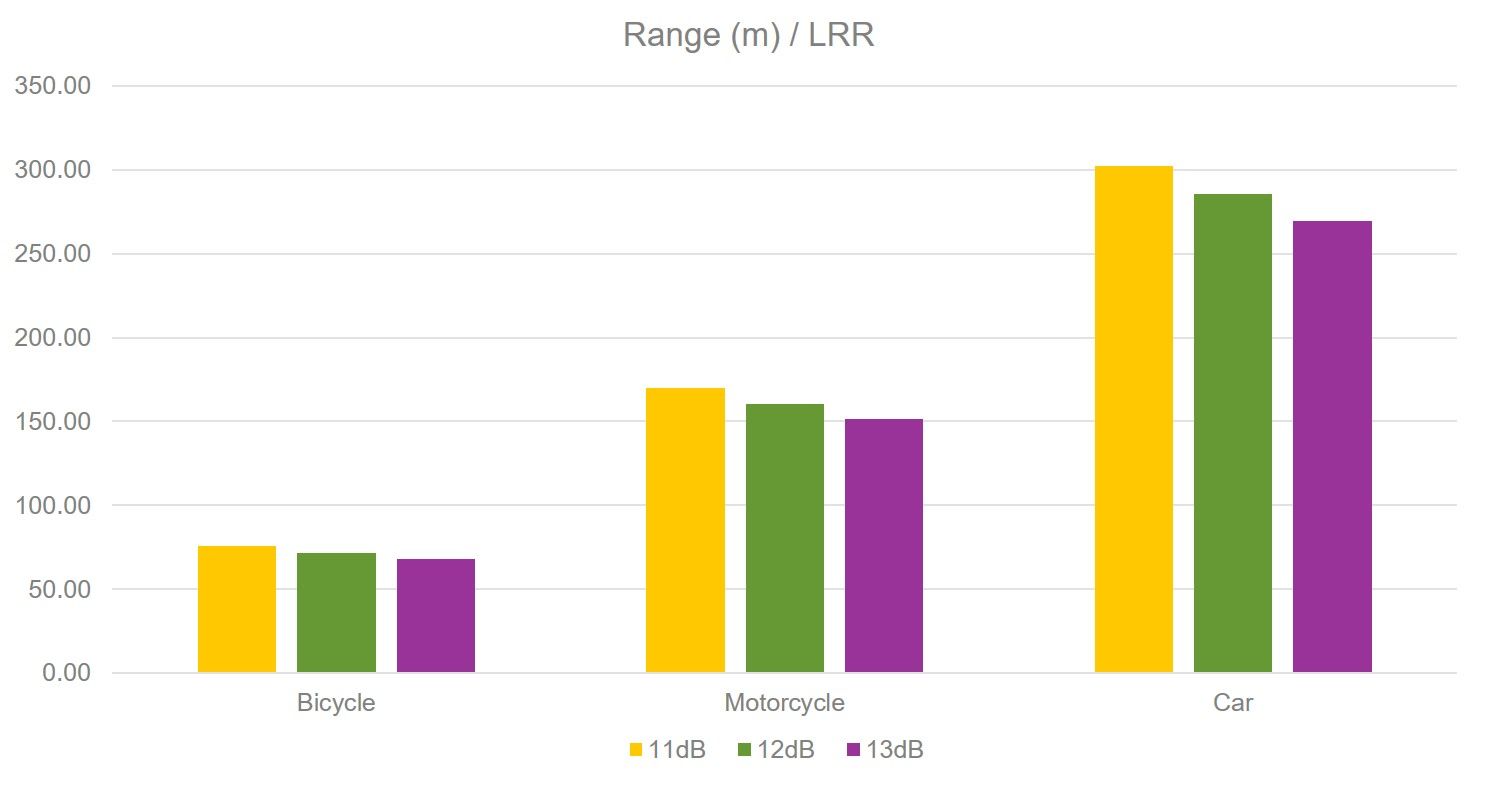
圖 6 LRR 的檢測范圍與噪聲系數
這種范圍增加在短距離范圍內也很顯著,通過降低 1dB 的噪聲系數,可以贏得 50cm 到 1m 的距離,以檢測最脆弱的交通參與者(兒童和成人行人和自行車),如圖 7 所示。
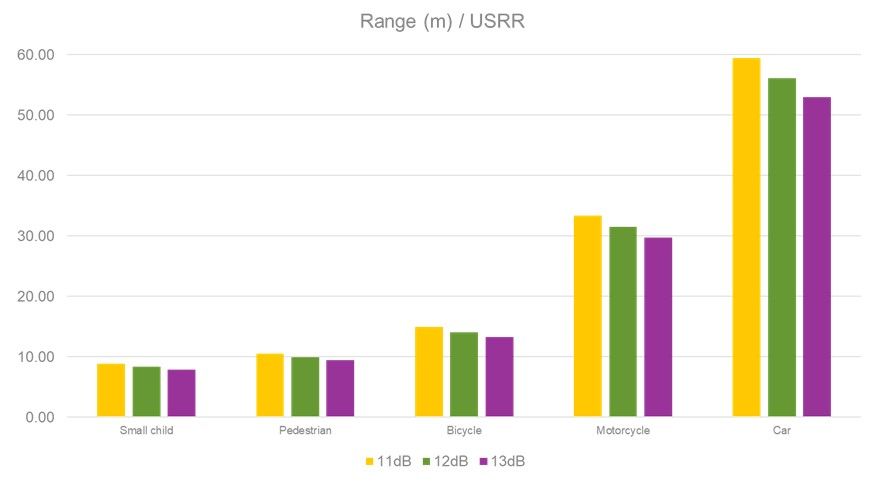
圖 7 USRR 的檢測范圍與噪聲系數
因此,接收器鏈的噪聲系數也將成為雷達 MMIC 收發器設計的關鍵參數。由于噪聲的主要貢獻者是模擬接收鏈中的第一個放大器(圖 8),因此雷達 MMIC 收發器中的 LNA 應經過精心設計和優化以實現低噪聲系數。
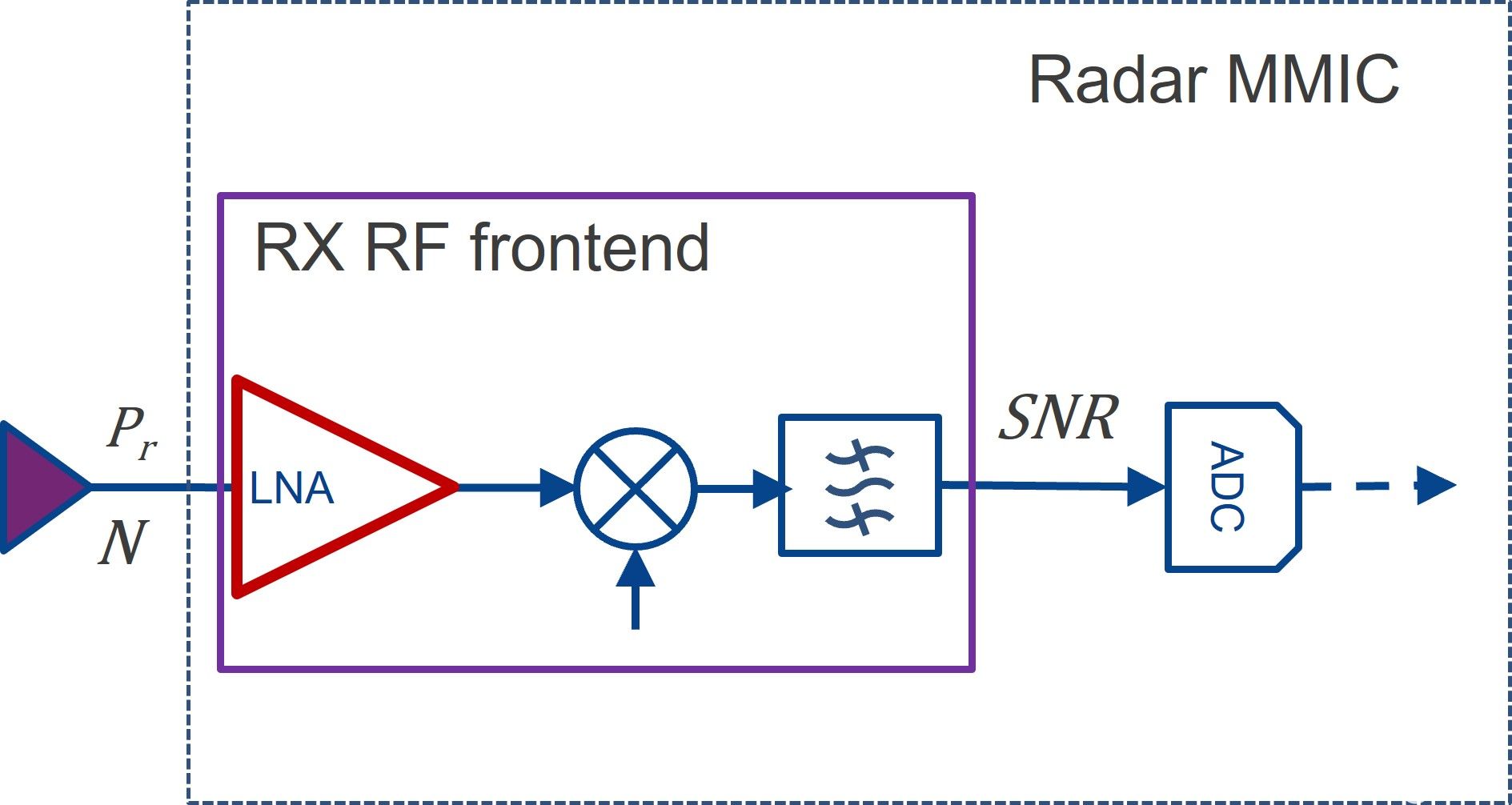
圖 8 射頻接收鏈的簡化圖。
1.2.3 設計權衡
鑒于這些結果,如果我們想通過優化雷達 MMIC 收發器的 RF 性能來擴展雷達系統的范圍,則有兩個關鍵的設計參數,即輸出功率和噪聲系數。它們中的任何一個更好的性能都會增加檢測范圍。但是應該選擇哪一個進行優化?
擁有更高的輸出功率將有助于補償由現實生活環境造成的額外損失。此外,它將提供更好的抗干擾保護。另一方面,MMIC 會有更高的功耗和功耗。這個問題將隨著更多傳輸通道的集成而增加。
如果功耗很關鍵,調整噪聲系數可能是更好的選擇。這是節能 MMIC 的優雅解決方案。然而,低噪聲系數將需要更高的 RX 增益,這反過來會影響接收器的線性度。此外,對干擾的保護可能較少,因為不需要的信號將沿著所需的信號被放大。
理想情況下,考慮到所選半導體技術和整體系統設計的局限性,兩者都應盡可能地進行調整。
1.3 結論
在本條目中,介紹了雷達距離檢測的限制和設計參數。當然,我們只關注 MMIC 的射頻性能。雷達 MMIC 還有一些附加參數可以限制范圍,例如模數轉換器 (ADC)。還可以通過優化數字接收和處理鏈來增加范圍,從而可以獲得有用的信號以降低接收功率和 SNR。
審核編輯:郭婷
-
半導體
+關注
關注
335文章
28609瀏覽量
232588 -
射頻
+關注
關注
106文章
5728瀏覽量
169742 -
adc
+關注
關注
99文章
6639瀏覽量
548260
發布評論請先 登錄

激光雷達技術:自動駕駛的應用與發展趨勢

激光雷達光電組件的AEC-Q102認證:保障自動駕駛硬件的可靠性與品質

汽車雷達回波發生器的技術原理和應用場景




康謀分享 | 直面AD/ADAS快速開發挑戰:IVEX自動駕駛場景管理及分析平臺!






 工商網監
工商網監
評論