 KUKA C4機器人報:KSS13012<{總線識別號}>ECat Stack初始化時出錯
KUKA C4機器人報:KSS13012<{總線識別號}>ECat Stack初始化時出錯
可能的原因
1.原因:在VorkVisual項目中RDC
代替micro-RDC
解決用WorkVisual糾正配置
2.原因:WorkVisual中SYS-X42
配置錯誤
解決方用WorkVisual糾正配置
3.原因:KPC和CCU之間的連接(現場出的時候的主要原因)
有故障
解決方
更換錯誤布線
4.原因:OfficePC上的EtherCAT未正確連接(現場出的時候的主要原因)
解決
更換錯誤布線
下面看一下由于CCU引起的故障:
KPC和CCU之間的連接有故障
說明
KUKA控制器總線(KCB)的布線有故障。
通過以下電纜線路進行布線:
·CCU(X31)
·電纜W166356
。KPC
CCU上的X31接口
檢測指令
1.檢查插頭連接器是否已正確連接。在此過程
中,需特別注意以下幾點:
·針腳是否已壓入
·是否有腐蝕
·觸點是否被燒壞
。插頭端子是否已頂出
·插頭是否被插入正確的插槽
2.檢查插頭連接器是否具有電氣功能。在此過
程中,需特別注意以下幾點:
·芯線相互間有無錯接
·接地芯線是否短路
·是否按照電路圖正確布線

-----------------END---------------------
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
連接器
+關注
關注
99文章
15224瀏覽量
139301 -
RDC
+關注
關注
0文章
26瀏覽量
9310
原文標題:KUKA C4 機器人報:KSS13012<{總線識別號}>ECat Stack初始化時出錯
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
基于LockAI視覺識別模塊:C++輪廓檢測
基本知識講解
1.1 圖像處理的重要性
目標檢測:圖像處理技術可以用于檢測圖像中的特定對象或特征。
應用場景:廣泛應用于物體識別、工業自動化、機器人導航、自動駕駛等領域。
常見任務:
邊緣檢測:提取圖像
發表于 05-22 10:05
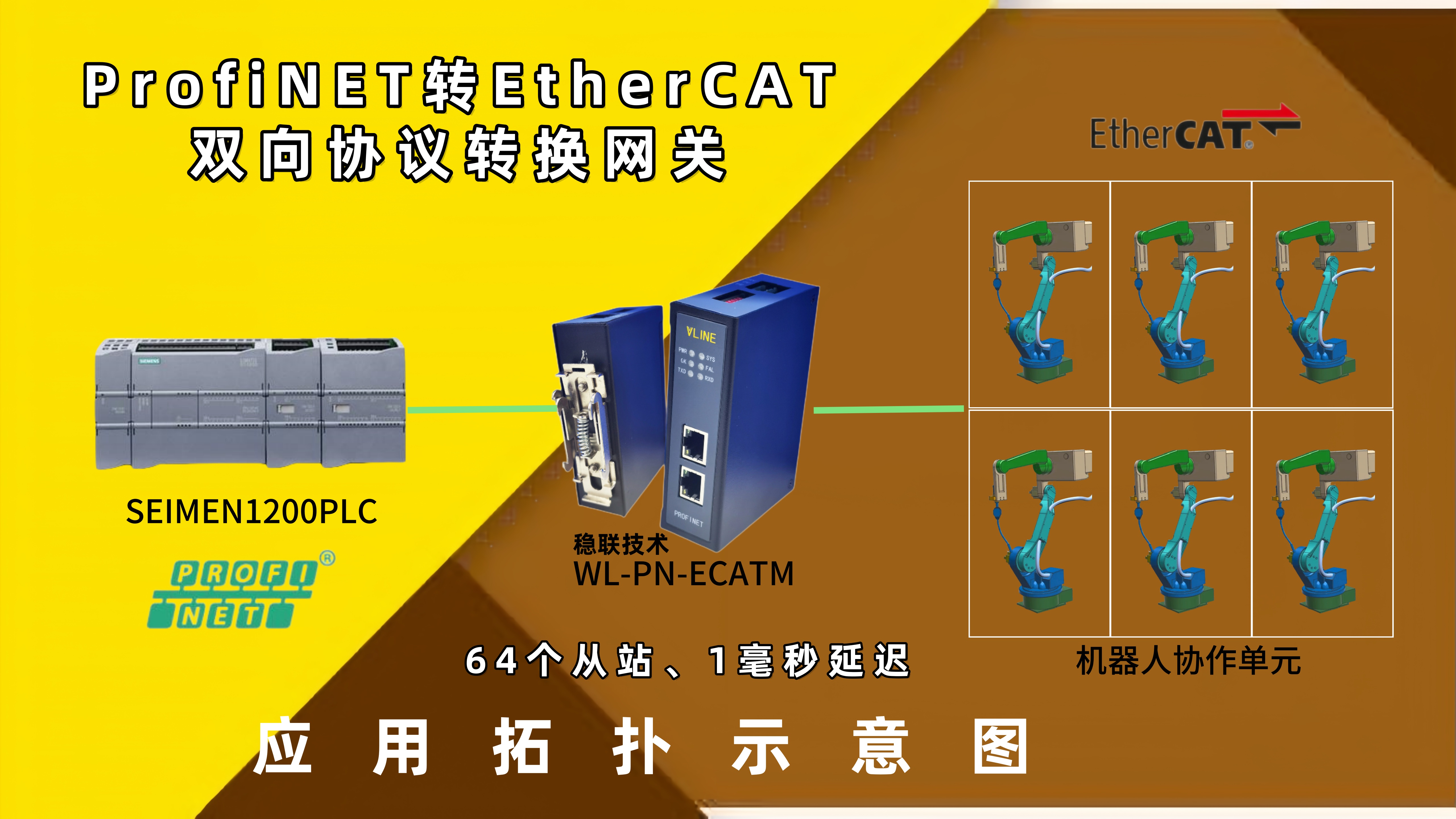
機器人手臂&quot;聽不懂&quot;指令?EtherCAT轉PROFINET網關妙解產線通信僵局
協作機器人(如KUKA iiWA)使用EtherCAT控制,與Profinet主站(如西門子840D CNC)同步動作。
基于Profinet-EtherCAT網關-穩聯技術WL-PN-ECATM
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人
發表于 04-30 01:05
k32l2b31寫入LPUART1-&gt;STAT |= (1&lt;&lt;25)會導致semihost_hardfault是為什么?
我想在 k32l2b31 上激活 LIN Break 檢測
必須在狀態寄存器中設置位 LKDE
i try LPUART1-&gt;STAT |= (1&lt;&
發表于 04-08 06:36
LCD_SPI_X-&gt;DAT = (uint16_t)dat; while((LCD_SPI_X-&gt;STS &amp; SPI_I2S_BUSY_FLAG)!=(uint16_t)RESET){}
;
(void)LCD_SPI_X-&gt;STS;
}
確保電源和復位穩定?
上電后增加延時再初始化外設:
c
Copy Code
SystemCoreClockUpdate
發表于 04-02 14:29
庫卡KUKA機器人常見故障維修
1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發動機過載或頻繁啟動

開源項目!能夠精確地行走、跳舞和執行復雜動作的機器人—Tillu
的語音識別系統響應語音指令
為什么打造Tillu?
打造Tillu不僅是一個項目,更是一次學習體驗。通過深入探索機器人技術、編程細節以及自定義動作和表情,釋放你的創造力。無論你是學生、愛好者還是創
發表于 01-02 17:24
開源項目!用ESP32做一個可愛的無用機器人
簡介
作者在完成碩士論文答辯后,利用空閑時間制作了一個他一直想做的機器人——可愛無用機器人。
無用機器人原理是一個連接到開關的電機,通過邏輯門控制。當開關被推到“開”時,機器人啟
發表于 08-30 14:50
初始化sn65dsi后,讀取0XE5寄存器,值一直為0x80,為什么?
?
mipi輸出480M。
lvds-format = ;
out-face = ;
clock-frequency = &lt;85500000&gt;;
發表于 08-15 06:27
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
本帖最后由 Tronlong創龍科技 于 2024-7-19 17:18 編輯
ROS系統是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統。它
發表于 07-09 11:38
Al大模型機器人
理解能力強大: AI大模型機器人可以理解和生成自然語言,能夠進行復雜的對話和語言任務。它們能夠識別語言中的語義、語境和情感,并據此作出適當的回應。廣泛的知識儲備: 這些模型基于大規模的數據集進行訓練,擁有
發表于 07-05 08:52






 工商網監
工商網監
評論