 基于EAIDK310的視覺導航自動駕駛小車
基于EAIDK310的視覺導航自動駕駛小車
2021研電賽已經告一段落啦 ~
小編為大家整理了獲獎作品集,在每周一為大家分享獲獎作品,記得來看連載喲 ~
團隊介紹
參賽單位:上海應用技術大學
參賽隊伍:EAIDK666
指導老師:蔣文萍 丁肇紅
參賽隊員:溫曉靜 孫亦劼 杜為棟
獲獎情況:"ARM"企業專項全國一等獎,全國總決賽三等獎,上海賽區三等獎
作品背景
汽車行業已經進入了一個顛覆性的革新時代,這個時代里面,智能化是一個必然的趨勢。相對傳統的人工駕駛,自動駕駛在安全,便捷,效率上有著巨大的優勢。目前,我國已有自動駕駛汽車正在投入試用,于規定道路上取得一定成果。一方面自動駕駛的發展趨勢方興未艾,自動駕駛技術成為當前的主流研究方向。另一方面,中國在芯片電子領域在國際上處于被打壓的形勢下,本著挑戰自我熟悉國產芯片的原則選擇了該ARM中國企業命題,該賽題由安謀中國和OPEN AI LAB聯合設計,該自動駕駛賽題圍繞具體應用場景,結合傳感器、算法和指定控制設備,以達到搭建完整應用產品。
技術難點與創新點
技術難點
軟件移植:由于EAIDK310不像樹莓派那樣是一款比較大眾的開發板,其網上資料有限,如何完成已經在其他開發板的功能即軟件移植是第一大難點。
性能調優:EAIDK310板載芯片是瑞芯微的RK3228H,EAIDK310參數見官網。作為一款入門級嵌入式AI處理器想要實現基于圖像識別的自動駕駛還是有很大的性能瓶頸,因此性能調優是第二大難點
使用門檻:由于該命題為企業命題,而非開放命題,沒有任何實現準備工作或者傳承,面對一塊陌生的開發板陌生的系統陌生的芯片,在有限的時間內將其跑通完成賽題指定任務是一個很大的門檻。
創新點
硬件上采用了雙攝像頭架構:一個是用于采集車身在道路上位置的俯視安裝的攝像頭,其前瞻大約兩倍車身長度,一個是用于采集行人交通標識等路況信息的平時安裝的微廣角攝像頭。雙攝像頭的架構極大提高了圖像采集和處理的效率,降低了軟件分割處理圖像的壓力。
軟件架構:由于EAIDK310平臺綜合各方面因素,摒棄使用業界常用的ROS作為解決方案,而是使用了一個輕量級的數據緩存庫Redis和DSDL來實現和ROS類似的功能,使得程序耦合性降低,以較低的成本實現了一種跨進程跨節點跨語言且較高性能的架構。
算法優化上關于圖像識別部分采用了Tengine邊緣推理框架進行了性能調優加速,使整個系統的實時性得以提高。
實用價值
得益于該作品在硬件和軟件架構上的創新,提出了一套成本低效率高的嵌入式視覺導航框架,使得研究該技術的硬件成本門檻降低,不僅僅在自動駕駛,該作品提出的基于Redis的軟件方案在嵌入式系統中都是一個不錯值得復制借鑒的框架。此外該作品最后實驗結果驗證了Tengine在嵌入式平臺上優異的表現,為嵌入式系統運行AI推理優化加速調優提供了思路。
系統設計
系統架構圖
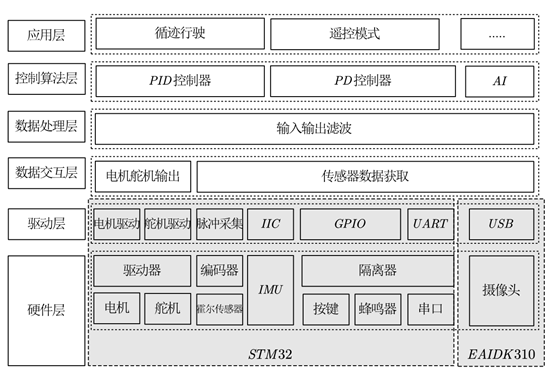
本設計整體的系統構如圖所示,從下至上依次有硬件層,驅動層,數據交互層,數據處理層,控制算法層和應用層。
硬件層是本設計最直觀的物理體現形式,主要包括電機、舵機、轉速傳感器IMU傳感器按鍵蜂鳴器等。
驅動層是與硬件直接進行交互使其運行起來的的最底層軟件,包括驅動電機舵機的PWM,獲取轉速傳感器的輸入捕捉,驅動IMU的IIC總線,以及用于人機,機機交互的GPIO和UART。
數據交互層是連接底層與上層的關鍵一層,它是對驅動層從數據流的角度進一步的抽象和封裝,為上層應用對底層硬件的訪問控制提供了統一的接口和權限的控制。
數據濾波層是數據經過的第一層處理,主要提供了對數據最基礎的數學運算變換以及數字信號處理手段。基于底層提供的原始數據或者處理過的數據,控制算法層將這些數據帶入到實際模型中完成對模型的控制。
應用層是最上層的邏輯處理層,在這一層實現了最具體的功能,例如讓小車循跡行駛、以及小車自主行駛策略控制等均在應用層完成。下面對本架構從硬件和軟件的角度展開闡述。
硬件架構圖
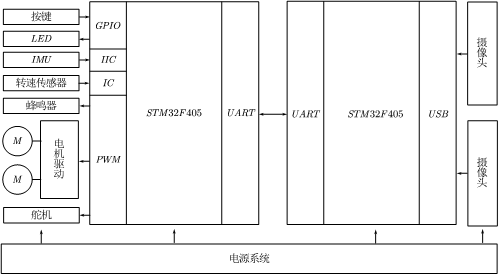
上圖為本設計的系統總體硬件框架圖,硬件系統采用主控制器加輔助控制器的架構。主控制器即EAIDK310開發板板載RK3228H處理器,輔助處理器為STM32F405處理器。主控制器負責攝像頭數據采集處理,以及主要控制算法執行。輔助處理器是一個32位單片機,主要負責電機驅動,速度轉向控制,以及車身姿態解算。
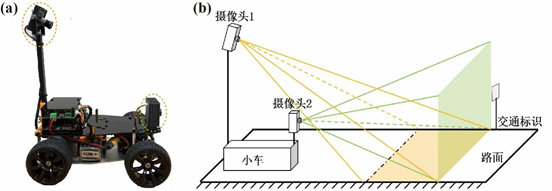
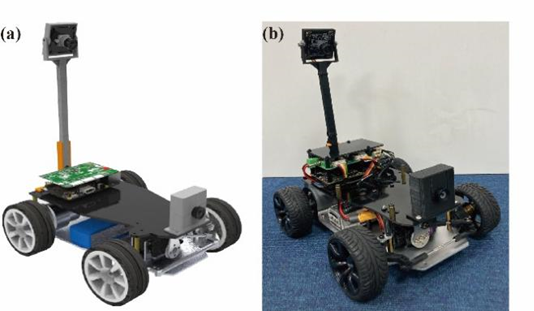
特別地,在主處理側采用的是雙攝像頭方案,如下圖(a)所示,其中攝像頭1是用于采集車身在道路上位置,其安裝于車身后方高度約15cm的位置,安裝角度12到15度,安裝高度和安裝角度共同決定其前瞻大約兩倍車身長度,攝像頭2采用微廣角攝像頭,用于采集小車前方行人交通標識等實時路況信息,該攝像頭安裝于車頭,正視小車前方視野。雙攝像頭方案的視野示意圖如圖(b)所示,相比單攝像頭方案,雙攝像頭采集到的數據分別可以直接用于道路識別分割和交通標識處理,從而減少了處理器對圖片的預處理工作。
軟件架構
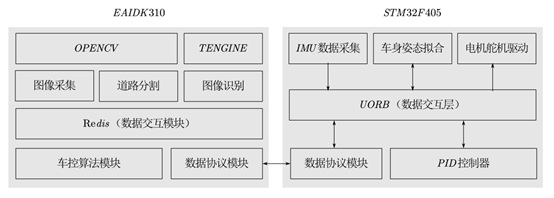
與硬件系統對應地,軟件也分為兩部分,其架構圖如圖所示,主要分為主處理器端和輔處理器端,在主處理器端,采用opencv進行圖像采集以及基本處理,采用Tengine實現人工智能訓練模型的推理計算。其數據處理及計算的所有結果均寫入redis供其他程序(車控算法、數據協議、圖像識別等模塊)調用。車控驅動是用python編寫的一個與STM32單片機串口通信的節點,其通過實時讀取redis中來自上層應用程序(車控算法)對小車的控制指令并隨即通過串口協議發送給輔處理器端指揮小車做出相應動作。
系統測試
最終小車的設計圖和整體圖如圖所示
交通標識道具

數據集

賽道分割巡線
交通標識識別
未來展望
基于作品中提出的Redis和DSDL實現的機器人框架基礎進行進一步的完善和補充,使其成為ROS的一個可替代選擇,特別是在低性能處理器上。
總結
經過本次對EAIDK310的探索學習,以實際需求為應用背景,實現了自動駕駛基于雙攝像頭的自動駕駛Demo。
針對最初的功能需求,分別對巡線,交通標識識別進行了測試。由于巡線采用的是基礎的機器視覺算法,對于背景復雜的路況的效果不是很理想,但是對于簡單的賽道巡線效果非常好。
交通標識識別采用的是機器學習算法,前期在測試過程中記錄了大量的訓練數據供其訓練,由于訓練數據和實際驗證場景相同,因此得到了較好的識別效果。
本次項目表明即使RK3228H處理器的性能限制不能跑大型AI模型算法,但得益于基于Redis的數據交互框架和Tengine邊緣推理計算框架,使得基礎嵌入式設備在AI項目中也可以發揮其作用,是一種低成本的解決方案。
參賽感悟
首先非常感謝安謀中國對我們團隊作品的肯定,我們團隊作品的獲獎情況比較兩極分化,在橫向評比的上海賽區獲得三等獎,在縱向評比的ARM企業命題獲得一等獎,不出所料在同樣是橫向評比的全國賽區還是三等獎,其實不管是三等獎還是一等獎我們團隊都是可以接受的。
清晰記得我們去上海賽區參加比賽時我們去看其他參賽團隊的作品海報時的震撼,我們的作品時如此的樸實無華,沒有看不懂的題目,沒有高大上的技術,也更沒有雄厚的資金支持,我們當時的小車的攝像頭由于經費問題還是用的十年前用來QQ視頻聊天的那種攝像頭。所以給我們評三等獎我們也覺得我們確實不如其他團隊的作品。
但是,企業賽題給我們評為一等獎我們也覺得我們是值得這個分肯定,我們做的雖然沒有那么高大上,但所做工作緊靠賽題,沒有絲毫偏題,一步步走來,扎扎實實,一步一個腳印,遇到問題逐個克服....
剛剛拿到EAIDK310開發板時陷入了平均一天重裝兩次系統的困境,要不是因為裝軟件裝的內存不足了,要不是裝軟件裝的系統崩潰了,幾乎不能和這塊板子好好相處。后來總算學會了使用 rsync 備份系統以后這個情況才得以改善,但只是重裝系統變成了恢復系統,至少比之前進步了,但此時離報名截止還有一個月了,然后又陷入了跟OpenCV死磕,跟ROS死磕,跟pygame死磕,跟Tengine死磕,跟rockchip死磕。。。。的困境,這塊板子太小眾了,好多軟件包都得自己編譯,而且性能不是很高,在別的平臺上跑通的在這里跑的很拉跨,直到最后我們拍板定下來放棄使用ROS放棄使用那么多依賴,一切自己重頭來并使用一塊STM32輔助處理器我們的工作才步入正軌,但話又說回來站在巨人的肩膀上不是更好嗎,這時我們劍走偏鋒瞄準了在互聯網領域如數家珍的Redis(做嵌入式的同學可能對這個不是很了解),Redis和DSDL結合不就是一個輕量級的ROS框架嘛,說干就干,看是研究Redis的源碼,研究DSDL的源碼,總算在報名截止前一周我們實現了基礎的框架模型,小車可以動起來了,各個節點之間通訊打通了,這個時候我們才確定報名ARM賽題,給隊伍起了EAIDK666隊的隊名,申請了開發板(之前那塊自掏腰包買的)圖像識別我們認真學習了公開課的視頻,對數據集進行了擴充并重新訓練模型部署,此時馬上就要報名截止了,我們PPT還沒有做,視頻還沒有錄。。。。一直在和時間賽跑
就這樣我們扎扎實實一步一步走來一等獎是對我們極大的肯定和鼓勵!
一定是對安謀中國的感激讓我堅持到現在把這個分享寫完,截止今天(2021年8月27日)我剛剛參加完暑假的最后一個比賽的決賽(集創賽),我的暑假幾乎是在競賽中度過的,這個比賽結果我已經沒有任何期待了,因為此時此刻我只想好好休息,我真的太累了,感謝安謀中國對我們作品的肯定。最后還是感謝安謀中國感謝我的導師!
由于作品中有些內容正后續要寫論文投稿所以寫的不是很詳細,等論文投出去一定和大家分享,還有Redis和DSDL造出來的框架若各種條件都允許我們會將源碼公開出來拋磚引玉。
原文標題:【2021研電賽作品分享】第十八期 | 基于EAIDK310的視覺導航自動駕駛小車
文章出處:【微信公眾號:安芯教育科技】歡迎添加關注!文章轉載請注明出處。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2564文章
52724瀏覽量
764746 -
芯片
+關注
關注
459文章
52308瀏覽量
437878 -
自動駕駛
+關注
關注
788文章
14246瀏覽量
169961
原文標題:【2021研電賽作品分享】第十八期 | 基于EAIDK310的視覺導航自動駕駛小車
文章出處:【微信號:Ithingedu,微信公眾號:安芯教育科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
純視覺的自動駕駛會有哪些安全問題?

純視覺自動駕駛如何理解路邊畫報上的人?

2024年自動駕駛行業熱點技術盤點
從《自動駕駛地圖數據規范》聊高精地圖在自動駕駛中的重要性

馬斯克重申:純視覺是自動駕駛的未來
自動駕駛中常提的SLAM到底是個啥?

自動駕駛汽車安全嗎?


自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術

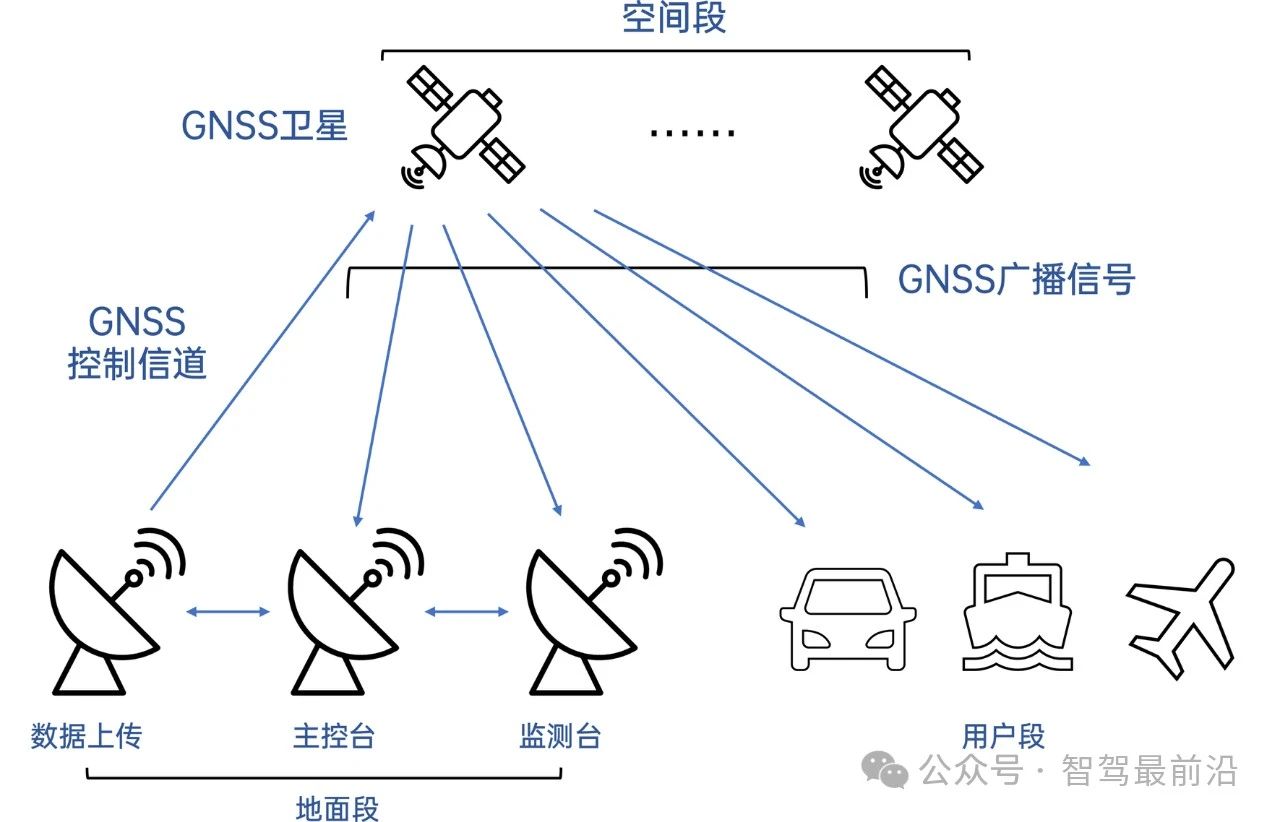
為什么自動駕駛中全球導航衛星系統如此重要?





 工商網監
工商網監
評論