") 基于Omniverse的NVIDIA Isaac Sim現(xiàn)已發(fā)布公測版
基于Omniverse的NVIDIA Isaac Sim現(xiàn)已發(fā)布公測版

全新Isaac模擬引擎不但能夠創(chuàng)造更逼真的環(huán)境,而且還能簡化合成數(shù)據(jù)生成和域隨機化,從而建立真值數(shù)據(jù)集來訓練用于物流、倉庫、未來工廠等的各種機器人。

Omniverse是NVIDIA模擬器的根本基礎,包括加入了多項新功能的Isaac平臺。NVIDIA Isaac Sim目前已發(fā)布公測版,您可以通過該平臺探索更高級的機器人模擬功能。
Isaac Sim基于NVIDIA Omniverse平臺而構建,它是一個機器人模擬應用與合成數(shù)據(jù)生成工具。機器人專家可使用它更高效地訓練和測試機器人,模擬機器人與指定環(huán)境的真實互動,而且這些環(huán)境可以超越現(xiàn)實世界。
Isaac Sim的發(fā)布還增加了經(jīng)過改進的多攝像頭支持功能、傳感器功能以及一個PTC OnShape CAD導入器,讓3D素材的導入變得更加輕松。從實體機器人的設計和開發(fā)、機器人的訓練,到在“數(shù)字孿生”中的部署(數(shù)字孿生是一種精確、逼真的機器人模擬和測試虛擬環(huán)境),這些新功能將全方位地擴大可以建模和部署的機器人和環(huán)境范圍。
主要新功能
●支持多攝像頭
●帶合成數(shù)據(jù)的魚眼相機
●支持ROS2
●PTC OnShape導入器
●經(jīng)過改進的傳感器支持
- 超聲波傳感器
- 力傳感器
- 自定義激光雷達模式
●可從NVIDIA Omniverse Launcher中下載
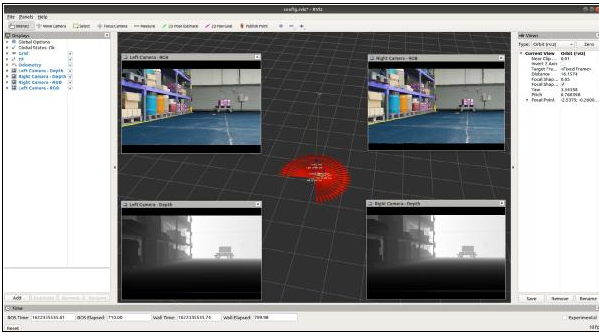
Isaac Sim可以將多攝像頭傳感器數(shù)據(jù)發(fā)送到Rviz(ROS可視化工具)
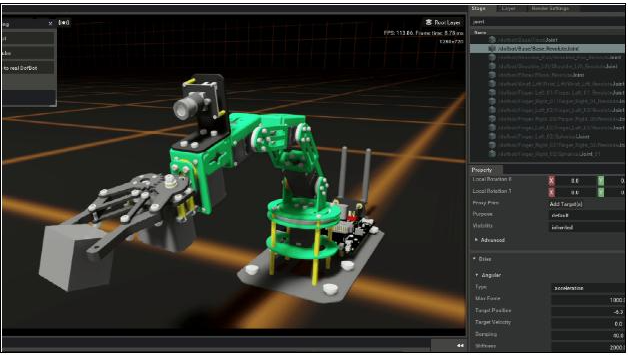
在Isaac Sim中控制Dofbot操作機器人
Isaac Sim實現(xiàn)了更多的機器人模擬
開發(fā)者早已明白強大的模擬環(huán)境對機器人測試和訓練的益處,但此類模擬器往往存在著限制其使用的缺點。Isaac Sim通過以下優(yōu)勢來彌補這些缺點。
逼真的模擬
為了提供逼真的機器人模擬,Isaac Sim運用了Omniverse平臺的強大技術:使用PhysX 5進行高級GPU物理模擬、借助實時光線追蹤和路徑追蹤實現(xiàn)高逼真度,以及支持物理渲染的材質定義語言(Material Definition Language ,MDL)。
模塊化設計與豐富的應用
Isaac Sim專為解決許多最常見的機器人用例而創(chuàng)建,包括操控、自主導航和用于訓練數(shù)據(jù)的合成數(shù)據(jù)生成。其模塊化設計能夠讓用戶輕松自定義和擴展工具集,以適應多種應用和環(huán)境。
無縫連接和互操作性
借助NVIDIA Omniverse,Isaac Sim可以使用Omniverse Nucleus和Omniverse Connectors在通用場景描述(USD)中合作構建、分享、導入環(huán)境模型與機器人模型。通過ROS/ROS2接口或功能齊全的Python腳本,以及用于導入機器人模型和環(huán)境模型的插件,可以輕松地讓機器人的大腦與虛擬世界相連。
Isaac Sim的合成數(shù)據(jù)生成助力實現(xiàn)機器學習
合成數(shù)據(jù)生成是一個重要的工具,它正在被越來越多地用于訓練當今機器人的感知模型。獲取真實世界的、正確標記的數(shù)據(jù)是一項耗時且成本高昂的工作。 但就機器人技術而言,在現(xiàn)實世界中收集某些所需的訓練數(shù)據(jù)可能太困難或太危險。 對于必須靠近人類工作的機器人來說尤其如此。
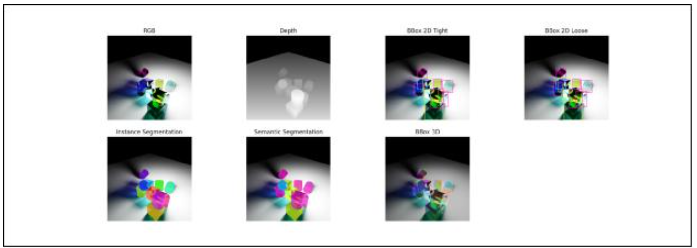
Isaac Sim 內置了對訓練感知模型很重要的各種傳感器類型的支持。這些傳感器包括 RGB、深度、邊界框和分割。
玻璃物體的真值合成數(shù)據(jù)
在公測版中,我們能夠輸出KITTI格式的合成數(shù)據(jù)。這些數(shù)據(jù)可以直接用于NVIDIA遷移學習工具包,以使用特定用例數(shù)據(jù)提高模型性能。
域隨機化
域隨機化能夠對定義模擬場景的參數(shù)進行更改,如場景中的照明、顏色和材質紋理等。域隨機化的主要目標之一,便是通過將神經(jīng)網(wǎng)絡暴露在所模擬的各種域參數(shù)中,來加強機器學習(machine learning ,ML)模型的訓練。這有助于模型在真實世界場景中實現(xiàn)有效的泛化。實際上,這項技術能夠教會模型忽略不重要的內容。
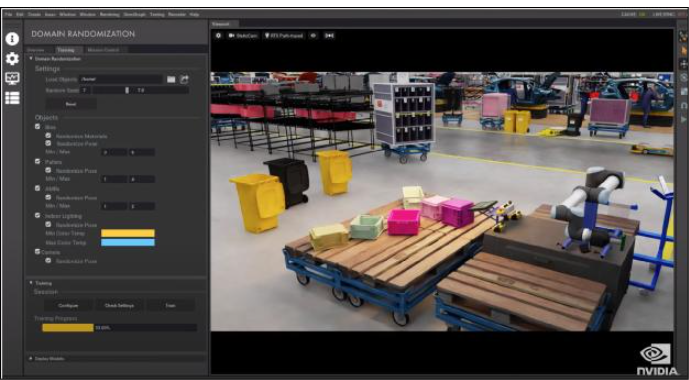
工廠場景的域隨機化
Isaac Sim能夠對定義一個特定場景的多個不同屬性進行隨機化。借助這些功能,機器學習工程師可以確保合成數(shù)據(jù)集包含足夠的多樣性來驅動穩(wěn)健的模型性能。

在Isaac Sim公測版中,我們通過允許用戶定義隨機化區(qū)域來增強域隨機化功能。開發(fā)人員現(xiàn)在可以在場景中要隨機化的區(qū)域周圍繪制一個框,場景的其余部分將保持靜態(tài)。
-
機器人
+關注
關注
213文章
29739瀏覽量
212868 -
NVIDIA
+關注
關注
14文章
5309瀏覽量
106404 -
CAD
+關注
關注
18文章
1114瀏覽量
74319
發(fā)布評論請先 登錄
Isaac Sim公測版帶來數(shù)字孿生級別的機器人仿真
用NVIDIA Omniverse ISAAC Sim加速機器人仿真
NVIDIA Isaac Sim 2022.1版本的亮點及功能
NVIDIA Isaac Sim機器人仿真平臺上云
NVIDIA AI機器人開發(fā)— NVIDIA Isaac Sim入門
開發(fā)者使用NVIDIA Omniverse和Isaac Sim構建機器人
NVIDIA 公開課 | AI 機器人開發(fā)第二講 — Isaac Sim 高階開發(fā)
借助 NVIDIA Omniverse 最新公測版,任何人都能構建元宇宙應用
CES | 用 NVIDIA Isaac Sim 2022.2 模擬未來智能機器人
GTC23 | NVIDIA 擴大 Isaac 軟件的接入范圍并提高 Jetson 平臺的可用性,加快機器人技術從云到邊緣的發(fā)展
Omniverse 中文課程系列 7:使用 Isaac Sim 實現(xiàn)機器人仿真入門

NVIDIA Isaac Sim與NVIDIA Isaac Lab的更新
NVIDIA Isaac Sim 4.5.0與lsaac Lab 2.0的安裝教程






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論