") 淺析前視主動(dòng)安全攝像頭
淺析前視主動(dòng)安全攝像頭
面對日益加強(qiáng)的法律法規(guī),前視主動(dòng)安全系統(tǒng)將逐漸成為五星安全等級車輛的必須配置。前視主動(dòng)安全攝像頭安裝在前風(fēng)擋玻璃后面,僅通過單目圖像處理即可獲取車道線,跟車車輛,會(huì)車車輛,前方行人,交通標(biāo)志等多種交通目標(biāo)信息。通過獲取的交通目標(biāo)信息,前視主動(dòng)安全攝像頭可以實(shí)現(xiàn)多種主動(dòng)安全以及舒適功能,使車輛駕駛更加安全舒適。
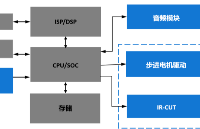
系統(tǒng)使用專用圖像處理芯片對車輛前方圖像進(jìn)行識別和處理,系統(tǒng)可以識別車輛前方的多種目標(biāo)并計(jì)算目標(biāo)參數(shù)信息,包括:
車道線:可識別道線種類,如虛線、實(shí)線、反光點(diǎn),雙線,馬路牙等。可識別車道線距離本車車輪的距離以及撞線速度、加速度等信息。
前方車輛:可識別前方車輛、摩托車、自行車等,同時(shí)識別出車輛的距離、相對速度、CVIP(前方關(guān)鍵車輛)、TTL等關(guān)鍵參數(shù)。
行人:可識別前方多個(gè)行人目標(biāo),包括迎面、側(cè)面、背面、四季不同衣著、舉著雨傘等。并給出行人目標(biāo)距離以及預(yù)計(jì)碰撞時(shí)間。
會(huì)車燈光:可以識別會(huì)車前大燈,并給出目標(biāo)運(yùn)動(dòng)參數(shù),以及智能前大燈應(yīng)避免的晃眼區(qū)域。
交通標(biāo)志:可以識別多種交通標(biāo)志,包括主標(biāo)志和主標(biāo)志下方的輔助標(biāo)識。可以給出交通標(biāo)志的位置以及含義信息。
產(chǎn)品功能
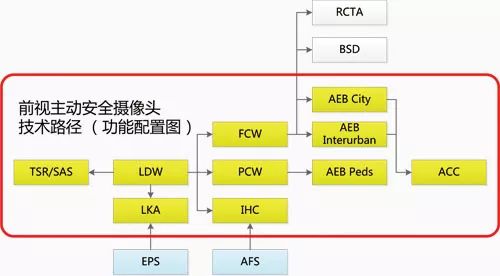
通過提取車輛前方交通目標(biāo)的信息,前視主動(dòng)安全攝像頭可以實(shí)現(xiàn)多種主動(dòng)安全功能:
車道線偏離報(bào)警(LDW, Lane Departure Warning)
前方碰撞預(yù)警(FCW, Forward Collision Warning)
行人碰撞預(yù)警(PCW, Pedestrian Collision Warning)
智能大燈控制(IHC, Intelligence Headlamp Control)
限速標(biāo)志識別(TSR/SAS, Traffic Sign Recognition, Speed Assist System)
自動(dòng)緊急剎車(AEB, Autonomous Emergency Braking)
自適應(yīng)巡航(ACC, Adaptive Cruise Control)
技術(shù)優(yōu)勢
世界領(lǐng)先的圖像處理技術(shù)與硬件平臺
前視主動(dòng)安全系統(tǒng)所采用的圖像處理技術(shù)已經(jīng)具有超過100個(gè)車型的應(yīng)用經(jīng)驗(yàn),系統(tǒng)識別率、漏檢率以及誤檢率經(jīng)過超過50萬公里的視頻數(shù)據(jù)庫進(jìn)行驗(yàn)證,性能穩(wěn)定可靠。
系統(tǒng)通過攝像頭系統(tǒng)(Camera Based Only)協(xié)助車輛達(dá)到EuroNCAP五星標(biāo)準(zhǔn),從而降低整車主動(dòng)安全系統(tǒng)成本。
前視主動(dòng)安全平臺
在車型研發(fā)前期,可以提供基于視覺的主動(dòng)安全評估平臺,基于演示車輛(Demo Vehicle)為平臺主動(dòng)安全功能、性能、系統(tǒng)整合評估提供快速控制能力。
編輯:jq
-
芯片
+關(guān)注
關(guān)注
459文章
52181瀏覽量
436170 -
TTL
+關(guān)注
關(guān)注
7文章
531瀏覽量
71455 -
車載攝像頭
+關(guān)注
關(guān)注
5文章
139瀏覽量
28348
原文標(biāo)題:前視主動(dòng)安全攝像頭(Forward Active Safety Camera)
文章出處:【微信號:ADAS,微信公眾號:ADAS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
社區(qū)安裝IPC攝像頭,跟安裝一般安防監(jiān)控攝像頭有什么區(qū)別?

家庭攝像頭:如何正確守護(hù)安全而非制造隱私危機(jī)?

2024年前視攝像頭市場分析



多光譜火焰檢測攝像頭

攝像頭及紅外成像的基本工作原理


堅(jiān)固的后視攝像頭(RVC)申請報(bào)告

用于環(huán)視和CMS攝像頭系統(tǒng)的四通道攝像頭應(yīng)用程序
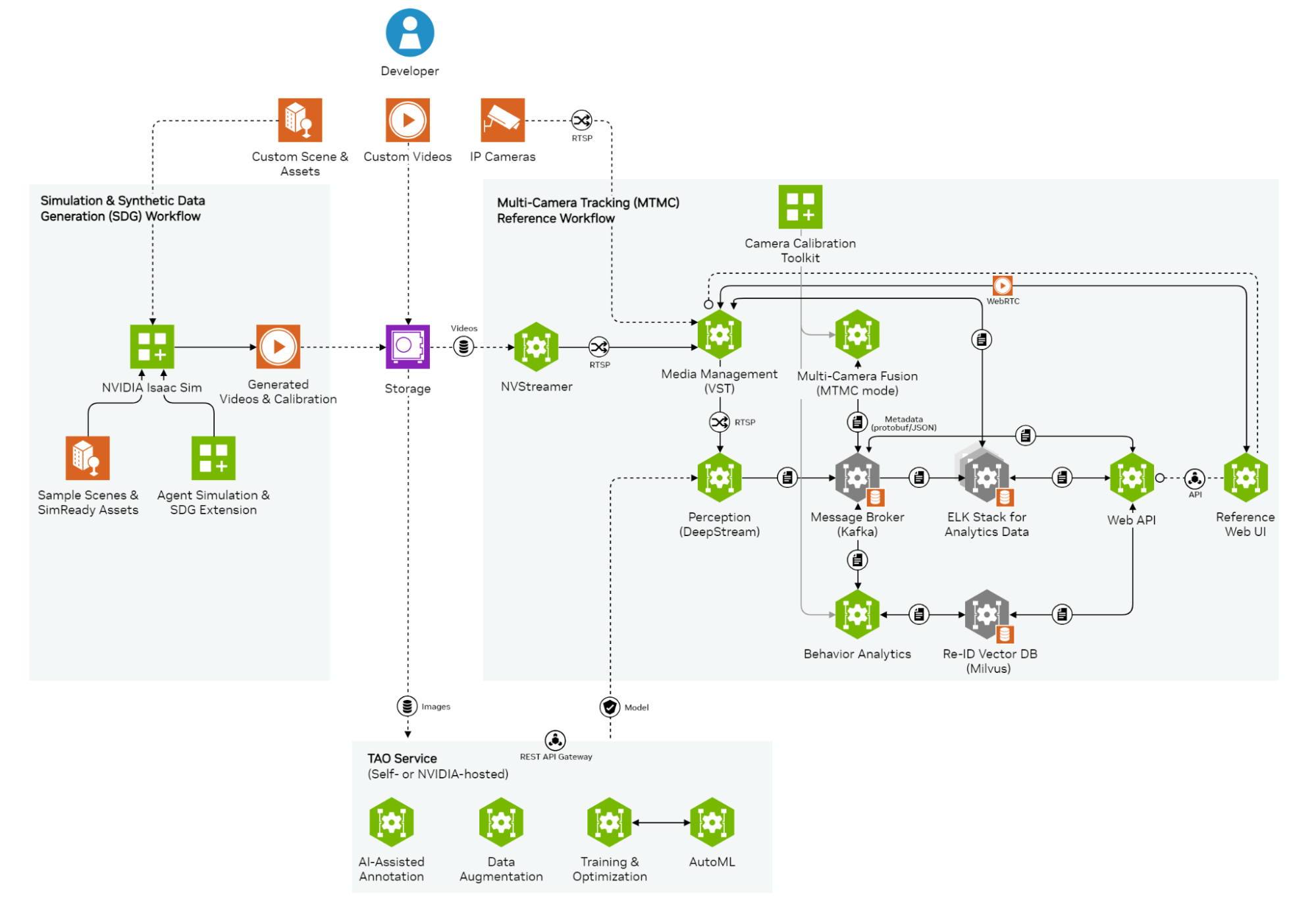
NVIDIA多攝像頭追蹤工作流的應(yīng)用架構(gòu)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論