") 講解L4級(jí)自動(dòng)駕駛系統(tǒng)的技術(shù)趨勢(shì)及難點(diǎn)
講解L4級(jí)自動(dòng)駕駛系統(tǒng)的技術(shù)趨勢(shì)及難點(diǎn)

美國(guó)汽車工程師協(xié)會(huì)(SAE)根據(jù)系統(tǒng)對(duì)于車輛操控任務(wù)的把控程度,將自動(dòng)駕駛技術(shù)分為L(zhǎng)0-L5,系統(tǒng)在L1~L3級(jí)主要起輔助功能;當(dāng)?shù)竭_(dá)L4級(jí),車輛駕駛將全部交給系統(tǒng),而L4、L5的區(qū)別在于特定場(chǎng)景和全場(chǎng)景應(yīng)用。當(dāng)前已有一部分國(guó)內(nèi)主機(jī)廠在規(guī)劃量產(chǎn)了L3級(jí)自動(dòng)駕駛功能,當(dāng)然真正的L3級(jí)要獲得認(rèn)可就必須考慮其是否獲得政府機(jī)關(guān)發(fā)送的準(zhǔn)入牌照。
這里需要說(shuō)明的是L3級(jí)作為一種實(shí)際上的人機(jī)共駕系統(tǒng),在很多設(shè)計(jì)場(chǎng)景中仍然需要依靠駕駛員對(duì)系統(tǒng)的有效接管,而從L4級(jí)自動(dòng)駕駛系統(tǒng)將開始實(shí)現(xiàn)對(duì)駕駛員的完全替代。L4級(jí)自動(dòng)駕駛將是讓汽車自己完全擁有環(huán)境感知、路徑規(guī)劃并且自主實(shí)現(xiàn)車輛控制的技術(shù),也就是用電子技術(shù)控制汽車進(jìn)行仿人駕駛或是自動(dòng)駕駛。
L4級(jí)自動(dòng)駕駛系統(tǒng)在真正的實(shí)際應(yīng)用中,還存在著相當(dāng)多的問(wèn)題項(xiàng),比如后續(xù)將如何具體區(qū)分L3與L4級(jí)自動(dòng)駕駛系統(tǒng),L4級(jí)系統(tǒng)升級(jí)的本質(zhì)在哪里?升級(jí)后的L4自動(dòng)駕駛系統(tǒng)對(duì)高精地圖定位和建圖有何特殊需求?當(dāng)前已有一些園區(qū)內(nèi)車型(如大型物流車、中轉(zhuǎn)小巴等)已實(shí)現(xiàn)了局部L4級(jí)功能,那么他們相對(duì)于乘用車之間的區(qū)別在哪里?后續(xù)L4級(jí)如何實(shí)現(xiàn)城市道路自動(dòng)駕駛?如何真正意義上的確保駕駛安全性?如上這一系列問(wèn)題都是值得我們深刻探究的問(wèn)題。
本文將著重挑選幾個(gè)方面進(jìn)行詳細(xì)講解。
L4級(jí)自動(dòng)駕駛系統(tǒng)升級(jí)本質(zhì)說(shuō)明
如上所述,對(duì)于L4級(jí)以上的自動(dòng)駕駛系統(tǒng)而言,其駕駛?cè)蝿?wù)已經(jīng)得到很明確的區(qū)分,對(duì)于駕駛環(huán)境仍舊定義了設(shè)計(jì)運(yùn)行范圍ODD,要求系統(tǒng)在其ODD內(nèi)部的所有駕駛?cè)蝿?wù)都由系統(tǒng)承擔(dān),且系統(tǒng)需要處理駕駛過(guò)程中可能出現(xiàn)的所有突發(fā)狀況。為此,從L2到L3再到L4級(jí)的系統(tǒng)需求上將從本質(zhì)上發(fā)生變化,具體主要有如下一些不同的駕駛策略升級(jí)。
SAE分級(jí) 駕駛輔助(L1-L2) 有限自動(dòng)駕駛L3 高度自動(dòng)駕駛L4
駕駛環(huán)境ODD 無(wú)嚴(yán)苛的駕駛環(huán)境要求; 高速公路、城市快速路(避開施工區(qū)、匝道、收費(fèi)站、并道、應(yīng)急車道、專用車道、缺口道路、無(wú)交通燈);
有區(qū)分對(duì)向車流的中央隔離帶;
車道線清晰;
單向至少兩車道:車道寬度、半徑、坡度滿足要求; L4駕駛環(huán)境可以是在L3基礎(chǔ)上進(jìn)一步限定更為嚴(yán)苛的駕駛環(huán)境要求(該要求應(yīng)該充分考慮對(duì)于L4級(jí)車輛傳感器的探側(cè)局限與處理器的處理極限);同時(shí)也需要系統(tǒng)自定義相關(guān)的封閉道路環(huán)境。
前者需要更為精準(zhǔn)且實(shí)時(shí)性高的高精地圖,后者需要路端檢測(cè)支持車端;
駕駛員狀態(tài)DMS 要求駕駛員精力集中,不可出現(xiàn)疲勞、注意力分散現(xiàn)象 ODD內(nèi),駕駛員可適當(dāng)脫手脫眼,但駕駛員精力需要保證在接受系統(tǒng)報(bào)警后手腳隨時(shí)接管控制車輛;
ODD外,駕駛員只可以按照L2級(jí)駕駛輔助策略進(jìn)行自動(dòng)駕駛 ODD內(nèi),駕駛員可完全脫手脫眼,駕駛主體完全由系統(tǒng)承擔(dān);
ODD外,重新確認(rèn)是否滿足L3級(jí)自動(dòng)駕駛條件,滿足則降級(jí)為L(zhǎng)3,否則降級(jí)至L2級(jí)輔助駕駛;
高精地圖需求HPP 無(wú)高精地圖需求 高精地圖精確定義ODD 高精地圖精確定義ODD;
車路協(xié)同輔助優(yōu)化;
L4級(jí)自動(dòng)駕駛系統(tǒng)對(duì)高精地圖的特殊需求
為了確保L4級(jí)自動(dòng)駕駛系統(tǒng)功能能夠在實(shí)際應(yīng)中真正得以實(shí)現(xiàn),首先必須搭載高精地圖作為整個(gè)功能需求的核心,這里我們對(duì)整個(gè)L4系統(tǒng)所必需的高精地圖如何應(yīng)用及工作進(jìn)行詳細(xì)的過(guò)程梳理。
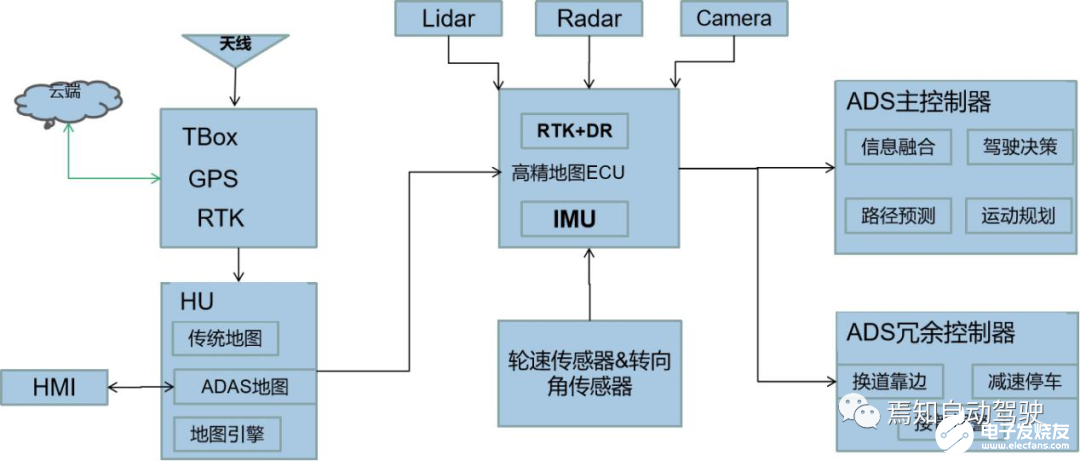
首先我們需要介紹下高精地圖與自動(dòng)駕駛典型架構(gòu)原理。從下圖中可知,高精地圖匯集了包含一般地圖(傳統(tǒng)導(dǎo)航地圖、ADAS地圖、地圖引擎),車身傳感器(輪速傳感器、轉(zhuǎn)向角傳感器),自動(dòng)駕駛傳感器(激光雷達(dá)、毫米波雷達(dá)、攝像頭)的所有輸入信號(hào),并通過(guò)一定的算法進(jìn)行融合,擬合輸出的車道信息應(yīng)該具備最優(yōu)的探測(cè)結(jié)果性能。同時(shí),在探測(cè)過(guò)程中,高精地圖對(duì)車輛環(huán)境認(rèn)知具備最優(yōu)性能。
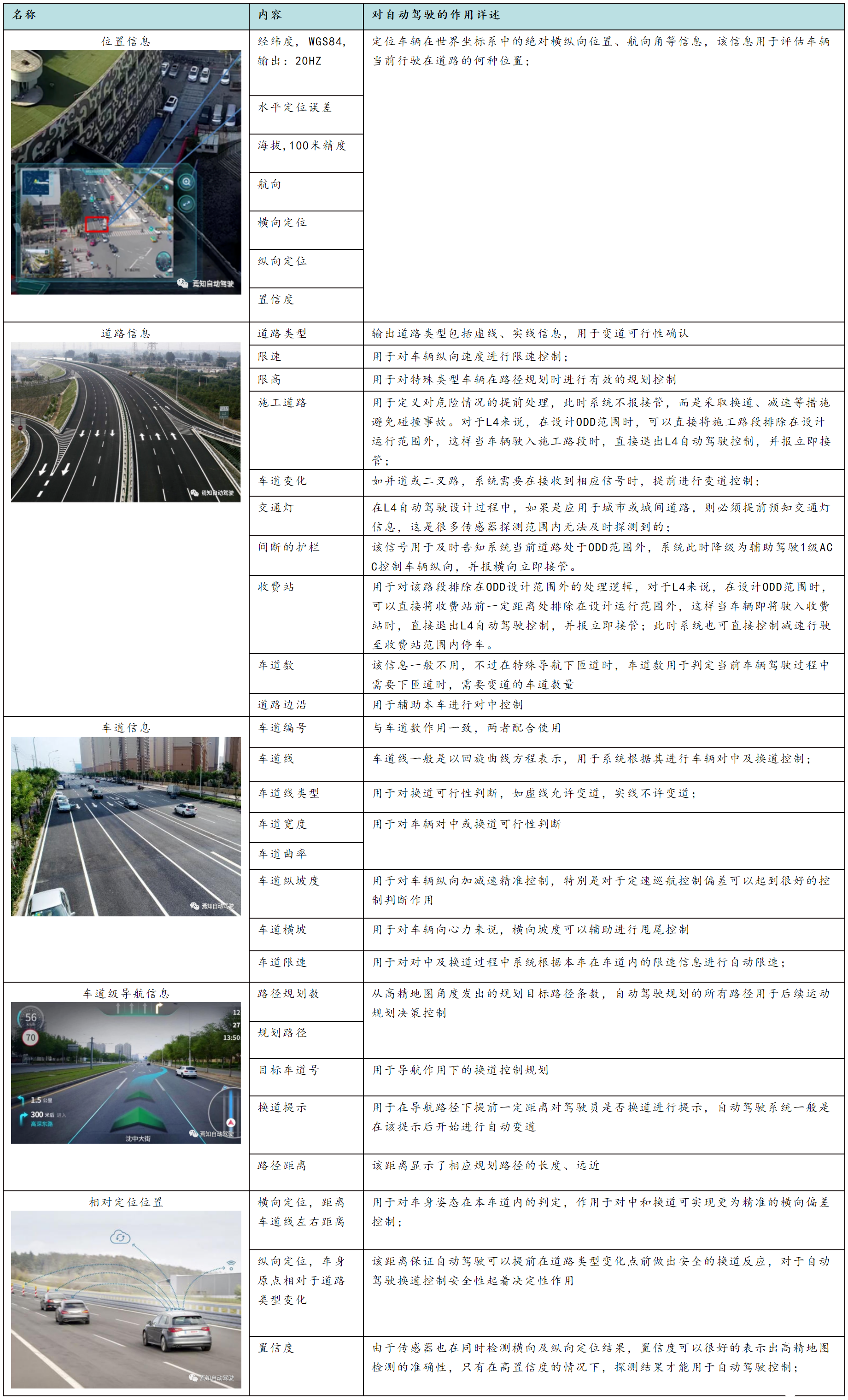
要了解L4級(jí)自動(dòng)駕駛?cè)绾斡脠D,就必須了解自動(dòng)駕駛對(duì)高精度地圖的哪些信息比較關(guān)注。通常情況下,高精地圖能夠?yàn)樽詣?dòng)駕駛提供的設(shè)計(jì)運(yùn)行范圍ODD信息,它是整個(gè)高精地圖的需求核心。在L4級(jí)自動(dòng)駕駛系統(tǒng)中對(duì)于ODD相關(guān)的車輛環(huán)境信息需求將比L3級(jí)自動(dòng)駕駛更為復(fù)雜,其對(duì)系統(tǒng)的影響結(jié)果也將更加顯著,我們?cè)谠O(shè)計(jì)過(guò)程中需要充分考慮到。如下表羅列了針對(duì)L4級(jí)自動(dòng)駕駛系統(tǒng)功能所能產(chǎn)生的一系列定位或建圖需求。
不同車型在地圖發(fā)展策略中的應(yīng)用
未來(lái)的高度自動(dòng)駕駛系統(tǒng)會(huì)在不同的車型之間存在不同的差異,因?yàn)椴煌笮 ㈩愋蛙囆退刂频腖4級(jí)自動(dòng)駕駛系統(tǒng)所承載的自動(dòng)駕駛參數(shù)存在很大的差異,哪怕是同一套自動(dòng)駕駛系統(tǒng)控制模型也會(huì)因?yàn)檐囕v的不同構(gòu)造存在不同的控制結(jié)果。由此可見,未來(lái)L4配套的地圖發(fā)展路線會(huì)偏向按照車型分為不同的領(lǐng)域。總體說(shuō)來(lái),不同的車型將在如下幾個(gè)方面存在不同的差異。
1、道路類型:每種車型都有自己經(jīng)常行駛的道路類型,每種道路類型對(duì)于高精度地圖要求略有不同;
如公交車要求地圖能夠準(zhǔn)確實(shí)時(shí)的提供在城市道路的車輛環(huán)境信息,其更關(guān)注在擁堵和復(fù)雜交通流下的信息探測(cè)(如十字路口);
礦車、貨車一類的大型車主要用于物流運(yùn)輸,則更多的是關(guān)注在高速路或快速路下的道路情況(如前方是否施工等);
2、道路信息:不同車型對(duì)同一種道路類型、限速、限高中出現(xiàn)的不同路段也有不同的需求;
如大貨車由于其自身高度較高,更關(guān)注路上的限高這一因素;
不同車型的限速要求不同,大型汽車限速條件更為嚴(yán)苛,則更加關(guān)注發(fā)出路徑上的限速信息;
另外根據(jù)不同車型(如大貨車有專用車道,小汽車無(wú)專用車道),其對(duì)車道級(jí)限速要求比較嚴(yán)苛,這也是對(duì)交通事故判定打下基礎(chǔ);
3、車道信息:不同車型載重對(duì)于坡度、彎道曲率、等信息要求
針對(duì)某些重型貨車,其車身長(zhǎng)度較長(zhǎng),則更關(guān)注彎道曲率,過(guò)大的彎道曲率可能導(dǎo)致無(wú)法正常過(guò)彎;
針對(duì)不同載重的貨車,其對(duì)道路最大橫坡縱坡容忍度也有差異,過(guò)大的坡度可能導(dǎo)致無(wú)法正常行駛;
4、導(dǎo)航規(guī)劃路徑:導(dǎo)航規(guī)劃路徑需要充分考慮車型,推薦路徑需要綜合考慮如上1、2、3中的因素,避免出現(xiàn)推薦路徑對(duì)某些異型車在行駛過(guò)程中不可用的情況;
此外,針對(duì)不同車型,在地圖建圖的前期對(duì)地圖采集的眾包策略會(huì)有不同的要求,具體表現(xiàn)如下:
高精地圖需針對(duì)不同車輛類型建立不同的場(chǎng)景采集分配比重,以各車型均關(guān)注的道路場(chǎng)景建立“基礎(chǔ)縱包”,以各不同車型單獨(dú)關(guān)注的道路場(chǎng)景增添到基礎(chǔ)眾包中;
各種車型由于其反應(yīng)能力不同,對(duì)高精地圖發(fā)出的相同信息的精度要求也不一樣,在高精地圖建圖性能匹配時(shí),需要充分考慮滿足其精度性能的實(shí)現(xiàn)方案;
各種不同車型由于其反應(yīng)能力不同,對(duì)高精地圖發(fā)出信號(hào)周期也不相同,故需要針對(duì)每一款不同的車型單獨(dú)提出需求來(lái)滿足信號(hào)輸入條件。
總結(jié)
L4級(jí)自動(dòng)駕駛作為一種高度自動(dòng)化的駕駛系統(tǒng),在特定環(huán)境中已經(jīng)完全不需要駕駛員在環(huán)進(jìn)行控制和接管了。但是超越其處理極限的場(chǎng)景中,仍然需要駕駛員接管方向盤,這種特定區(qū)域下定義的處理極限就是我們需要重點(diǎn)研究的問(wèn)題。本文針對(duì)L4級(jí)自動(dòng)駕駛系統(tǒng)所關(guān)注的幾個(gè)較大的技術(shù)問(wèn)題進(jìn)行了分析,同時(shí)也分別進(jìn)行了難點(diǎn)解讀。后續(xù)L4設(shè)計(jì)中是需要真正考慮到這些因素所產(chǎn)生的影響的,設(shè)計(jì)過(guò)程的場(chǎng)景庫(kù)也應(yīng)該具備完整性。
原文鏈接:https://mp.weixin.qq.com/s/JiPKDYmUiAXyA07zGmwBZQ
編輯:jq
-
ODD
+關(guān)注
關(guān)注
0文章
9瀏覽量
7535 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
789文章
14321瀏覽量
170637 -
HPP
+關(guān)注
關(guān)注
0文章
7瀏覽量
5828
發(fā)布評(píng)論請(qǐng)先 登錄
華為數(shù)據(jù)中心自動(dòng)駕駛網(wǎng)絡(luò)通過(guò)EANTC歐洲高級(jí)網(wǎng)絡(luò)測(cè)試中心L4級(jí)自智網(wǎng)絡(luò)測(cè)評(píng)

佑駕創(chuàng)新車規(guī)級(jí)L4自動(dòng)駕駛小巴獲項(xiàng)目定點(diǎn)
廣汽埃安與滴滴推出搭載禾賽AT128激光雷達(dá)的L4自動(dòng)駕駛車型
產(chǎn)業(yè)鏈起飛!L3級(jí)自動(dòng)駕駛年內(nèi)有望落地
佑駕創(chuàng)新成功交付L4級(jí)自動(dòng)駕駛小巴項(xiàng)目
佑駕創(chuàng)新L4級(jí)自動(dòng)駕駛小巴成功交付
伊予鐵巴士公司啟動(dòng)L4級(jí)自動(dòng)駕駛公交商業(yè)運(yùn)營(yíng)
當(dāng)春節(jié)駕車返鄉(xiāng)擁有了L3/L4級(jí)自動(dòng)駕駛
l4級(jí)別自動(dòng)駕駛的特點(diǎn)是什么
經(jīng)緯恒潤(rùn)全冗余R-EPS助力L4級(jí)自動(dòng)駕駛落地

L4算法公司如何助力城市NOA加速落地?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論