") 建模過程中特征點(diǎn)檢測與匹配的知識
建模過程中特征點(diǎn)檢測與匹配的知識
導(dǎo)讀
本文先從圖像特征開始介紹,后分點(diǎn)闡述特征子和描述子的相關(guān)分類及特點(diǎn),最后以圖像展示了特征匹配的關(guān)系,完整的敘述了整個建模過程中特征點(diǎn)檢測與匹配的知識。
一、圖像特征介紹
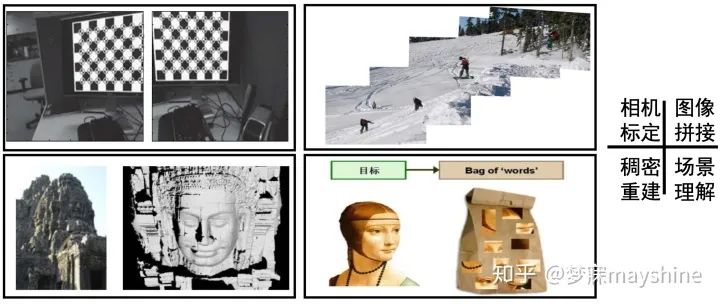
1、圖像特征點(diǎn)的應(yīng)用
相機(jī)標(biāo)定:棋盤格角點(diǎn)陰影格式固定,不同視角檢測到點(diǎn)可以得到匹配結(jié)果,標(biāo)定相機(jī)內(nèi)參
圖像拼接:不同視角匹配恢復(fù)相機(jī)姿態(tài)
稠密重建:間接使用特征點(diǎn)作為種子點(diǎn)擴(kuò)散匹配得到稠密點(diǎn)云
場景理解:詞袋方法,特征點(diǎn)為中心生成關(guān)鍵詞袋(關(guān)鍵特征)進(jìn)行場景識別
2、圖像特征點(diǎn)的檢測方法
人工設(shè)計(jì)檢測算法:sift、surf、orb、fast、hog
基于深度學(xué)習(xí)的方法:人臉關(guān)鍵點(diǎn)檢測、3D match點(diǎn)云匹配
場景中的人工標(biāo)記點(diǎn):影視場景背景簡單的標(biāo)記,特殊二維碼設(shè)計(jì)(快速,精度低)

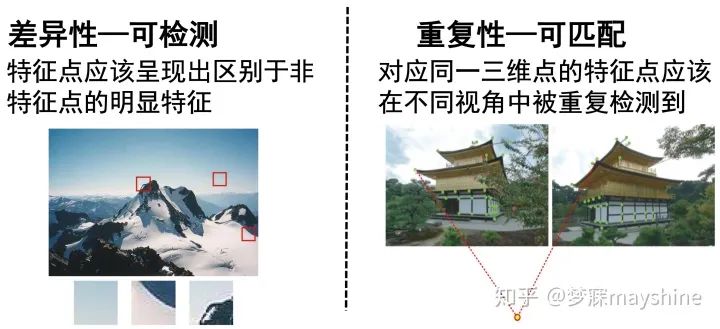
3、圖像特征點(diǎn)的基本要求
差異性:視覺上場景上比較顯著點(diǎn),灰度變化明顯,邊緣點(diǎn)等
重復(fù)性:同一個特征在不同視角中重復(fù)出現(xiàn),旋轉(zhuǎn)、光度、尺度不變性
二、特征檢測子
1、Harris 角點(diǎn)檢測(早期,原理簡單,視頻跟蹤,快速檢測)
夢寐mayshine:角點(diǎn)檢測(2) - harris算子 - 理論與Python代碼
https://zhuanlan.zhihu.com/p/90393907
動機(jī):特征點(diǎn)具有局部差異性
以每個點(diǎn)為中心取一個窗口,例如,5×5/7×7的像素,描述特征點(diǎn)周圍環(huán)境
此點(diǎn)具有差異性->窗口往任意方向移動,則周圍環(huán)境變化較大->具有局部差異性
最小二乘線性系統(tǒng)
加和符號:表示窗口內(nèi)每個像素
w:表示權(quán)重,權(quán)值1或者以點(diǎn)為中心的高斯權(quán)重(離點(diǎn)越近權(quán)重越大)
I:表示像素,RGB/灰度
u,v:窗口移動的方向
H:harris矩陣,由兩個方向上的梯度構(gòu)建而成
圖像梯度:
Harris矩陣:
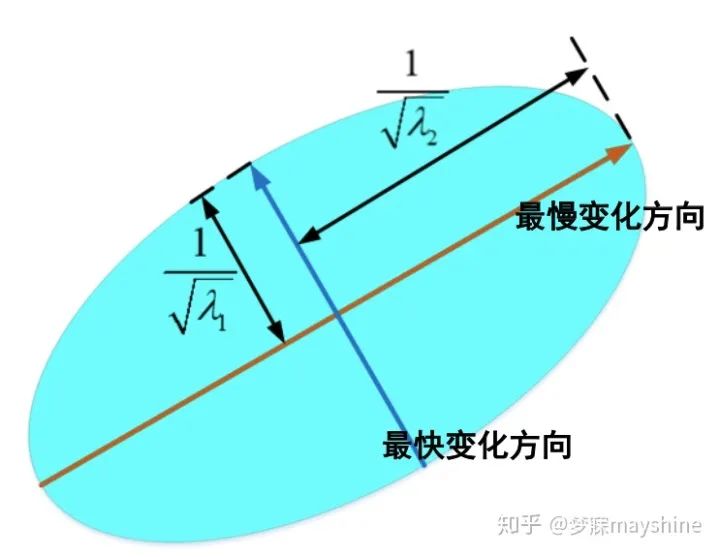
Harris矩陣H 的特征值分析
兩個特征值反映相互垂直方向上的變化情況,分別代表變化最快和最慢的方向,特征值大變化快,特征值小變化慢
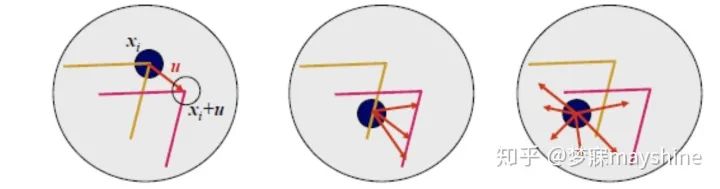
λ1 ≈ λ2 ≈ 0, 兩個方向上變化都很小,興趣點(diǎn)位于光滑區(qū)域
λ1 > 0 , λ2 ≈ 0 ,一個方向變化快,一個方向變化慢,興趣點(diǎn)位于邊緣區(qū)域
λ1 , λ2 > 0 , 兩個方向變化都很快,興趣點(diǎn)位于角點(diǎn)區(qū)域(容易判斷)
Harris角點(diǎn)準(zhǔn)則代替矩陣分解:
反映特征值情況,trace為跡
k的值越小,檢測子越敏感
只有當(dāng)λ1和λ2同時取得最大值時,C才能取得較大值
避免了特征值分解,提高檢測計(jì)算效率
非極大值抑制(Non-maximal Suppression) 選取局部響應(yīng)最大值,避免重復(fù)的檢測
算法流程:
0)濾波、平滑,避免出現(xiàn)階躍函數(shù)
1)計(jì)算圖像水平和垂直方向的梯度
2)計(jì)算每個像素位置的Harris矩陣
3)計(jì)算每個像素位置的Harris角點(diǎn)響應(yīng)值
3+)非極大值抑制
4)找到Harris角點(diǎn)響應(yīng)值大于給定閾值且局部最大的位置作為特征點(diǎn)
檢測結(jié)果:
2、基于LoG的多尺度特征檢測子
動機(jī):Harris角點(diǎn)檢測不具有尺度不變性,讓特征點(diǎn)具有尺度不變性
解決方法:尺度歸一化LoG算子,處理尺度的變化
LoG算子:Lindeberg(1993)提出Laplacian of Gaussian (LoG)函數(shù)的極值點(diǎn)對應(yīng)著特征點(diǎn)
尺度空間:一副圖像使用不同大小濾波核濾波(e.g.高斯濾波),越大的濾波核越模糊,分辨率越小,不同濾波核濾波后的空間為尺度空間=3維空間(圖像+尺度),模擬人類視覺,較遠(yuǎn)物體模糊,一系列濾波核構(gòu)成的不同分辨率圖像為尺度空間->LoG能夠處理不同尺度的圖像
LoG算子[1]形式:高斯濾波性質(zhì):卷積->求拉普拉斯算子==求拉普拉斯算子->卷積 其中是LoG算子
尺度歸一化LoG[2](使得具有可比性=匯率):其中是尺度歸一化LoG算子
不同尺度下的LoG響應(yīng)值不具有可比性
構(gòu)建尺度空間,同時在位置空間和 尺度空間尋找歸一化LoG極值(極大 /極小)點(diǎn)作為特征點(diǎn)
不同尺度下的響應(yīng)值
LoG特征檢測算法流程
1)計(jì)算不同尺度上的尺度歸一化LoG函數(shù)值
2)同時在位置和尺度構(gòu)成的三維空間上尋找 尺度歸一化LoG的極值點(diǎn)
3)進(jìn)行非極大值抑制,減少重復(fù)檢測 (去除冗余、保持穩(wěn)定性)
檢測結(jié)果:效果好,LoG計(jì)算量大
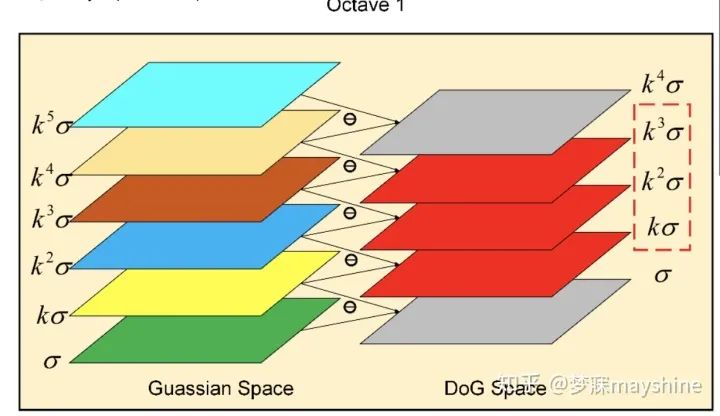
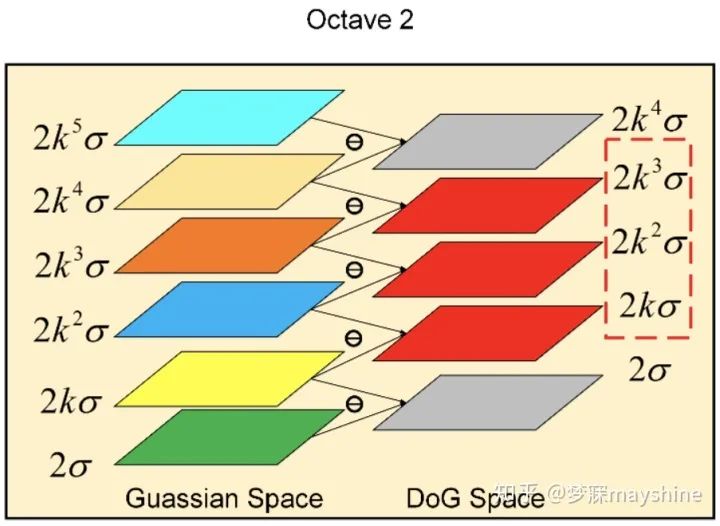
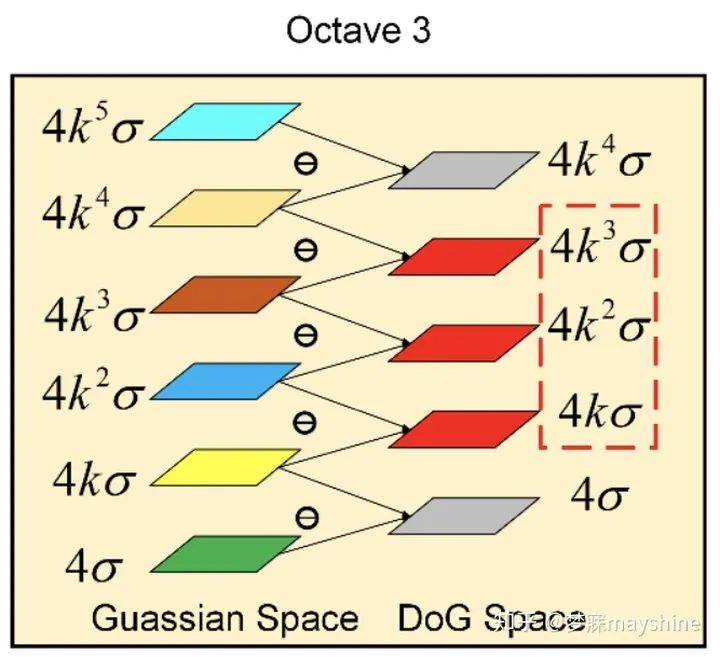
3、基于DoG的多尺度特征檢測子(SIFT)——穩(wěn)定和魯棒
LoG可以由DoG近似:Lowe(2004)提出歸一化LoG近似等價(jià)于相鄰尺度的高斯差分(DoG)
高斯空間:
高斯差分DoG:相鄰的空間做差,極點(diǎn)處對應(yīng)特征點(diǎn)
尺度空間的構(gòu)建
階數(shù):O=3 (octave=階,每階圖像尺寸減少一半,階數(shù)高->運(yùn)算量大->尺度變化大)
每階有效差分?jǐn)?shù):S=3(每個階內(nèi)劃分?jǐn)?shù))
每階層數(shù):N=S+3
高斯空間
高斯差分
有效差分(尺度空間有上下兩個鄰域才行,邊界無效)
任意設(shè)置
特征點(diǎn)位置的確定:
1)尺度空間和圖像空間上:3*3窗口,26個鄰域,找極值點(diǎn)比其他都要大DoG,LoG找極大值或極小值
2)橫軸向代表離散位置,縱軸代表DoG響應(yīng)值,在極值點(diǎn)鄰域內(nèi)求二階函數(shù)的極值=準(zhǔn)確像素位置
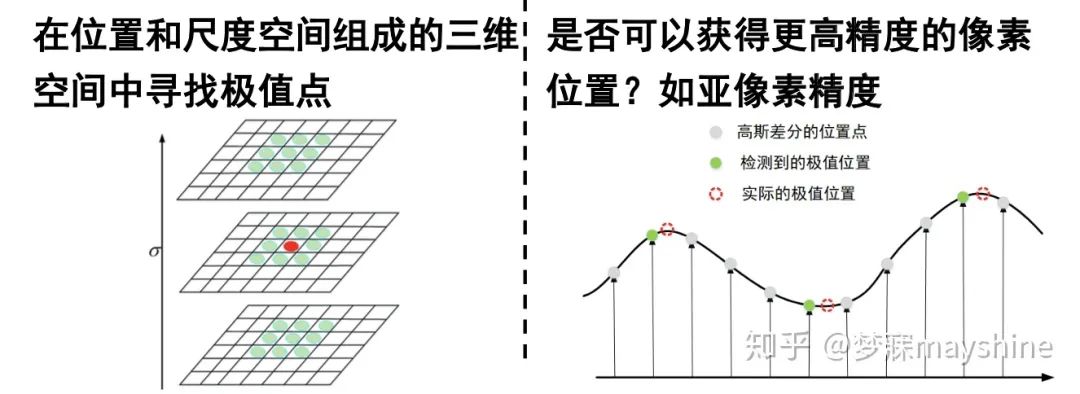
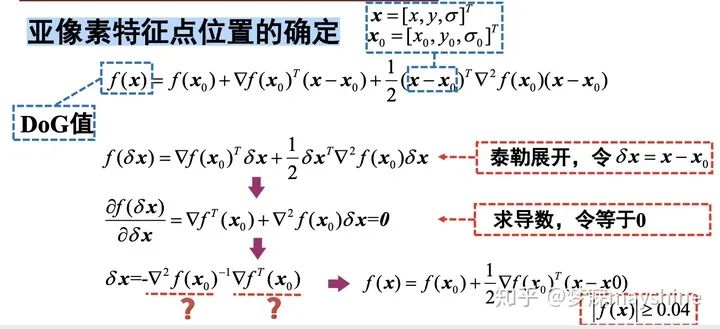
亞像素特征點(diǎn)位置的確定
x:為三維,坐標(biāo)空間+尺度空間
f(x):為DoG值
x0:檢測到離散坐標(biāo)下的極大值點(diǎn)
任務(wù):在x0附近近似一個二階函數(shù),求二階函數(shù)極值得到更準(zhǔn)確的亞像素極值位置
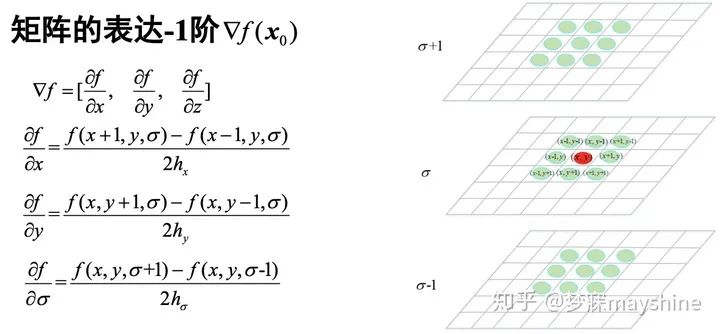
矩陣的表達(dá)-1階
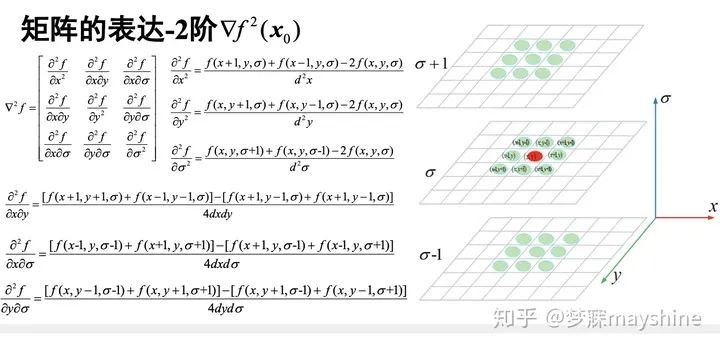
矩陣的表達(dá)-2階
極值點(diǎn)有可能是邊緣點(diǎn),->除去邊緣點(diǎn):DoG在邊緣處值較大,需要避免檢測到邊緣點(diǎn)
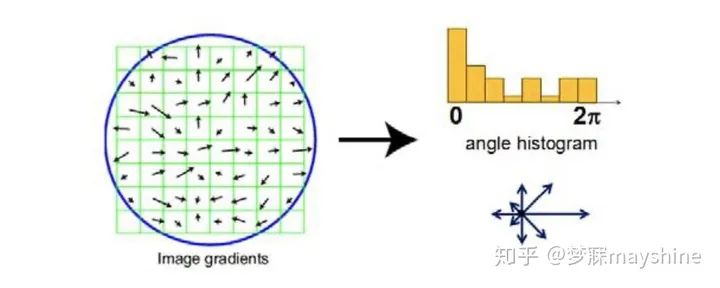
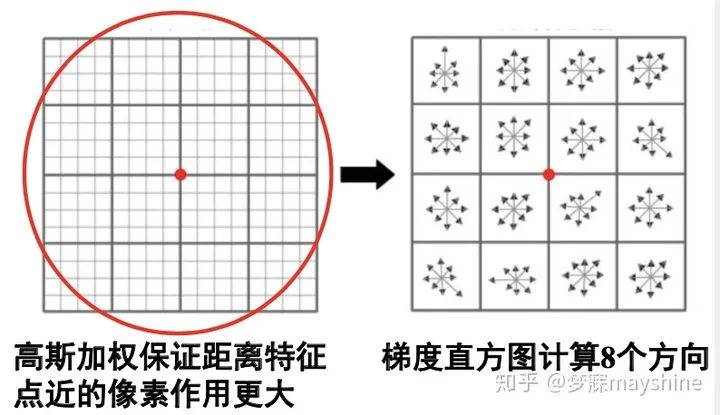
計(jì)算主方向:通過統(tǒng)計(jì)梯度直方圖的方法確定主方向,使算法具有旋轉(zhuǎn)不變性
SIFT特征檢測流程:旋轉(zhuǎn)不變性、尺度不變性、亮度 變化不變性,對視角變化、仿射變換有一定程度的穩(wěn)定性
1)計(jì)算圖像尺度空間:
2)DoG極值點(diǎn)檢測與定位:保留的特征點(diǎn)
3)邊緣點(diǎn)去除:
4)計(jì)算主方向
5)生成描述子
6)檢測結(jié)果
4、快速特征點(diǎn)檢測方法:——實(shí)時性要求高
FAST特征點(diǎn)[3]:Feature from Accelerated Segment Test
1)以候選點(diǎn)p為圓心構(gòu)建一個離散圓
2)比較圓周上的像素與p點(diǎn)像素值
3)當(dāng)有連續(xù)的n個像素值明顯亮于或者暗于p時,p被檢測為特征點(diǎn),例Fast9,Fast12
特性:通過檢測局部像素灰度變化來確認(rèn)特征點(diǎn)的位置,速度快,SIFT的100倍;不具有尺度和旋轉(zhuǎn)不變性
流程:
檢測:
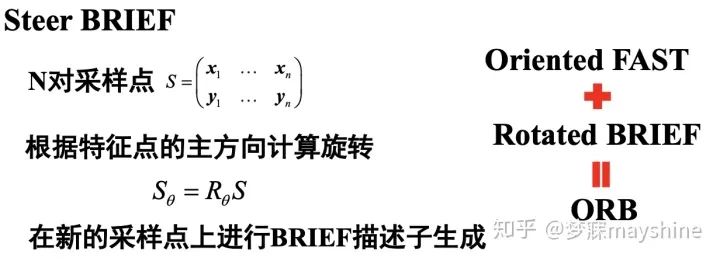
Oriented FAST (ORB)
獲取尺度不變性:構(gòu)建圖像金字塔,在金字塔 每一層上檢測關(guān)鍵點(diǎn)
獲取旋轉(zhuǎn)不變性 :通過灰度質(zhì)心法(Intensity Centroid) 確定圖像主方向
圖像塊B上的矩定義為:
圖像塊B的質(zhì)心定義為 :
計(jì)算方向角 :
檢測結(jié)果:
三、特征描述子
特征描述子 Feature Descriptor
每個特征點(diǎn)獨(dú)特的身份認(rèn)證
同一空間點(diǎn)在不同視角的特征點(diǎn)具有高度相似的描述子
不同特征點(diǎn)的的描述子差異性盡量大
通常描述子是一個具有固定長度的向量
特征支持區(qū)域
主方向:進(jìn)行旋轉(zhuǎn)并重新插值
特征尺度:影響支持區(qū)域的大小
1、基于直方圖的描述子
(1)用于微小運(yùn)動的描述子 [4](e.g.相鄰兩幀視頻)
定義:以特征點(diǎn)為中心的矩形區(qū)域內(nèi)所有像素的灰度值作為描述子
特性:適用于微小變化的圖像對 圖像存在明顯的旋轉(zhuǎn)、尺度、光照和透視變換時不穩(wěn)定
(2)Sift描述子——旋轉(zhuǎn)主方向
定義:根據(jù)主方向?qū)χС謪^(qū)域進(jìn)行旋轉(zhuǎn),并通過雙線性插值重構(gòu)
特性:圖像歸一化處理,去除光照變化
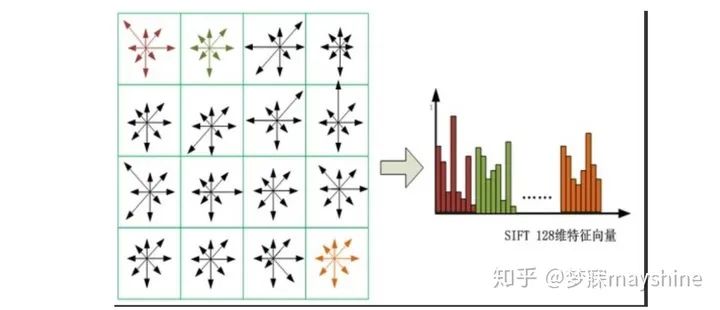
統(tǒng)計(jì)局部梯度信息流程:
1)將區(qū)域劃分成4x4的block ;
2)每個block內(nèi)統(tǒng)計(jì)梯度方向 的直方圖(高斯加權(quán)梯度作為系數(shù))
(2)Sift描述子——生成描述子
(2)Sift描述子——?dú)w一化處理
處理方式
1)門限處理-直方圖每個方向的梯度幅值不超過0.2
2)描述子長度歸一化
特性:歸一化處理提升了特征點(diǎn)光度變化的不變性
SIFT描述子變種:PCA-SIFT/SURF
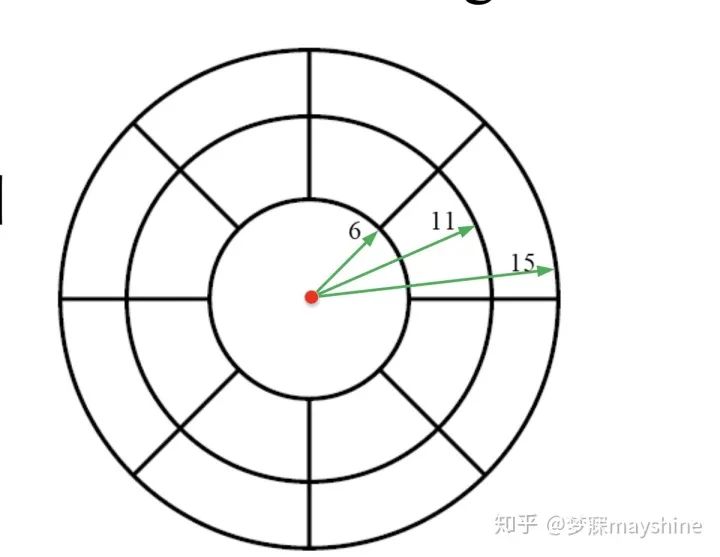
(3)GLOH描述子[5]:Gradient Location-orientation Histogram
一共有1+2x8=17 個blocks
每個blocks計(jì)算16個方向的直方圖
描述子共16x17=272維
通過PCA可以降維到128
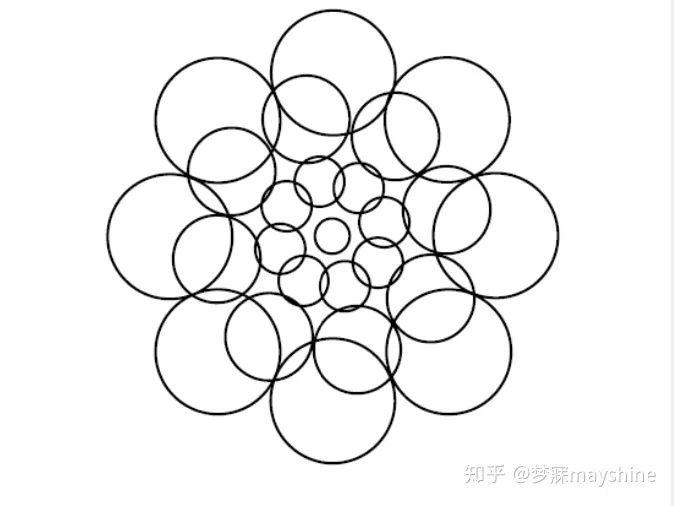
(4)DAISY描述子[6]:每個圓的半徑對應(yīng)高斯的尺度
2、基于不變性的描述子
3、二進(jìn)制描述子——BRIEF
描述子形式:描述向量由N個0或者1組成 N=128,256,512
描述子特性:生成速度快(漢明距離),匹配效率高 ,簡單有效;不具有旋轉(zhuǎn)不變性
描述子流程:
1)圖像進(jìn)行如高斯濾波預(yù)處理——去除噪聲
2)在支持區(qū)域內(nèi)隨機(jī)采樣N對大小5×5的patch
3)比較patch內(nèi)像素和的大小,并保留結(jié)果構(gòu)成特征向量 $ au(p;x,y)=left{ egin{aligned} 1, ifp(x)
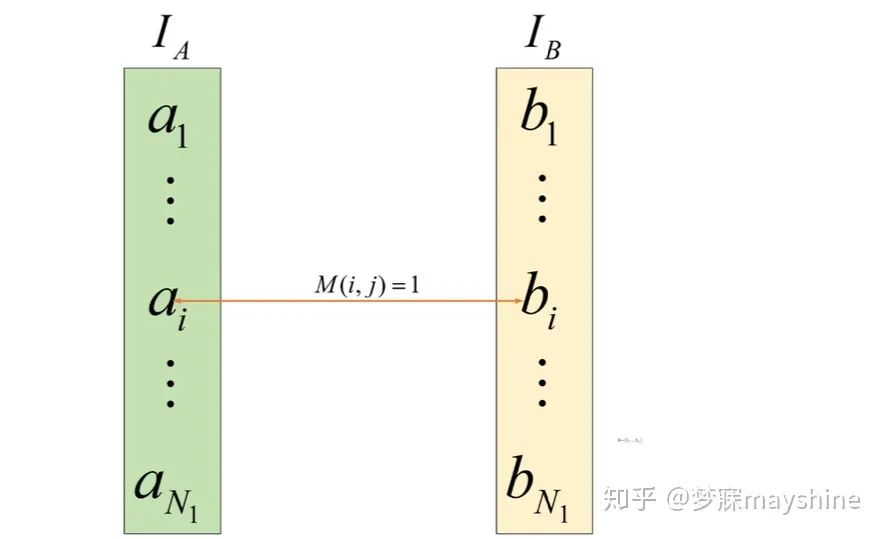
四、特征匹配
計(jì)算兩幅圖像中特征描述子的匹配關(guān)系
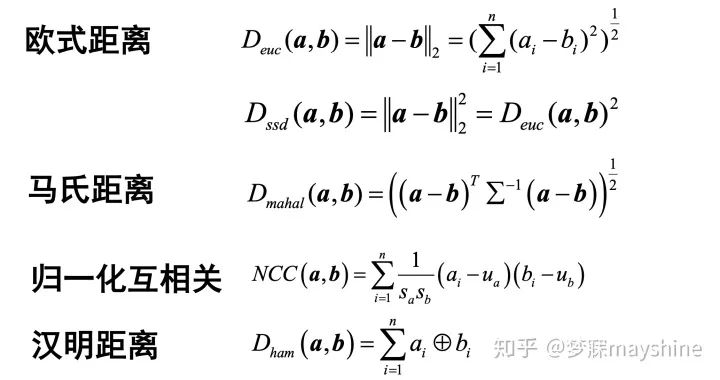
1、距離度量
歸一化互相關(guān),1 ->非常匹配,0->不匹配
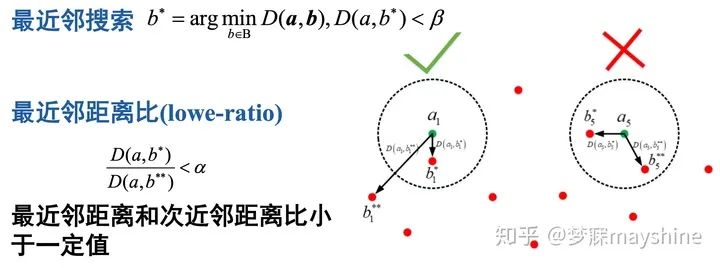
2、匹配策略
最近鄰:加了距離約束,防止孤立點(diǎn)
3、高效匹配
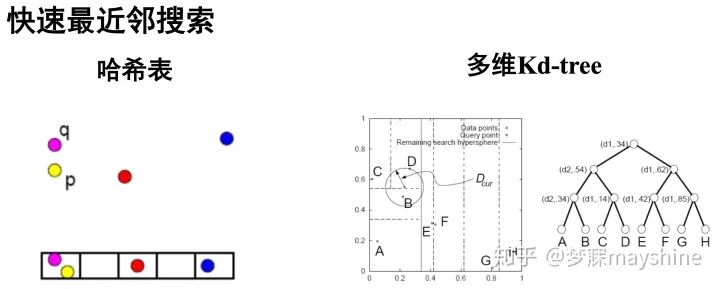
4、特征匹配驗(yàn)證
責(zé)任編輯:lq
-
建模
+關(guān)注
關(guān)注
1文章
315瀏覽量
61427 -
圖像特征
+關(guān)注
關(guān)注
0文章
13瀏覽量
7085 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5554瀏覽量
122475
原文標(biāo)題:綜述:特征點(diǎn)檢測與匹配
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
產(chǎn)品PCBA藍(lán)牙模組加工過程中的靜電防護(hù)知識
半導(dǎo)體制造過程中的三個主要階段
tlc3578在程序編寫的過程中,單片機(jī)檢測外部中斷到來,可是一直檢測不到,為什么?
如何在播放視頻過程中插入音頻

ADS1258調(diào)試過程中,8PIN用示波器測量不到信號,為什么?
芯片制造過程中的兩種刻蝕方法
ADS1284在使用過程中,是否涉及到不同增益的情況下阻抗匹配不一致的問題?
使用語義線索增強(qiáng)局部特征匹配

知識分享 | 輕松實(shí)現(xiàn)優(yōu)質(zhì)建模

opencv圖像識別有什么算法
RIGOL產(chǎn)品在材料應(yīng)力測試過程中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論