") 基于DMC5400多軸運(yùn)動控制器和PC實(shí)現(xiàn)運(yùn)動控制的實(shí)時性設(shè)計
基于DMC5400多軸運(yùn)動控制器和PC實(shí)現(xiàn)運(yùn)動控制的實(shí)時性設(shè)計

作者:吳琳,崔洪亮,信東,劉麗英
引言
眾所周知,激光制導(dǎo)武器是以敏感到的特定激光信號為制導(dǎo)信息。在激光制導(dǎo)武器的半實(shí)物仿真系統(tǒng)中,目標(biāo)仿真和制導(dǎo)仿真具有同等重要的地位。這是因?yàn)榧す饽繕?biāo)模擬的準(zhǔn)確性影響到系統(tǒng)的整體仿真精度和可靠性,甚至可以說目標(biāo)仿真系統(tǒng)的研制水平?jīng)Q定仿真大系統(tǒng)水平。因此,目標(biāo)仿真是提高半實(shí)物仿真系統(tǒng)整體精度的關(guān)鍵,“如何逼真地模擬激光目標(biāo)”就成為仿真中重要的問題。
目標(biāo)仿真系統(tǒng)研究的是能夠?qū)崟r精確的模擬戰(zhàn)場環(huán)境中導(dǎo)引頭入瞳處接收到的各種目標(biāo)反射編碼激光的光學(xué)特性。具體來說就是在計算機(jī)和電機(jī)控制器的控制下實(shí)時控制激光能量和光斑大小的變化,并以此來模擬激光航彈導(dǎo)引頭入瞳處的激光目標(biāo)特性、能量變化特性和光斑大小變化特性。這種精確的模擬要求對目標(biāo)的位置信息和速度信息等進(jìn)行實(shí)時采集處理。之前基于步進(jìn)電機(jī)伺服驅(qū)動系統(tǒng)的程控一體化激光器不能很好的滿足系統(tǒng)的實(shí)時性要求,因此,筆者設(shè)計了基于伺服電機(jī)及運(yùn)動控制卡的運(yùn)動控制系統(tǒng)。該系統(tǒng)在控制激光光斑大小和能量的實(shí)時變化方面較前一系統(tǒng)有了較大改進(jìn)。
運(yùn)動控制的實(shí)時性設(shè)計
對激光光斑的大小和能量的實(shí)時性控制,具體體現(xiàn)就是對程控一體化激光器中的可變衰減系統(tǒng)和可控擴(kuò)束系統(tǒng)進(jìn)行實(shí)時性設(shè)計,這是目標(biāo)仿真系統(tǒng)設(shè)計的一個關(guān)鍵。在設(shè)計時,我們以某型激光制導(dǎo)武器為背景進(jìn)行了數(shù)字仿真,得到一組典型的數(shù)字仿真能量衰減(對應(yīng)的為電機(jī)控制步數(shù)數(shù)據(jù))曲線如圖1~2所示。
由上述數(shù)據(jù)和圖形可見,在初始投彈和飛行的大部分時間里,能量和光斑變化較緩慢,而在接近目標(biāo)時發(fā)生了劇烈的變化。這說明當(dāng)炸彈接近目標(biāo)時激光能量和導(dǎo)引頭所見光斑大小隨時間的變化并不是一個線性關(guān)系。鑒于此,本系統(tǒng)在設(shè)計時既充分考慮光斑大小和能量的實(shí)時跟蹤范圍,又考慮了工程上實(shí)現(xiàn)的可能性,選用了TSA50標(biāo)準(zhǔn)型高速電控平移臺。旋轉(zhuǎn)臺則選用中空力矩電機(jī)帶動旋轉(zhuǎn)棱鏡來直接實(shí)現(xiàn)。特別的,本系統(tǒng)將步進(jìn)電機(jī)驅(qū)動的平移臺和旋轉(zhuǎn)臺均改為由伺服電機(jī)進(jìn)行驅(qū)動,主要考慮的是伺服電機(jī)啟動時間短,速度高,在極短的時間內(nèi)能夠帶動激光器內(nèi)安裝的平移棱鏡和旋轉(zhuǎn)棱鏡做高速運(yùn)動,來模擬導(dǎo)引頭近距離敏感到的光斑的大小和能量,從而能夠滿足對光斑實(shí)時變化的要求。由高速平移臺和旋轉(zhuǎn)電機(jī)分別驅(qū)動擴(kuò)束系統(tǒng)的目鏡和格蘭—付克棱鏡的檢偏鏡,使得能量和光斑變化在彈目距離》300m時能完全滿足實(shí)時性控制要求。而在剩余時間內(nèi),由電機(jī)做全速運(yùn)動來近似逼近末段的陡峭變化。
基于以上的目標(biāo)和對于運(yùn)動控制功能的設(shè)計,采用專用運(yùn)動控制芯片是一種較好的選擇。專用控制芯片通過PCI 總線與PC 機(jī)的CPU 通訊,接收PC 機(jī)的控制指令,由內(nèi)部的邏輯電路進(jìn)行運(yùn)算和脈沖發(fā)送,同時檢測一些開關(guān)量信號(如限位信號)的狀態(tài)并向PC 機(jī)報告,以實(shí)現(xiàn)運(yùn)動控制的功能。在這種方案中,所有的運(yùn)動控制細(xì)節(jié)都由運(yùn)動控制卡上的專用芯片完成,無需占用PC 機(jī)的資源,PC 機(jī)可以專注于用戶界面的處理和對運(yùn)動控制卡狀態(tài)的監(jiān)控。運(yùn)動控制專用芯片自身具有強(qiáng)大的運(yùn)動控制功能,不需要擴(kuò)展復(fù)雜的外圍電路。PC 機(jī)只需要對運(yùn)動控制芯片發(fā)送命令和參數(shù),控制簡單。經(jīng)過反復(fù)的調(diào)研和論證,初步確定總體運(yùn)動控制方案為“PCI 接口芯片+專用運(yùn)動控制芯片+激光控制模塊”。
運(yùn)動控制系統(tǒng)結(jié)構(gòu)
整個控制系統(tǒng)硬件由PC機(jī)、DMC5400多軸控制器、增量式編碼器以及松下公司的全數(shù)字式交流伺服系統(tǒng)(包括電機(jī)和驅(qū)動器)、中空力矩電機(jī)等組成(見圖3)。
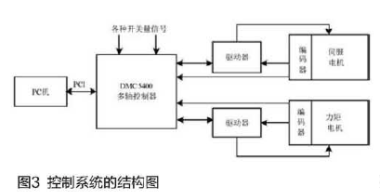
該控制系統(tǒng)以PC機(jī)平臺為基礎(chǔ),DMC5400多軸運(yùn)動控制器為運(yùn)動控制核心。PC機(jī)的CPU與DMC5400的 CPU構(gòu)成上下位機(jī)的結(jié)構(gòu),兩個CPU各自完成相應(yīng)的任務(wù)。
PC機(jī)作為DMC5400的上位機(jī),提供Windows平臺及人機(jī)操作界面,完成系統(tǒng)初始化、軌跡參數(shù)的設(shè)定、運(yùn)動信息的實(shí)時顯示等,僅需用極少部分時間向控制卡發(fā)送運(yùn)動指令。下位DMC5400多軸運(yùn)動控制器主要完成平移電機(jī)和旋轉(zhuǎn)電機(jī)的運(yùn)動控制,包括伺服驅(qū)動、程序解釋以及高速數(shù)據(jù)采集等實(shí)時性任務(wù)。DMC5400直接插在PC機(jī)的PCI插槽中,并由動態(tài)鏈接庫驅(qū)動。
運(yùn)動控制系統(tǒng)軟件設(shè)計
該控制系統(tǒng)實(shí)質(zhì)上是一種以DMC5400為核心組成的開放式數(shù)控系統(tǒng)。上位PC機(jī)和下位DMC5400多軸控制器各有自己的CPU、存儲器和外設(shè),分別構(gòu)成一套獨(dú)立的計算機(jī)系統(tǒng)。因此,在選擇控制軟件的開發(fā)平臺時充分考慮了這種結(jié)構(gòu)的特點(diǎn)。由于DMC5400多軸控制器采用了實(shí)時操作系統(tǒng),數(shù)控程序代碼解釋工作和連續(xù)運(yùn)動時復(fù)雜的插補(bǔ)運(yùn)算都由其內(nèi)部的DSP來完成,可以保證對運(yùn)算過程和各種緊急情況的及時處理。相對而言,上位PC機(jī)只是提供與用戶交互部分和一些狀態(tài)變量的讀取工作,CPU的工作量不是很大。
上位機(jī)軟件
上位機(jī)軟件的組成如圖4所示。
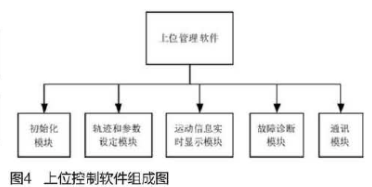
初始化模塊:實(shí)現(xiàn)零位標(biāo)定等功能。
軌跡和參數(shù)設(shè)定模塊:根據(jù)不同的運(yùn)動功能和軌跡,提供了相應(yīng)的參數(shù)設(shè)定界面,其中包括參數(shù)合理性判別、缺省值提供等輔助功能。
運(yùn)動信息實(shí)時顯示模塊:通過與DMC5400實(shí)時通訊,動態(tài)采集負(fù)載位置和速度等運(yùn)動信息。然后,借助CB開發(fā)的帶有二維坐標(biāo)系的顯示界面,實(shí)現(xiàn)實(shí)時動態(tài)顯示負(fù)載運(yùn)動軌跡,同時動態(tài)顯示左右兩個軟硬限位狀態(tài)。另外,在界面的右下角還實(shí)時動態(tài)顯示負(fù)載的位置和速度數(shù)據(jù)。
故障診斷模塊:內(nèi)嵌于各功能模塊中,如設(shè)定值合理性判別、鍵盤操作功能保護(hù)、界面功能按鈕的連鎖、電機(jī)限速保護(hù)、位置超速保護(hù)等。
通訊模塊:利用DMC5400提供的動態(tài)鏈接庫編制,實(shí)現(xiàn)上位PC機(jī)和下位DMC5400之間的通訊。它內(nèi)嵌于各功能模塊中,囊括了同DMC5400通訊的所有方式,而且將其主要的函數(shù)進(jìn)行分類、封裝。所編制的通訊程序?qū)崿F(xiàn)了運(yùn)動軌跡程序及設(shè)定參數(shù)的下載、上位PC機(jī)對DMC5400的指令傳輸及DMC5400對 PC機(jī)的狀態(tài)反饋等通訊功能。
下位機(jī)軟件
控制下位機(jī)是運(yùn)動控制系統(tǒng)的直接控制級,構(gòu)成可控擴(kuò)束和可控衰減兩個獨(dú)立的伺服控制回路。其功能包括:實(shí)現(xiàn)目標(biāo)運(yùn)動的實(shí)時控制;采用相應(yīng)的控制算法,對系統(tǒng)的運(yùn)行位置、速度進(jìn)行控制;將檢測到的系統(tǒng)狀態(tài)信號通過PCI總線傳給上位機(jī)。DMC5400的運(yùn)動控制功能十分豐富,可以滿足絕大多數(shù)多軸運(yùn)動控制系統(tǒng)的要求。
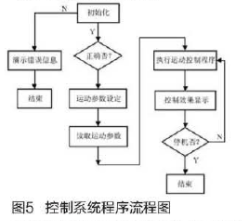
DMC5400運(yùn)動控制卡提供基于Windows 95 /98/Me/NT/2000/XP下32位DLL驅(qū)動編程。其具體的編程語言可為VB、VC、C++Builder中的任何一種。在運(yùn)動函數(shù)庫中所使用到的函數(shù)主要有如下幾種:控制卡及軸設(shè)置函數(shù),獨(dú)立運(yùn)動和插補(bǔ)運(yùn)動函數(shù),制動函數(shù),位置和狀態(tài)的設(shè)置及查詢函數(shù),I/O口操作函數(shù),錯誤代碼函數(shù)。其函數(shù)返回值為0(函數(shù)執(zhí)行正確)或-1(函數(shù)執(zhí)行錯誤)。其控制系統(tǒng)的流程圖如圖5所示。
仿真結(jié)果分析
圖6~11為半實(shí)物仿真試驗(yàn)與數(shù)學(xué)仿真試驗(yàn)激光制導(dǎo)炸彈空間三維坐標(biāo)變化曲線,可見兩種仿真模式下試驗(yàn)曲線吻合良好。由于在整個彈道曲線中差別表現(xiàn)不明顯,因此給出了各坐標(biāo)相應(yīng)的彈道末端局部顯示曲線。
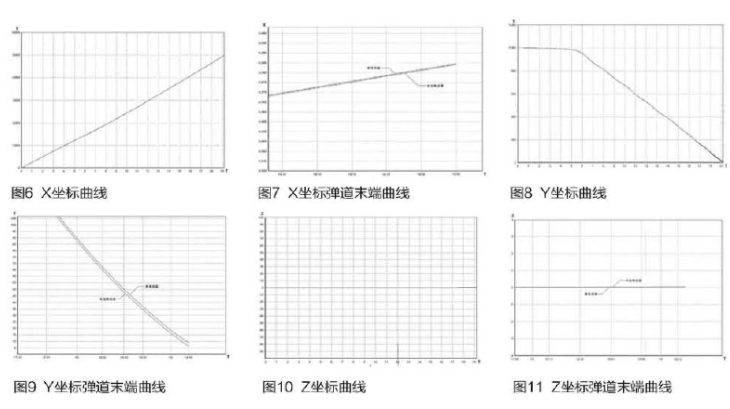
試驗(yàn)結(jié)果表明,數(shù)學(xué)仿真的仿真解算穩(wěn)定,結(jié)果精度良好;同時,在相同投彈條件下,半實(shí)物仿真與數(shù)學(xué)仿真試驗(yàn)過程相關(guān)性比較好,仿真精度非常高,由此反映出目標(biāo)仿真系統(tǒng)帶入全系統(tǒng)的誤差極小(目標(biāo)系統(tǒng)誤差占全系統(tǒng)誤差的90%),所設(shè)計的控制系統(tǒng)實(shí)現(xiàn)了光斑大小和能量的實(shí)時控制。
責(zé)任編輯:gt
-
控制器
+關(guān)注
關(guān)注
114文章
17098瀏覽量
184183 -
激光器
+關(guān)注
關(guān)注
17文章
2733瀏覽量
62662 -
計算機(jī)
+關(guān)注
關(guān)注
19文章
7660瀏覽量
90745
發(fā)布評論請先 登錄
通過實(shí)時網(wǎng)絡(luò)實(shí)現(xiàn)多軸運(yùn)動控制的同步
運(yùn)動控制器是如何進(jìn)行設(shè)計的?
如何利用DSP與FPGA設(shè)計運(yùn)動控制器?
實(shí)時網(wǎng)絡(luò)怎么提高多軸運(yùn)動控制性能?
如何通過實(shí)時網(wǎng)絡(luò)實(shí)現(xiàn)多軸運(yùn)動同步控制?
運(yùn)動控制器如何選擇
運(yùn)動控制器的類型有哪些
DMC-41X3運(yùn)動控制器規(guī)格
DMC 52000 EtherCAT總線型運(yùn)動控制器
三軸運(yùn)動控制器示教系統(tǒng)
DMC660MF六軸運(yùn)動控制器的示教系統(tǒng)的簡易說明






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論