") 相位噪聲是與哪種類(lèi)型的抖動(dòng)相對(duì)應(yīng),彼此之間又有著怎樣的數(shù)學(xué)關(guān)系
相位噪聲是與哪種類(lèi)型的抖動(dòng)相對(duì)應(yīng),彼此之間又有著怎樣的數(shù)學(xué)關(guān)系
每當(dāng)介紹相位噪聲測(cè)試方案時(shí),都會(huì)提到時(shí)間抖動(dòng),經(jīng)常提到二者都是表征信號(hào)短期頻率穩(wěn)定度的參數(shù),而且是頻域和時(shí)域相對(duì)應(yīng)的參數(shù)。正如題目所示,相位噪聲與時(shí)間抖動(dòng)有著一定的關(guān)系,那么相噪是與哪種類(lèi)型的抖動(dòng)相對(duì)應(yīng),彼此之間又有著怎樣的數(shù)學(xué)關(guān)系,這些疑問(wèn)都將在文中找到答案。
1.相位噪聲與時(shí)間抖動(dòng)概述
相位噪聲通常是針對(duì)CW信號(hào)而言的,是表征信號(hào)頻譜純度的非常重要的參數(shù),衡量了信號(hào)頻率的短期穩(wěn)定度。相位噪聲是頻域的參數(shù),在時(shí)域還有一個(gè)與之對(duì)應(yīng)的參數(shù)——隨機(jī)抖動(dòng),二者之間存在一定的數(shù)學(xué)關(guān)系,可以相互轉(zhuǎn)換。
在前面關(guān)于相位噪聲測(cè)試的文章中,給出了IEEE早期關(guān)于相噪的定義,同樣的,關(guān)于時(shí)間抖動(dòng),SONET規(guī)范也給出了相應(yīng)的定義:
“Jitter is defined as the short-term variations of a digital signal’s significant instants from their ideal positions in time”.
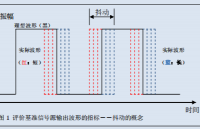
抖動(dòng)定義中給出了三個(gè)要素:
(1) significant instants,通常是指信號(hào)的上升沿或者下降沿;
(2) ideal positions in time,這是指信號(hào)上升沿或下降沿在時(shí)間維度上的理想位置;
(3) short-term variations,信號(hào)實(shí)際上升沿或下降沿相對(duì)于理想位置時(shí)間偏移的短期波動(dòng)。
雖然定義中只提到了數(shù)字信號(hào),但實(shí)際上具有普遍適用性,當(dāng)然對(duì)于CW信號(hào)也是適用的。
上述定義所給出的是一種綜合性抖動(dòng),按照不同的原因機(jī)制,又可以分解為多種不同的抖動(dòng)分量,包括:隨機(jī)抖動(dòng),周期性抖動(dòng),數(shù)據(jù)相關(guān)抖動(dòng),占空比失真等。
CW信號(hào)可以理解為一種特殊的數(shù)字碼流信號(hào),理論上只有隨機(jī)抖動(dòng)和周期性抖動(dòng)這兩種分量。隨機(jī)抖動(dòng)是由寬帶噪聲引起的,周期性抖動(dòng)是由串?dāng)_引起的,從產(chǎn)生機(jī)制上講,都相當(dāng)于對(duì)信號(hào)進(jìn)行了調(diào)頻或者調(diào)相。
高端的頻譜儀及專(zhuān)業(yè)的相噪測(cè)試設(shè)備,除了能夠給出相位噪聲,還可以測(cè)試載波附近的spur。根據(jù)產(chǎn)生的機(jī)制可以判定,相位噪聲是與隨機(jī)抖動(dòng)相對(duì)應(yīng)的,spur是與周期性抖動(dòng)相對(duì)應(yīng)的。
下文主要聚焦在相噪與隨機(jī)抖動(dòng)的關(guān)系,后面所提到的抖動(dòng),除非特別說(shuō)明,否則一律視為隨機(jī)抖動(dòng)。
2.相位噪聲與時(shí)間抖動(dòng)有何關(guān)系?
理想的CW信號(hào)用公式可以表示為

相位噪聲可以理解為寬帶隨機(jī)噪聲對(duì)CW信號(hào)的相位調(diào)制,因此,CW信號(hào)的頻譜具有對(duì)稱的左右兩個(gè)邊帶。
從相位調(diào)制的角度看,經(jīng)寬帶隨機(jī)噪聲u(t) 調(diào)制后,已調(diào)信號(hào)可以表示為

式中,kPM為調(diào)相比例系數(shù),u(t) 為寬帶隨機(jī)信號(hào),通常可以視為白噪聲信號(hào),相當(dāng)于由無(wú)數(shù)個(gè)點(diǎn)頻信號(hào)疊加而成。

對(duì)于u(t) 中包含的任意頻點(diǎn)?m,對(duì)應(yīng)的調(diào)制信號(hào)表達(dá)式為

下面以頻率為?m的信號(hào)作為調(diào)制信號(hào),從數(shù)學(xué)的角度推導(dǎo)單邊帶相位噪聲與時(shí)間抖動(dòng)的關(guān)系。
對(duì)射頻載波調(diào)相后,已調(diào)信號(hào)的表達(dá)式為

由調(diào)制信號(hào)引起的載波信號(hào)的瞬時(shí)相位定義為

通常稱θp為調(diào)相因子,表征了載波信號(hào)相位波動(dòng)的最大偏移,單位為弧度rad.,其表達(dá)式為

因此,已調(diào)信號(hào)又可以寫(xiě)為

將上式展開(kāi)為

因?qū)拵г肼暦确浅P。瑢?duì)載波信號(hào)進(jìn)行相位調(diào)制造成的相位偏移也是非常小的,通常θp<<1,則存在如下近似關(guān)系:

上式可進(jìn)一步寫(xiě)為

理論上,如果使用單頻點(diǎn)信號(hào)作為調(diào)制信號(hào)對(duì)射頻載波進(jìn)行相位調(diào)制,已調(diào)信號(hào)可以展開(kāi)為第一類(lèi)貝塞爾函數(shù),從展開(kāi)式可以看出,頻譜分量非常豐富,而且關(guān)于載波頻率左右對(duì)稱。而上面的公式表明,卻只有載波、左右邊帶三個(gè)頻率分量,這正是因?yàn)樯厦孀隽艘恍?shù)學(xué)近似。
以右邊帶為例,其信號(hào)功率為

載波信號(hào)功率為

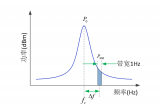
則在頻偏fm=?m/2π 處的單邊帶相位噪聲為

式中,θrms為載波信號(hào)相位波動(dòng)的有效值。該公式具有普遍適用性,適用于任意頻偏。
相位噪聲表征了某一頻偏處的單邊帶相對(duì)噪聲功率譜密度,由上式可知,θ2rms表征了雙邊帶相對(duì)噪聲功率譜密度。
上面是以寬帶隨機(jī)噪聲中的任意單頻點(diǎn)信號(hào)作為調(diào)制信號(hào)為例,簡(jiǎn)要描述了相位噪聲的形成,而寬帶噪聲包含無(wú)數(shù)個(gè)單頻點(diǎn)信號(hào),對(duì)載波進(jìn)行相位調(diào)制后,那么從頻譜上看,同樣可以得到左右對(duì)稱的兩個(gè)邊帶,而且左右邊帶的頻譜是連續(xù)的。
隨機(jī)抖動(dòng)與相位噪聲有什么關(guān)系呢?
時(shí)間抖動(dòng)就是指載波信號(hào)上升沿或者下降沿在時(shí)間軸上的短期波動(dòng),隨機(jī)抖動(dòng)是由于寬帶噪聲引起的邊沿?zé)o規(guī)則隨機(jī)波動(dòng),這與相位噪聲是一一對(duì)應(yīng)的,邊沿的波動(dòng)是各個(gè)頻偏處相噪的綜合體現(xiàn)。載波邊沿的隨機(jī)波動(dòng),存在一個(gè)波動(dòng)范圍,從概率密度上講,基本服從高斯分布,通常采用標(biāo)準(zhǔn)差表征隨機(jī)抖動(dòng),這也是隨機(jī)抖動(dòng)的有效值,也是通常要測(cè)試的參數(shù)。
時(shí)間抖動(dòng)引起了相位的波動(dòng),只要確定了相位波動(dòng)的量,那么也就確定了時(shí)間抖動(dòng)。
將各個(gè)頻偏處的相位噪聲求和并進(jìn)一步變換可得

由于相位噪聲的邊帶是連續(xù)的,因此,上式可以用積分表示

當(dāng)然,測(cè)試設(shè)備是沒(méi)有辦法進(jìn)行積分的,只能對(duì)離散的測(cè)試數(shù)據(jù)進(jìn)行求和來(lái)模擬積分的效果。
θrms,total即為由總體的相位噪聲引起的相位波動(dòng),結(jié)合載波頻率并運(yùn)用如下公式便可以計(jì)算出對(duì)應(yīng)的時(shí)間抖動(dòng)

值得一提的是,上述公式中的相位噪聲不是對(duì)數(shù)值,而是線性值!而且,根據(jù)相位噪聲計(jì)算得到的抖動(dòng)為隨機(jī)抖動(dòng),換言之,隨機(jī)抖動(dòng)與相位噪聲是一一對(duì)應(yīng)的。
3.如何測(cè)試時(shí)間抖動(dòng)?
從目前看,關(guān)注時(shí)間抖動(dòng)的信號(hào)主要分為兩類(lèi):快沿信號(hào)和CW信號(hào)。前者通常是指在高速串行總線通信中的比特流信號(hào)及其時(shí)鐘信號(hào),這類(lèi)信號(hào)普遍具有非常快的邊沿,頻譜分量較為豐富。后者主要是指諸如射頻載波、晶振信號(hào)等單頻點(diǎn)信號(hào),這類(lèi)信號(hào)頻譜相對(duì)單一。
使用示波器是測(cè)試時(shí)間抖動(dòng)最直接的方法,可以直接測(cè)試抖動(dòng),而不需要由相位噪聲推導(dǎo)而來(lái),對(duì)于上述兩類(lèi)信號(hào)都是適用的。尤其是對(duì)于快沿信號(hào),不僅要測(cè)試各種抖動(dòng)分量,還要測(cè)試幅度、邊沿時(shí)間以及眼圖等信號(hào)特征參數(shù),必須要使用示波器進(jìn)行測(cè)試。
對(duì)于CW信號(hào),基本上只關(guān)注隨機(jī)抖動(dòng),如果給出了抖動(dòng)的指標(biāo)要求,一定會(huì)給出對(duì)應(yīng)的是哪個(gè)頻偏范圍。中高端示波器可以直接測(cè)試隨機(jī)抖動(dòng),而且支持設(shè)定積分頻偏范圍,觀測(cè)該頻偏范圍內(nèi)的總隨機(jī)抖動(dòng)。但缺點(diǎn)是,示波器自身的抖動(dòng)噪底往往較大,如果CW信號(hào)自身的隨機(jī)抖動(dòng)與示波器抖動(dòng)噪底相當(dāng),那么就無(wú)法直接準(zhǔn)確測(cè)試了。
如前所述,由相位噪聲可以推導(dǎo)出隨機(jī)抖動(dòng),那么就可以先測(cè)試相位噪聲,然后再根據(jù)公式計(jì)算出隨機(jī)抖動(dòng)。通過(guò)配置自動(dòng)相噪測(cè)試選件,中高端頻譜儀測(cè)試相噪和抖動(dòng)更加方便。而且單純從隨機(jī)抖動(dòng)的測(cè)試能力而言,頻譜儀自身的抖動(dòng)噪底也好很多,如果超出了頻譜儀的測(cè)試能力,還可以選擇測(cè)試相噪的“專(zhuān)家級(jí)”設(shè)備——信號(hào)源分析儀,相噪測(cè)試能力更強(qiáng)。優(yōu)點(diǎn)很明顯,但缺點(diǎn)也很明顯,這些頻域設(shè)備只能測(cè)試頻域相關(guān)參數(shù),卻無(wú)法進(jìn)行時(shí)域相關(guān)測(cè)試!
無(wú)論是使用示波器直接測(cè)試隨機(jī)抖動(dòng),還是使用頻譜儀等設(shè)備先測(cè)試相噪、再計(jì)算隨機(jī)抖動(dòng),整個(gè)測(cè)試都是非常簡(jiǎn)單、智能的。那么,應(yīng)該如何選擇呢?關(guān)鍵還是取決于儀表自身的測(cè)試能力和功能是否滿足需求!
本期原創(chuàng)工程師:海川
責(zé)任編輯:xj
原文標(biāo)題:如何理解相位噪聲與時(shí)間抖動(dòng)的關(guān)系?
文章出處:【微信公眾號(hào):微波射頻網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
微波
+關(guān)注
關(guān)注
16文章
1071瀏覽量
84432 -
相位噪聲
+關(guān)注
關(guān)注
2文章
185瀏覽量
23202 -
時(shí)間抖動(dòng)
+關(guān)注
關(guān)注
0文章
5瀏覽量
6544 -
頻射
+關(guān)注
關(guān)注
0文章
3瀏覽量
5818
原文標(biāo)題:如何理解相位噪聲與時(shí)間抖動(dòng)的關(guān)系?
文章出處:【微信號(hào):mwrfnet,微信公眾號(hào):微波射頻網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
普源DSG3000系列如何實(shí)現(xiàn)低相位噪聲
ISO7241是屬于哪種類(lèi)型的隔離器件?是否是磁隔離?
請(qǐng)問(wèn)如何根據(jù)相位噪聲求取相位噪聲的功率譜密度?
是德E5080B矢量網(wǎng)絡(luò)分析儀的相位噪聲分析

電源軌噪聲對(duì)系統(tǒng)時(shí)鐘抖動(dòng)的影響

鎖相環(huán)PLL的噪聲分析與優(yōu)化 鎖相環(huán)PLL與相位噪聲的關(guān)系
I2S數(shù)據(jù)和電壓之間的對(duì)應(yīng)關(guān)系是什么?
相位噪聲、抖動(dòng)和艾倫偏差 –?比較和區(qū)別
數(shù)字鎖相環(huán)固有的相位抖動(dòng)是怎樣產(chǎn)生的,如何解決
如何在兩種類(lèi)型的SOT663封裝之間進(jìn)行協(xié)同布局

請(qǐng)問(wèn)pA極和nA極的電流放大應(yīng)該使用哪種類(lèi)型的放大器?
時(shí)鐘抖動(dòng)與相位噪聲的關(guān)系
CAN中繼器的類(lèi)型有哪些
相位噪聲對(duì)收發(fā)信機(jī)的影響





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論