") 開(kāi)發(fā)人工智能/機(jī)器學(xué)習(xí)(AI/ML)算法幫助無(wú)人機(jī)進(jìn)行自動(dòng)補(bǔ)給
開(kāi)發(fā)人工智能/機(jī)器學(xué)習(xí)(AI/ML)算法幫助無(wú)人機(jī)進(jìn)行自動(dòng)補(bǔ)給
隨著美軍對(duì)空中無(wú)人機(jī)進(jìn)行監(jiān)視和偵察的依賴增加,一個(gè)有趣的戰(zhàn)術(shù)問(wèn)題出現(xiàn)了:無(wú)人機(jī)的電池不可避免地耗盡,限制了它們的用途,甚至更糟的是,它們無(wú)法完成任務(wù)。一種正在尋求的解決方案是使用陸基自動(dòng)駕駛汽車,可以將其派出給戰(zhàn)場(chǎng)空中無(wú)人機(jī)的耗盡電池充電。美國(guó)陸軍正在資助正在進(jìn)行的研究,這將使小型無(wú)人飛機(jī)系統(tǒng)(sUAS)小組下降到無(wú)人地面車輛(UGV)進(jìn)行自動(dòng)補(bǔ)給,以便他們繼續(xù)執(zhí)行任務(wù)。
美國(guó)陸軍作戰(zhàn)能力發(fā)展司令部(CCDC)陸軍研究實(shí)驗(yàn)室(ARL)正在與伊利諾伊州芝加哥大學(xué)進(jìn)行為期四年,價(jià)值800萬(wàn)美元的合作協(xié)議,以開(kāi)發(fā)關(guān)鍵的推進(jìn)力和動(dòng)力技術(shù),為未來(lái)的UAAS提供動(dòng)力。
贊助|如何避免HPC數(shù)據(jù)流量阻塞
工作的一部分包括開(kāi)發(fā)人工智能/機(jī)器學(xué)習(xí)(AI / ML)算法,以使sUAS能夠找到最佳路線規(guī)劃,以自動(dòng)返回到UGV進(jìn)行充電。軍事上采用AI / ML的原因是需要對(duì)通向UGV的無(wú)人機(jī)路線進(jìn)行自主控制,這包括擴(kuò)大作戰(zhàn)范圍和任務(wù)時(shí)間。
項(xiàng)目經(jīng)理Mike Kweon博士說(shuō),目前的挑戰(zhàn)是,采用當(dāng)前電池技術(shù)的sUAS大約有26分鐘的時(shí)間執(zhí)行飛行任務(wù)并在斷電之前返回家中,這將需要士兵攜帶數(shù)千枚電池進(jìn)行任務(wù)ARL的多功能戰(zhàn)術(shù)動(dòng)力和推進(jìn)基本研究計(jì)劃。
Kweon說(shuō):“如果不解決如何滿足能源需求,使用人工智能和機(jī)器學(xué)習(xí)的所有其他先進(jìn)技術(shù)將對(duì)陸軍毫無(wú)用處。”“在戰(zhàn)場(chǎng)上,我們沒(méi)有奢侈地更換數(shù)百個(gè)無(wú)人機(jī)的電池并將其充電數(shù)小時(shí)。”
小型無(wú)人機(jī)
研究人員目前正在研究充電選項(xiàng),并開(kāi)發(fā)了幾種AI / ML算法,以使諸如四旋翼飛行器之類的小型無(wú)人機(jī)能夠找到最佳路線以及監(jiān)視和改善電源管理。
工作原理:小型無(wú)人機(jī)將使用電池電量傳感器來(lái)響應(yīng)電池電量的狀態(tài)來(lái)打開(kāi)三個(gè)LED燈(綠色,黃色和紅色)之一。綠燈將指示無(wú)人機(jī)的電池處于最佳電量范圍內(nèi)。當(dāng)電源降至最佳水平以下時(shí),黃燈將亮起,紅燈將指示無(wú)人機(jī)將在幾秒鐘或幾分鐘內(nèi)沒(méi)有電。
當(dāng)電池傳感器降到最佳水平以下時(shí),無(wú)人機(jī)將自動(dòng)下降并懸停在UGV的充電端口上以進(jìn)行無(wú)線充電。
研究人員正在使用諸如光譜診斷和數(shù)據(jù)科學(xué)之類的先進(jìn)技術(shù)來(lái)開(kāi)發(fā)用于UAS的傳感器和控制系統(tǒng)。(資料來(lái)源:美國(guó)陸軍CCDC陸軍研究實(shí)驗(yàn)室)
Kweon說(shuō),可以同時(shí)從同一個(gè)UGV無(wú)線充電的無(wú)人機(jī)數(shù)量取決于平臺(tái)外無(wú)線功率傳輸技術(shù)的功能。
他解釋說(shuō):“平臺(tái)外的無(wú)線充電意味著sUAS可以從UGV充電。”“距離也是設(shè)計(jì)參數(shù)。”
Kweon指出,研究人員正在對(duì)許多UAS進(jìn)行運(yùn)營(yíng)影響分析,以便在不同任務(wù)情況下進(jìn)行充電。
他們還考慮了各種充電選項(xiàng)。Kweon說(shuō):“在短期內(nèi),我們將使用經(jīng)過(guò)改進(jìn)的鋰離子電池,以便快速充電六分鐘。”
這些無(wú)人機(jī)將攜帶用于情報(bào),監(jiān)視和偵察(ISR)的攝像頭(這是美國(guó)陸軍中小型無(wú)人機(jī)的常見(jiàn)任務(wù)),并用于救援任務(wù)。所有圖像都可以發(fā)送到命令控件,以進(jìn)行態(tài)勢(shì)感知和決策。
對(duì)于UGV,它們是小型的多功能運(yùn)輸工具(SMET),“將具有由發(fā)動(dòng)機(jī)或混合動(dòng)力系統(tǒng)提供動(dòng)力的推進(jìn)系統(tǒng)”以及充電板,Kweon解釋說(shuō)。他指出,有關(guān)UGV的更多細(xì)節(jié)無(wú)法討論。
AI / ML算法
研究人員團(tuán)隊(duì)正在研究幾種AI / ML算法。伊利諾伊州芝加哥大學(xué)正在開(kāi)發(fā)的算法將主要側(cè)重于找到通往UGV的最佳(最短)充電路徑。該算法使用無(wú)監(jiān)督學(xué)習(xí)來(lái)收集路線數(shù)據(jù)并在無(wú)人監(jiān)督的情況下從中學(xué)習(xí)。
CCDC陸軍研究實(shí)驗(yàn)室正在與伊利諾伊州芝加哥大學(xué)合作,開(kāi)發(fā)小型無(wú)人機(jī)的算法,這將導(dǎo)致軟件幫助sUAS自主地從軍事任務(wù)返回?zé)o人地面車輛進(jìn)行充電。(來(lái)源:伊利諾伊大學(xué)芝加哥分校)
Kweon的計(jì)劃還負(fù)責(zé)能源和電力管理,包括自動(dòng)充電。路由算法的類似功能將應(yīng)用于能量/功率管理算法。
“ [能源/電源管理]算法將具有多個(gè)子模型,” Kweon說(shuō)。“算法的目的是監(jiān)視能量水平;結(jié)合任務(wù)概況,環(huán)境和其他因素,預(yù)測(cè)任務(wù)所需的能量/功率,并與無(wú)人飛行器進(jìn)行通信,以找到最佳時(shí)機(jī)和返回路線進(jìn)行充電。”
他補(bǔ)充說(shuō),準(zhǔn)確度對(duì)于有效執(zhí)行任務(wù)以及不損失資產(chǎn)都很重要。
Kweon說(shuō):“這些算法將被編程并集成到廣泛的自治堆棧中,以進(jìn)行自治操作。”
ARL還正在開(kāi)發(fā)支持AI的算法,以在無(wú)人機(jī)被鳥(niǎo)和其他飛行物體擊中時(shí)自動(dòng)操縱無(wú)人機(jī)。無(wú)人機(jī)在空中時(shí)必須能夠快速返回原始路徑或采取替代路線。
此外,陸軍實(shí)驗(yàn)室研究的“機(jī)動(dòng)與機(jī)動(dòng)性人工智能基礎(chǔ)研究計(jì)劃(AIMM ERP)”的主要目標(biāo)之一是開(kāi)發(fā)用于UGV的自動(dòng)越野行駛算法。
當(dāng)無(wú)人機(jī)需要充電以繼續(xù)執(zhí)行任務(wù)時(shí),無(wú)人機(jī)需要找到一條通往UGV的優(yōu)化路徑。在有爭(zhēng)議的地區(qū),路徑可能很復(fù)雜。” Kweon說(shuō)。“無(wú)人機(jī)還需要找到最佳路徑,同時(shí)將回程期間的能源消耗降至最低。”
大型無(wú)人機(jī)
對(duì)于大型無(wú)人機(jī)(包括“未來(lái)戰(zhàn)術(shù)無(wú)人飛機(jī)系統(tǒng)”,RQ-7“影子”無(wú)人機(jī)和MQ-1C“灰鷹”(中空長(zhǎng)壽命無(wú)人機(jī)),與小型無(wú)人機(jī)相比,其推進(jìn)和動(dòng)力要求不同,陸軍-獲資助的研究將集中在多燃料混合動(dòng)力推進(jìn)系統(tǒng)中的燃料傳感器的小型化上。
“實(shí)現(xiàn)多種燃料運(yùn)行的關(guān)鍵領(lǐng)域包括點(diǎn)火,燃料輸送和空氣管理,這是任何發(fā)動(dòng)機(jī)設(shè)計(jì)中的典型要素,” Kweon說(shuō)。“主要區(qū)別在于要求與商業(yè)和地面應(yīng)用完全不同。對(duì)于新的設(shè)計(jì),材料,傳感和控制方法,必須了解基本物理原理。同時(shí),這些技術(shù)需要通過(guò)與行業(yè)合作來(lái)加速技術(shù)開(kāi)發(fā)。”
無(wú)人機(jī)將使用多燃料傳感器,“以檢測(cè)輸送到發(fā)動(dòng)機(jī)的燃料的性質(zhì),從而使發(fā)動(dòng)機(jī)可以更可靠地利用任何類型的燃料運(yùn)行,” Kweon說(shuō)。“與商業(yè)部門不同,陸軍需要使用噴氣燃料(其主要著火特性從汽油到柴油的特性)以及國(guó)外的任何本地可用燃料。”
Kweon指出,非常重要的一點(diǎn)是,大型UAS可以使用任何類型的燃料運(yùn)行,同時(shí)降低組件故障的風(fēng)險(xiǎn)。“我們要確保我們的UAS在任何類型的燃料上都能可靠運(yùn)行,并且主要部件不會(huì)出現(xiàn)故障,以便我們能夠繼續(xù)執(zhí)行任務(wù)(提高準(zhǔn)備狀態(tài))并減少部件故障(提高可持續(xù)性)。”
他補(bǔ)充說(shuō),長(zhǎng)期目標(biāo)是擁有一個(gè)“可以實(shí)時(shí)檢測(cè)關(guān)鍵燃料特性而與燃料類型無(wú)關(guān)的傳感器”。
編輯:hfy
-
傳感器
+關(guān)注
關(guān)注
2564文章
52668瀏覽量
764271 -
人工智能
+關(guān)注
關(guān)注
1804文章
48788瀏覽量
246949 -
無(wú)人機(jī)
+關(guān)注
關(guān)注
230文章
10757瀏覽量
185724 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8493瀏覽量
134170
發(fā)布評(píng)論請(qǐng)先 登錄
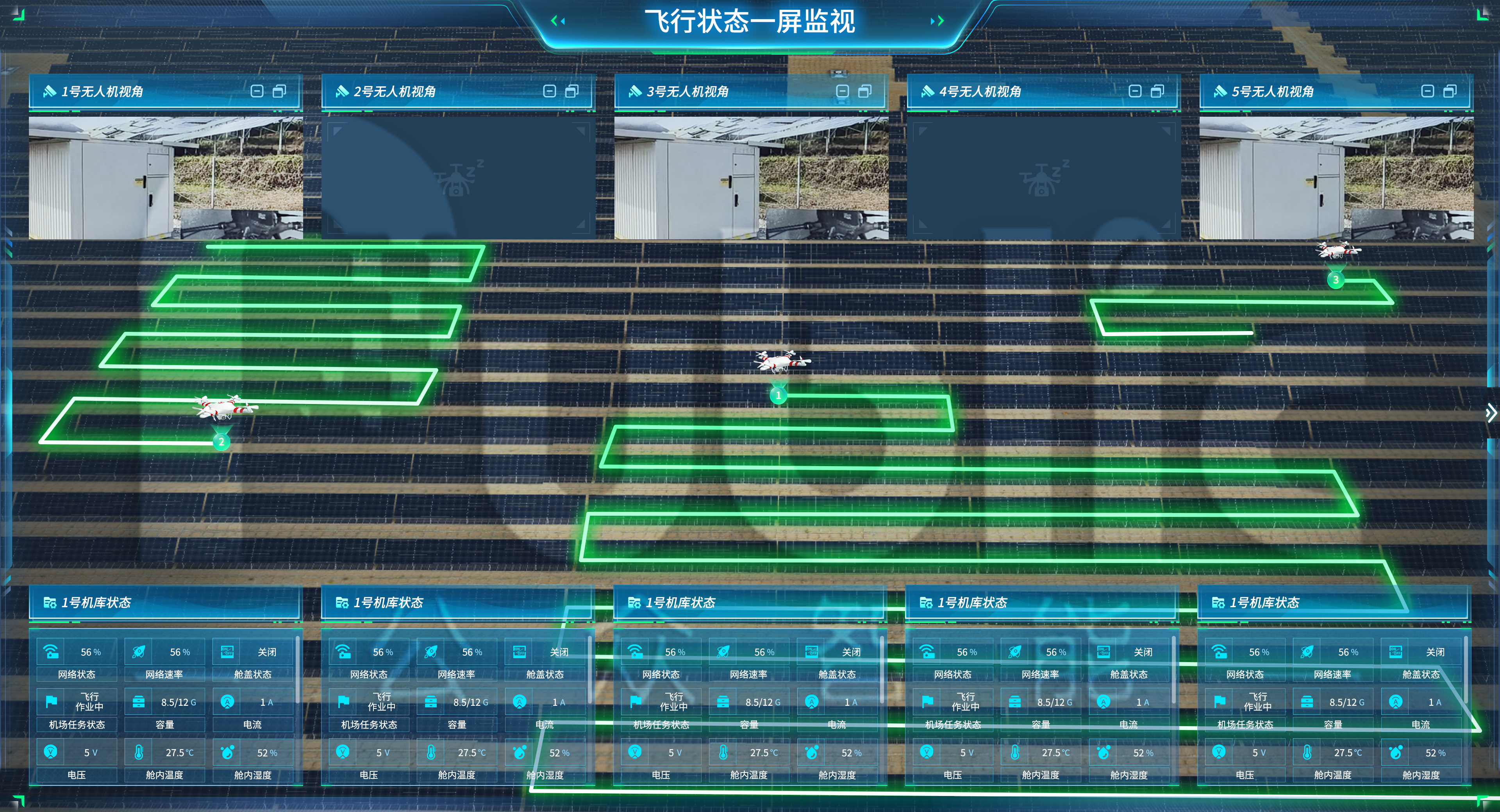
光伏場(chǎng)站無(wú)人機(jī)巡檢系統(tǒng)的應(yīng)用實(shí)踐
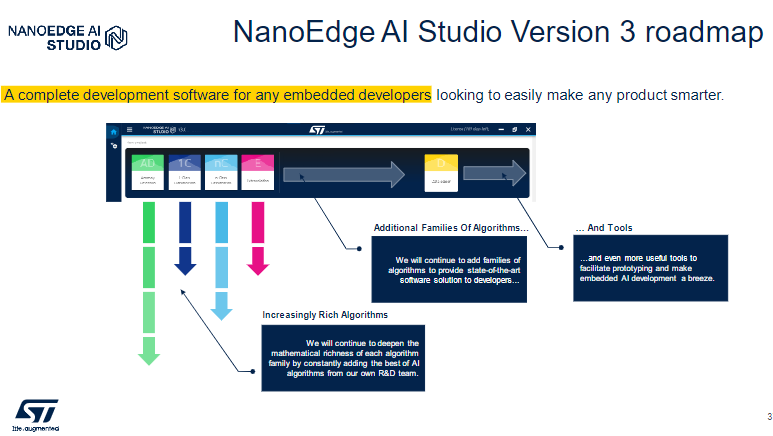
NanoEdge AI Studio 面向STM32開(kāi)發(fā)人員機(jī)器學(xué)習(xí)(ML)技術(shù)
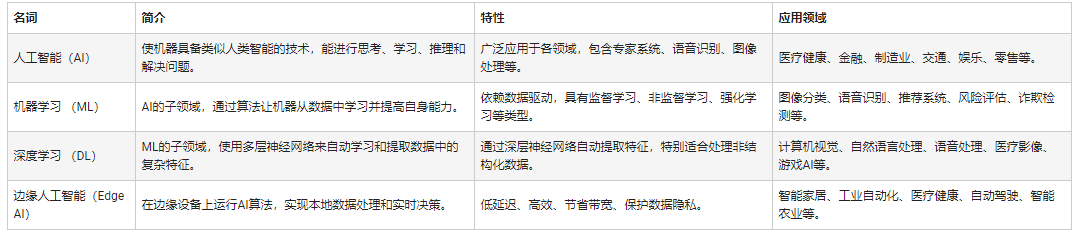
人工智能和機(jī)器學(xué)習(xí)以及Edge AI的概念與應(yīng)用
AI無(wú)人機(jī)機(jī)遇與挑戰(zhàn)并存
新品發(fā)布 | 小體積,大算力——HZHY-AI528S助力無(wú)人機(jī)多場(chǎng)景智能升級(jí)

人工智能、機(jī)器學(xué)習(xí)和深度學(xué)習(xí)存在什么區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論