") 一種算法允許自動地面車輛通過觀察人類駕駛來改善其現(xiàn)有的導航系統(tǒng)
一種算法允許自動地面車輛通過觀察人類駕駛來改善其現(xiàn)有的導航系統(tǒng)

在美國陸軍作戰(zhàn)能力發(fā)展司令部的陸軍研究實驗室和得克薩斯大學奧斯汀分校,研究人員設計了一種算法,該算法允許自動地面車輛通過觀察人類駕駛來改善其現(xiàn)有的導航系統(tǒng)。該團隊在陸軍的一種實驗性自動地面車輛上測試了其方法,即通過演示進行自適應規(guī)劃器參數(shù)學習,即APPLD。
陸軍研究員加勒特·沃內爾博士說:“使用APPLD之類的方法,現(xiàn)有訓練設施中的現(xiàn)役士兵只需簡單地正常操作車輛就能夠為自主系統(tǒng)的改進做出貢獻。”“像這樣的技術將為陸軍設計和部署能夠在越野部署環(huán)境中自動導航的下一代戰(zhàn)斗車輛的計劃做出重要貢獻。”
研究人員將演示算法和更多經典的自主導航系統(tǒng)中的機器學習融合在一起。APPLD并沒有完全取代經典系統(tǒng),而是學習如何調整現(xiàn)有系統(tǒng)使其表現(xiàn)得更像人類演示。Warnell說,這種范例使部署的系統(tǒng)可以保留傳統(tǒng)導航系統(tǒng)的所有優(yōu)點,例如最優(yōu)性,可解釋性和安全性,同時還可以使系統(tǒng)靈活并適應新環(huán)境。
Warnell說:“使用日常的Xbox無線控制器提供的一次人類駕駛演示,使APPLD學習了如何根據特定的本地環(huán)境以不同的方式調整車輛現(xiàn)有的自動導航系統(tǒng)。”“例如,在狹窄的走廊中,駕駛員放慢速度并小心駕駛。觀察到這種行為后,自動駕駛系統(tǒng)學會了在類似的環(huán)境中也降低其最大速度并增加其計算預算。這最終使車輛能夠成功在以前失敗的其他狹窄走廊中自主導航。”
這項研究是陸軍開放校園計劃的一部分,德克薩斯州的陸軍科學家通過該計劃與UT Austin的學術合作伙伴進行合作。
UT奧斯丁機器人聯(lián)盟的教授兼主席彼得·斯通博士說:“ APPLD是UT奧斯汀與陸軍研究實驗室之間獨特的合作安排促進了研究成果不斷增長的又一個例子。”“通過將沃內爾博士全職安排在UT奧斯汀分校,我們能夠迅速發(fā)現(xiàn)并解決研究問題,這些研究問題既是尖端的科學進步,也是與軍隊直接相關的。”
團隊的實驗表明,經過培訓后,APPLD系統(tǒng)比傳統(tǒng)系統(tǒng)能夠更快地導航測試環(huán)境,并且減少故障。此外,受過訓練的APPLD系統(tǒng)通常比受過訓練的人在環(huán)境中的導航更快。經同行評審的期刊《IEEE機器人與自動化快報》發(fā)表了該團隊的工作:APPLD:從演示中學習自適應規(guī)劃器參數(shù)。
“從機器學習的角度來看,APPLD與試圖從頭開始學習整個導航系統(tǒng)的所謂的端到端學習系統(tǒng)形成了鮮明的對比。”“這些方法往往需要大量數(shù)據,并且可能導致行為既不安全也不穩(wěn)健。APPLD利用了經過精心設計的控制系統(tǒng)部分,同時將其機器學習工作集中在參數(shù)調整過程上,這是通常是根據一個人的直覺來完成的。”
APPLD代表了一種新的范例,在該范例中,不具備機器人專業(yè)知識的人可以在各種環(huán)境中幫助訓練和改善自動駕駛汽車導航。而不是由工程師組成的小型團隊試圖在少數(shù)測試環(huán)境中手動調整導航系統(tǒng),實際上,數(shù)量不受限制的用戶將能夠向系統(tǒng)提供所需的數(shù)據,以將其自身調整到不受限制的環(huán)境中。
陸軍研究員喬納森·芬克(Jonathan Fink)博士說:“對于每個新的部署環(huán)境,通常都必須手動重新調整當前的自主導航系統(tǒng)。”“此過程非常困難-必須由接受過機器人技術培訓的人員來完成,并且需要反復試驗,直到找到正確的系統(tǒng)設置為止。相反,APPLD通過觀察人工駕駛來自動調整系統(tǒng)系統(tǒng)-任何人只要有視頻游戲控制器的經驗就可以做。在部署過程中,APPLD還允許系統(tǒng)隨著環(huán)境的變化實時地重新調整自身。”
陸軍對下一代戰(zhàn)斗車輛進行現(xiàn)代化改造的重點包括設計可以在越野部署環(huán)境中自動導航的可選有人駕駛戰(zhàn)斗車輛和機器人戰(zhàn)斗車輛。士兵們可以駕駛當前的戰(zhàn)車在這些環(huán)境中導航,但對于先進的自主導航系統(tǒng)而言,環(huán)境仍然充滿挑戰(zhàn)。APPLD和類似方法為陸軍改善現(xiàn)有的自主導航能力提供了新的潛在途徑。
“除了與陸軍直接相關之外,APPLD還為彌合傳統(tǒng)工程方法與新興機器學習技術之間的鴻溝提供了機會,從而在現(xiàn)實世界中創(chuàng)建了強大,自適應和多功能的移動機器人。”肖學蘇,UT Austin的博士后研究員,論文的主要作者。
為了繼續(xù)這項研究,研究小組將在各種戶外環(huán)境中測試APPLD系統(tǒng),雇用士兵駕駛員,并嘗試使用多種現(xiàn)有的自動導航方法。此外,研究人員將調查是否包含其他傳感器信息(例如相機圖像)是否可以導致學習更復雜的行為,例如調整導航系統(tǒng)以在各種條件下(例如在不同地形或存在其他物體的情況下)
-
算法
+關注
關注
23文章
4709瀏覽量
95338 -
導航系統(tǒng)
+關注
關注
2文章
279瀏覽量
31359 -
機器學習
+關注
關注
66文章
8501瀏覽量
134573
發(fā)布評論請先 登錄
為什么MEMS組合導航系統(tǒng)是未來高精度定位的終極解決方案?
這款MEMS組合導航系統(tǒng)如何做到60秒高精度導航?

組合導航系統(tǒng)中的慣性導航系統(tǒng)是什么?

組合導航系統(tǒng)中的慣性導航系統(tǒng)是什么?
霍尼韋爾推出新一代慣性導航系統(tǒng) HGuide-N380

智能導航系統(tǒng)中的數(shù)據采集標注案例分享
數(shù)據采集標注在智能導航系統(tǒng)中的應用案例

導航分析儀的技術原理和應用場景
智能駕駛與自動駕駛的關系
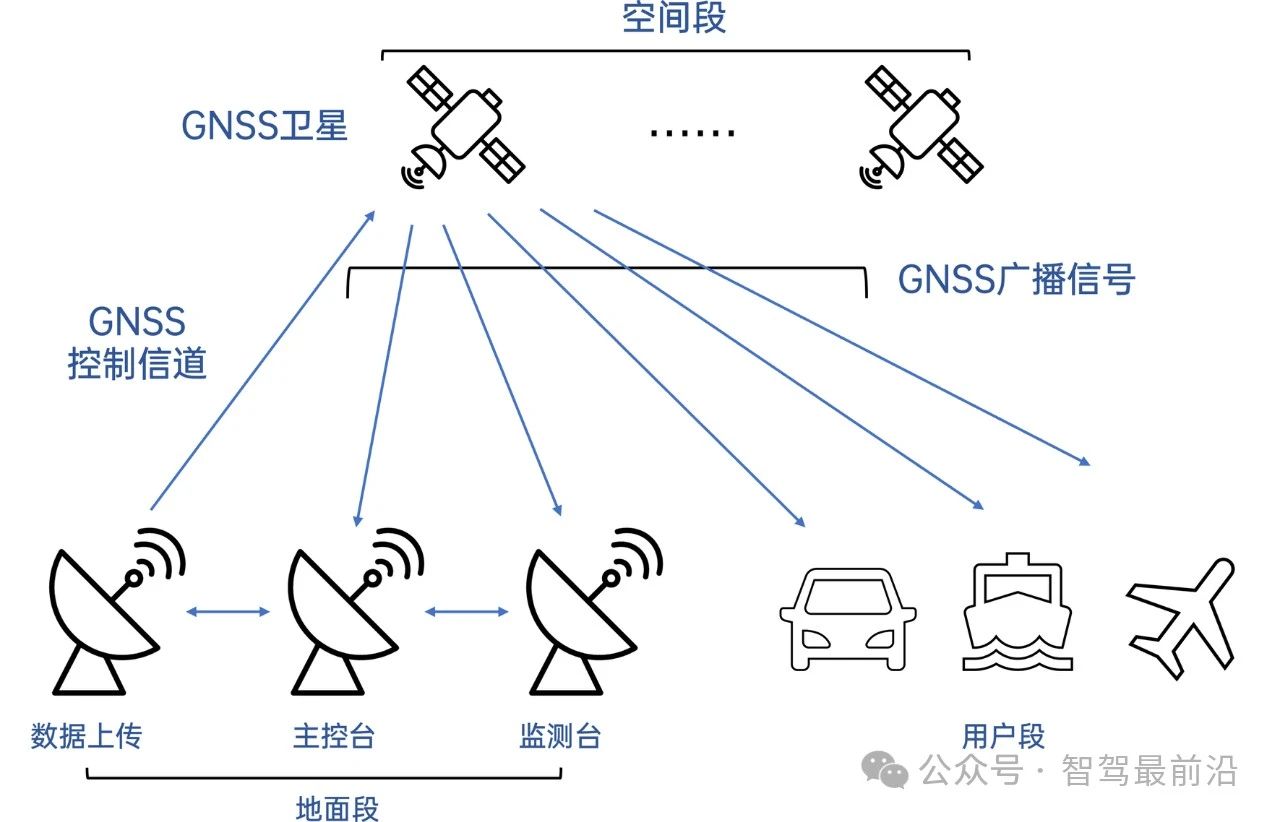
為什么自動駕駛中全球導航衛(wèi)星系統(tǒng)如此重要?
一種完全分布式的點線協(xié)同視覺慣性導航系統(tǒng)






 工商網監(jiān)
工商網監(jiān)
評論