") KUKA機(jī)器人的涂膠控制
KUKA機(jī)器人的涂膠控制
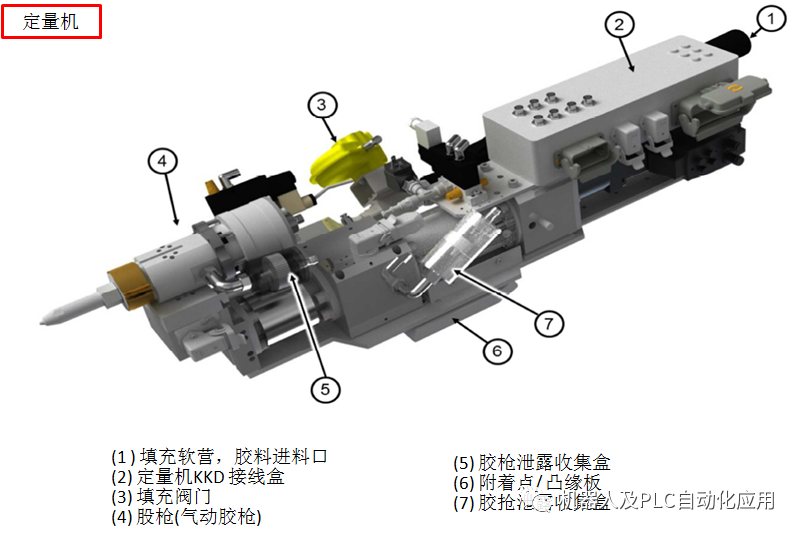
氣動(dòng)膠槍:

定量機(jī)以一定的速度運(yùn)行形成噴膠壓力。
1.涂膠設(shè)備定量機(jī)電機(jī)采用增量式電機(jī),每次斷電后都要自動(dòng)進(jìn)行零點(diǎn)校正,也就是找到它上行程開光。
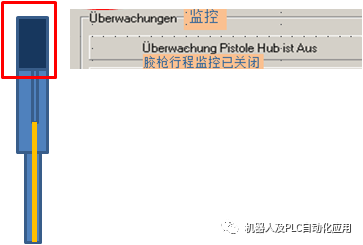
2.定量機(jī)在校正前要確認(rèn)膠槍處于關(guān)閉狀態(tài),比如DURR會(huì)檢測(cè)膠槍的開口行程。
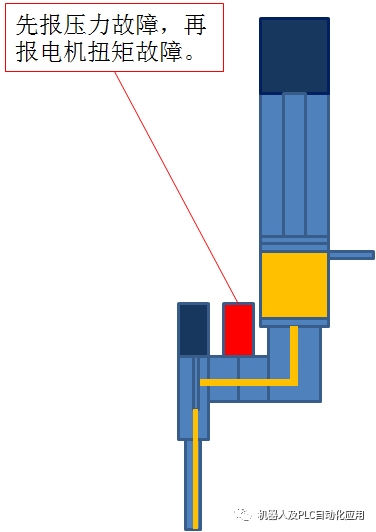
3.定量機(jī)的壓力傳感器壓力的檢測(cè)范圍會(huì)小于定量機(jī)電機(jī)扭矩檢測(cè)值。
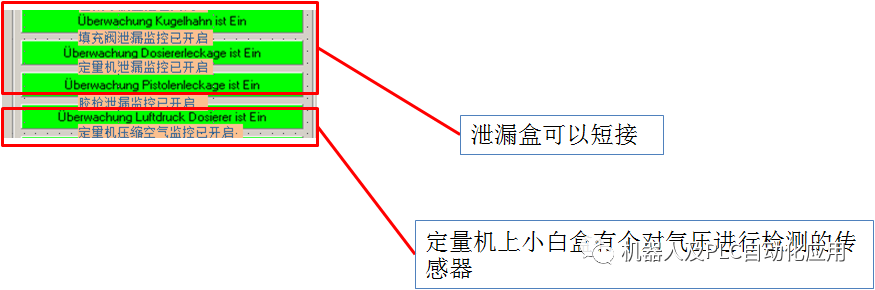
膠槍的行程監(jiān)控:
噴射螺紋涂膠設(shè)備


定量機(jī)的壓力開關(guān)與電機(jī)的力矩監(jiān)控的順序.
短珠電膠槍

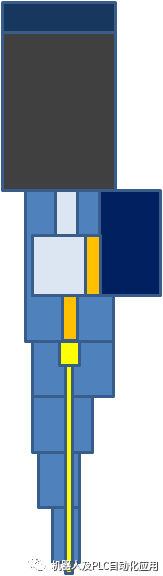

電機(jī)膠槍之所以需要校正工具是因?yàn)椋姍C(jī)轉(zhuǎn)子的轉(zhuǎn)頭需要有一個(gè)和膠槍嘴的正確安裝位置,所以需要校正工具來(lái)清零,清零時(shí)電機(jī)不能得電旋轉(zhuǎn),清零后再校正電機(jī)。
常見故障1: 預(yù)壓無(wú)法建立
預(yù)壓的建立:
1.建立預(yù)壓用于在開始涂膠前的準(zhǔn)備,只有建立預(yù)壓后才能開始涂膠.
2.建立預(yù)壓時(shí)膠槍嘴要處于關(guān)閉狀態(tài).
產(chǎn)生故障的原因:
1.膠槍嘴關(guān)閉不嚴(yán),有漏膠現(xiàn)象.(膠槍故障)
2.定量機(jī)有漏膠,在建立預(yù)壓時(shí),膠從漏膠點(diǎn)漏出.
3.定量機(jī)電機(jī)損壞,無(wú)法建立壓力,只能填膠,不能清膠和 涂膠.
?Fehler max. ZeitbisVordruck OK erreicht實(shí)現(xiàn)預(yù)壓的最大時(shí)間錯(cuò)誤
2.檢查程序窗口平均壓力是否為0,如果為0,可隨意賦一個(gè)不為20到100的值。
3.檢查膠槍是否損壞,或更換備件測(cè)試
4.檢查定量機(jī)電機(jī)是否損壞,或更換備件測(cè)試
-----------------------------------
?FehlerDosiererFüllzeit定量機(jī)填充時(shí)間過(guò)長(zhǎng)錯(cuò)誤---------- 進(jìn)膠緩慢
1.檢查膠泵氣壓是否足夠,可以適當(dāng)提高,但不可以超過(guò)4.5bar。(膠泵壓力)
2.也可嘗試將膠水加熱溫度適當(dāng)提高。如均無(wú)效果,查看膠管或者閥是否堵塞。溫度低進(jìn)膠緩慢, 膠管堵,過(guò)濾網(wǎng)堵,填充閥堵
3.也可臨時(shí)將填充時(shí)間監(jiān)控值(參數(shù)窗口--定量機(jī)窗口里面)改大,消除報(bào)錯(cuò)后等待停產(chǎn)再詳查。

定量機(jī)缺少 6bar 壓縮空氣
1.檢查定量機(jī)一側(cè)供氣是否低于5bar,如低于5bar,則需加大氣壓。
2.如無(wú)法立馬加大氣壓,可在參數(shù)窗口--配置窗口,關(guān)閉定量機(jī)壓縮氣監(jiān)控。
超過(guò)峰值壓力:
該錯(cuò)誤將在膠槍嘴離工件太近時(shí)出現(xiàn),可在程序窗口將峰值壓力監(jiān)控值改到150,或者更大。
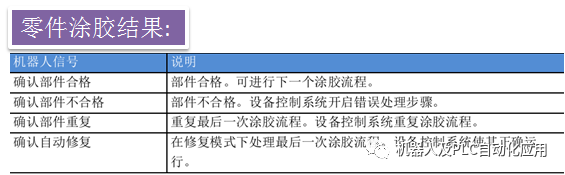
機(jī)器人控制部分:
| Kleben 1 | Makro 180 - 189 | 涂膠宏程序180-189 |
| 180 | KL1 Start | 涂膠指令 開始 |
| 181 | KL1 Ende / Auswertung | 涂膠指令 結(jié)束 |
| 182 | KL1 Spuelen Start | 涂膠清洗開始 |
| 183 | KL1 Spuelen Ende | 涂膠清洗結(jié)束 |
| 184 | BT Zeigen / Fehlerauswertung | 涂膠工件展示 |
| 185 | KL1 Spueleimer in Ruhestellung schwenken | 在擺臂原位位置清洗 |
| 186 | KL1 Spueleimer in Arbeitsstellung schwenken | 在擺臂工作位置清洗 |
| 187 | KL1 Spueleimer Position erreicht | 清洗位置到達(dá) |
| 188 | KL1 2K Start | 2K 開始 |
| 189 | KL1 Prozesskontrolle | 過(guò)程控制 |
常用IO信號(hào):
E1527 準(zhǔn)備就緒
A1529機(jī)器人開始控制涂膠設(shè)備-啟動(dòng)程序
A1530 機(jī)器人模擬運(yùn)行(不帶工具)
E1532 定量機(jī)1已加注 A1532更換定量機(jī)
E1533 定量機(jī)2已加注 A1533觸發(fā)預(yù)壓
E1534 清膠請(qǐng)求 A 1534 清膠許可
E1535 清膠正在運(yùn)行 A1535 沖洗
E1536 清膠已經(jīng)結(jié)束
A1544 膠槍打開
E1545系統(tǒng)為開啟狀態(tài) A1545系統(tǒng)部件啟動(dòng)
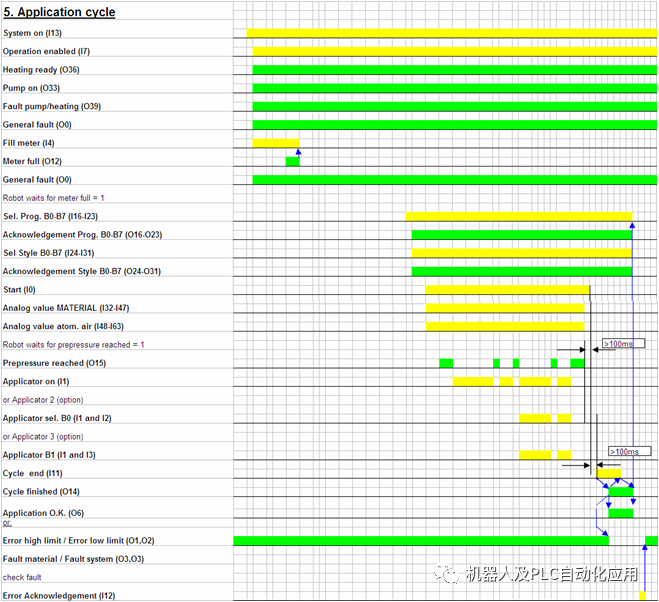
涂膠控制信號(hào)時(shí)序
涂膠得模擬量控制:
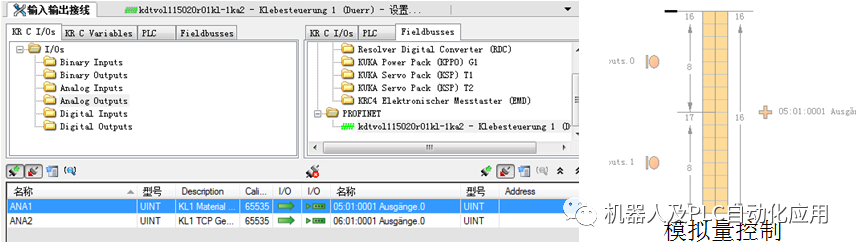
ana1 ( EIN ) =VPROP: 312 [mm/Sek] OFFS:0[mV] -膠量控制
ana2 ( EIN ) =VPROP: 500 [mm/Sek] OFFS:0[mV] -噴氣量的控制
bin10 ( EIN ) -涂膠的程序號(hào)
bin11 ( EIN ) -涂膠程序號(hào)里的段號(hào)
F523:用于帶擺臂膠桶控制閥帶先導(dǎo)閥
F524: 用于帶擺臂膠桶控制閥不帶先導(dǎo)閥
"膠槍開"始要在機(jī)器人的直線軌跡上

-
電機(jī)
+關(guān)注
關(guān)注
143文章
9243瀏覽量
148252 -
增量式
+關(guān)注
關(guān)注
0文章
14瀏覽量
8808 -
KUKA機(jī)器人
+關(guān)注
關(guān)注
4文章
144瀏覽量
9470
原文標(biāo)題:KUKA機(jī)器人的涂膠控制
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
KUKA機(jī)器人使用說(shuō)明書
庫(kù)卡KUKA機(jī)器人常見故障維修
KUKA機(jī)器人編程說(shuō)明(英文)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
鴻蒙機(jī)器人與鴻蒙開發(fā)板聯(lián)動(dòng)演示
MT6501磁編IC在涂膠機(jī)器人領(lǐng)域應(yīng)用

Al大模型機(jī)器人
如何使用PLC控制機(jī)器人
機(jī)器人控制系統(tǒng)的基本單元有哪些
Kuka機(jī)器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論