") 北醒激光雷達(dá)應(yīng)用于AGV避障的兩種方法介紹
北醒激光雷達(dá)應(yīng)用于AGV避障的兩種方法介紹
2019年倉儲(chǔ)AGV(Automated Guided Vehicle,簡稱AGV)企業(yè)開發(fā)的熱點(diǎn)是從“貨架到人”到“貨箱到人”,2020年受全國疫情影響,又催生企業(yè)開發(fā)出醫(yī)用物流AGV等新興應(yīng)用領(lǐng)域。不過,AGV行業(yè)如何變化和升級,都離不開“避障”這一門小而精的課題。
圖1 倉儲(chǔ)AGV圖片
01、激光雷達(dá)在AGV應(yīng)用的避障方法
市場上關(guān)于AGV避障的方法多種多樣,各有優(yōu)劣。本文主要介紹北醒激光雷達(dá)應(yīng)用于AGV避障的兩種主要方法:單點(diǎn)定向避障和固態(tài)3D面陣定向避障兩種。

單點(diǎn)定向避障
北醒TF系列單點(diǎn)激光雷達(dá)避障模塊是基于ToF(Time of Flight時(shí)間飛行原理)的激光測距技術(shù),用于0.1m-12m近距離的障礙物探測與避障功能。原理和使用方法都比較簡單,雷達(dá)輸出最近障礙物的距離值,從而指導(dǎo)系統(tǒng)進(jìn)行剎車或減速的指令,是移動(dòng)機(jī)器人/AGV近距離低矮障礙物探測的低成本首選可靠方案。
主要特點(diǎn)如下
測量精度高,感知穩(wěn)定
視場角小,準(zhǔn)直度好,避免誤觸發(fā)
100-1000Hz數(shù)據(jù)刷新率,靈敏避障
多通訊接口可選,即插即用
耗電量極低,重量輕,易集成
不產(chǎn)生回波干擾、地面不平等誤報(bào)現(xiàn)象
圖2 單點(diǎn)定向避障激光雷達(dá)示意圖
圖3 上位機(jī)測距顯示圖(圓圈處有障礙物)
固態(tài)3D面陣定向避障
北醒CE30 3D面陣固態(tài)激光雷達(dá)也是一種定向避障方式,不同于單線及多線掃描避障方式。我們熟知的單線和多線旋轉(zhuǎn)雷達(dá)均安裝于AGV頂端,實(shí)現(xiàn)360°或特定角度避障,而CE30通過發(fā)射一束橢圓錐形光束,探測出固定視線范圍內(nèi)的障礙物信息,是低矮水平面且固定路徑導(dǎo)航AGV避障的首選低成本方案。
主要特點(diǎn)如下
1°角分辨率高,精確識別障礙物位置
自定義避障模式和二次開發(fā)避障模式可選
20Hz初始探測頻率,避障響應(yīng)更快
小體積,自帶安裝孔,可直接嵌入機(jī)器
內(nèi)部無旋轉(zhuǎn)部件,結(jié)構(gòu)可靠穩(wěn)定性一致
不產(chǎn)生回波干擾、地面不平等誤報(bào)現(xiàn)象
圖4 3D面陣定向避障激光雷達(dá)示意圖
圖5 自定義避障模式示意圖(圖中矩形區(qū)域)
自定義避障模式是專門為AGV避障應(yīng)用開發(fā)的模式。如圖5所示,該模式下,CE30 將會(huì)為AGV篩選出最關(guān)鍵的避障目標(biāo),也就是警戒區(qū)內(nèi)目標(biāo)A,將此目標(biāo)的距離信息提供給AGV。可根據(jù)客戶需求定制避障區(qū)域。
圖6 二次開發(fā)避障模式(實(shí)際場景圖(上)和雷達(dá)拍攝的深度圖(中)及點(diǎn)云圖(下)對比)
二次開發(fā)避障模式是為AGV提供障礙物的點(diǎn)云圖,以此“描繪”出障礙物的大致輪廓。在預(yù)設(shè)情況下,CE30會(huì)輸出一幅深度圖和與之對應(yīng)的每一個(gè)像素信號強(qiáng)度數(shù)據(jù)。深度圖中每個(gè)像素的深度值表示該像素對應(yīng)探測點(diǎn)到雷達(dá)前表面的投影距離。如圖6所示,分別展示了普通灰度相機(jī)拍攝的實(shí)際場景圖(上)、 同一位置 CE30拍攝的深度圖(中)和根據(jù)深度數(shù)據(jù)繪制的點(diǎn)云圖(下,從略高于 CE30位置觀察)。
02、激光雷達(dá)在AGV及倉儲(chǔ)應(yīng)用案例
倉儲(chǔ)AGV避障
將一個(gè)CE30激光雷達(dá)安裝在倉儲(chǔ)AGV的正前方,實(shí)時(shí)監(jiān)測前方障礙物,控制AGV減速或剎車,輔助其快速存取貨、智能搬運(yùn)等功能。
方案優(yōu)勢:支持多機(jī)協(xié)作,可抗倉庫中環(huán)境光的干擾,結(jié)構(gòu)不易損壞,可靠穩(wěn)定。
倉儲(chǔ)叉車避障
將TFmini-Plus安裝在叉車叉腳正前方,識別前方障礙物距離信息反饋給叉車,叉車系統(tǒng)進(jìn)行處理后,進(jìn)行防撞或輔助定位托盤位置。
方案優(yōu)勢:工控行業(yè)深耕時(shí)間長,針對客戶非標(biāo)定制,匹配度高,在低成本避障方向,性價(jià)比高。
立體倉庫避障
將兩個(gè)TFmini Plus分別安裝在智能穿梭車的前后方,實(shí)時(shí)監(jiān)測前后方障礙物及距離信息,控制小車減速或急停,從而實(shí)現(xiàn)存取貨、搬運(yùn)、避障等功能。
方案優(yōu)勢:可直接安裝在小車上,安裝便捷,快速調(diào)試,性價(jià)比高,避障精準(zhǔn)。
責(zé)任編輯:gt
-
AGV
+關(guān)注
關(guān)注
27文章
1431瀏覽量
42021 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4199瀏覽量
192019
發(fā)布評論請先 登錄
AGV機(jī)器人如何實(shí)現(xiàn)毫秒級避障?深度解析多傳感器融合的核心技術(shù)

10000Hz!超高頻激光雷達(dá)助力無人機(jī)避障
鐳神智能激光雷達(dá)飛行汽車/eVTOL避障系統(tǒng)解決方案—開啟低空安全飛行新未來

雙通道14位模數(shù)轉(zhuǎn)換器SC1259替換AD9258應(yīng)用于激光雷達(dá)

北醒CES 2025展出高性能激光雷達(dá),引領(lǐng)行業(yè)發(fā)展
北醒攜新一代航空器用激光雷達(dá)亮相CES2025

全場景適用!TS Spectrum高速數(shù)字化儀在激光雷達(dá)系統(tǒng)中的應(yīng)用
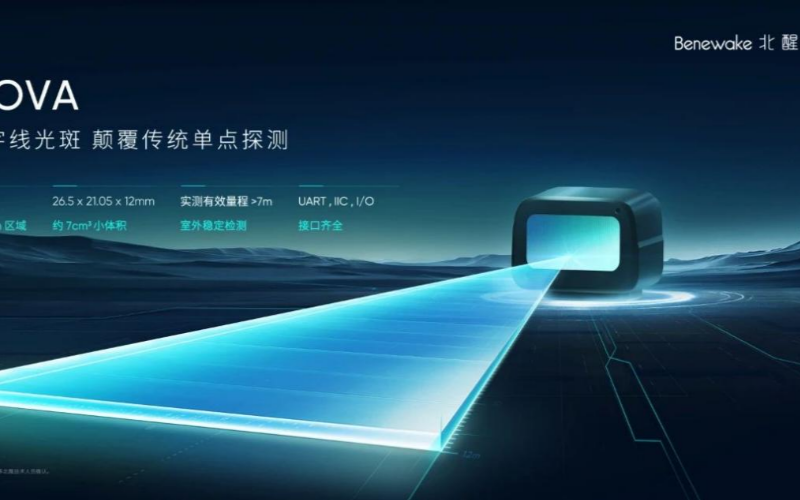
一字線光斑激光雷達(dá),開拓創(chuàng)新應(yīng)用賽道?
激光雷達(dá)的維護(hù)與故障排查技巧
TS高速數(shù)字化儀在激光雷達(dá)系統(tǒng)中的應(yīng)用
LIDAR激光雷達(dá)逆向建模能用到revit當(dāng)中嗎
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
激光雷達(dá)與毫米波雷達(dá)的優(yōu)缺點(diǎn)是什么






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論