 AGV機器人如何實現毫秒級避障?深度解析多傳感器融合的核心技術
AGV機器人如何實現毫秒級避障?深度解析多傳感器融合的核心技術

一、AGV多傳感器融合實時避障系統介紹
1.簡介
傳感器融合技術是機器人實現全覆蓋避障的關鍵,其原理仿效人腦綜合處理信息的方式:通過協調多種傳感器(如激光雷達、視覺攝像頭等)進行多層次、多維度的信息整合,彌補單一傳感器的局限,最終構建出對環境的一致性感知。該技術既能融合多源數據的互補優勢(如精準測距與物體識別),又能通過智能算法優化信息處理流程,使AGV(自動導引車)在復雜動態環境中同步提升避障精度與環境適應力。
2.提高檢測精度
融合激光雷達(精確測距,但強光易干擾)、視覺(識別物體類型,弱光受限)及超聲波(近距盲區探測)等多傳感器數據,互補短板,增強障礙物識別準確性。
3.強化系統可靠性
冗余設計確保單一傳感器故障時(如激光雷達失效),其他傳感器仍可維持避障;結合卡爾曼濾波等算法,濾除噪聲干擾,提升數據穩定性。
4.擴展環境適應性
動態切換優勢傳感器應對復雜場景,如電磁干擾時選用抗擾數據、煙霧環境中融合超聲波與激光雷達,并針對透明/懸空障礙物啟用紅外等專項傳感器。
5.優化避障決策
通過多傳感器分區感知(如前方劃設避障/繞行區),綜合障礙物距離(激光雷達)、類型(視覺)及近距信息(超聲波),生成全局環境模型,精準規劃最優路徑。
二、多傳感器融合避障原理
1.典型布局
前方主避障:左右2D激光水平掃描障礙,底部超聲波補充低矮障礙檢測,前上方斜置3D激光覆蓋立體空間。
側向防護:兩側斜裝深度相機,消除AGV橫向盲區。
貨叉防撞:貨叉搭載IMU實時監測姿態,結合上下3D激光數據,動態預測貨叉運動軌跡并防護周邊區域。
叉間防撞:雙超聲波傳感器監控車尾兩側扇形區域障礙物。

(↑多傳感器融合典型布局圖)
2.融合方法
數據級:統一多傳感器時間戳與坐標系,直接合并點云數據。
特征級:融合激光雷達邊緣特征與視覺SIFT特征,利用PointNet++(點云)和CNN(圖像)進行深度學習,或通過EKF生成障礙物概率地圖。
決策級:貝葉斯網絡動態加權各傳感器置信度,緊急場景超聲波觸發急停,激光雷達規劃繞行路徑。
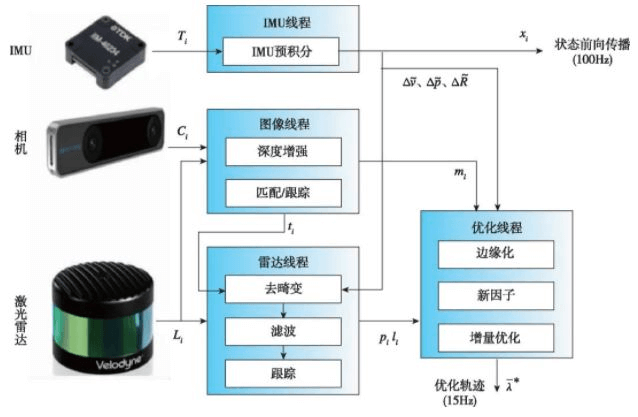
(↑多傳感器緊耦合融合經典方法)
3.環境感知
遠近分工:3D雷達點云檢測遠端全局障礙,深度相機識別近端局部障礙。
障礙物定義:包括人員、貨物、叉車等具有體積的物體,核心流程為“檢測→跟蹤→定位”(確認存在→軌跡預測→距離計算)
語義地圖:通過實例分割標注障礙物類別(如貨架、電梯),提取輪廓映射至地圖,支撐智能避障決策。
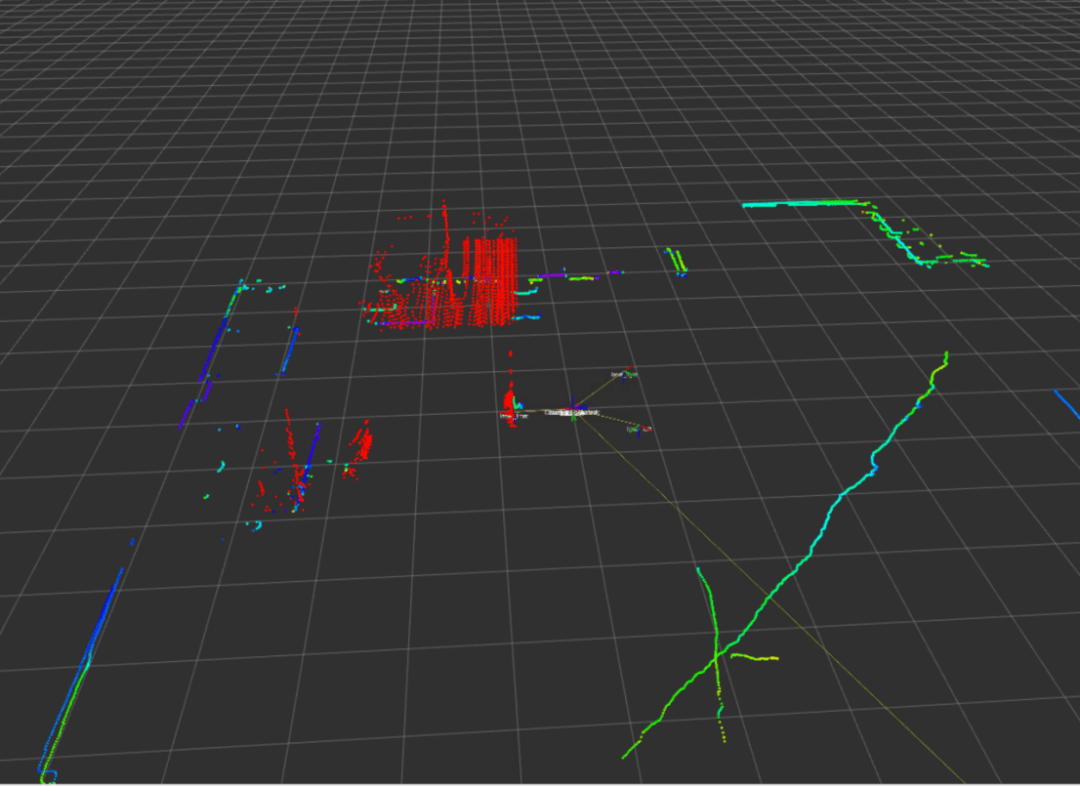
(↑2d與3d點云數據級融合純點云地圖(三維視角))
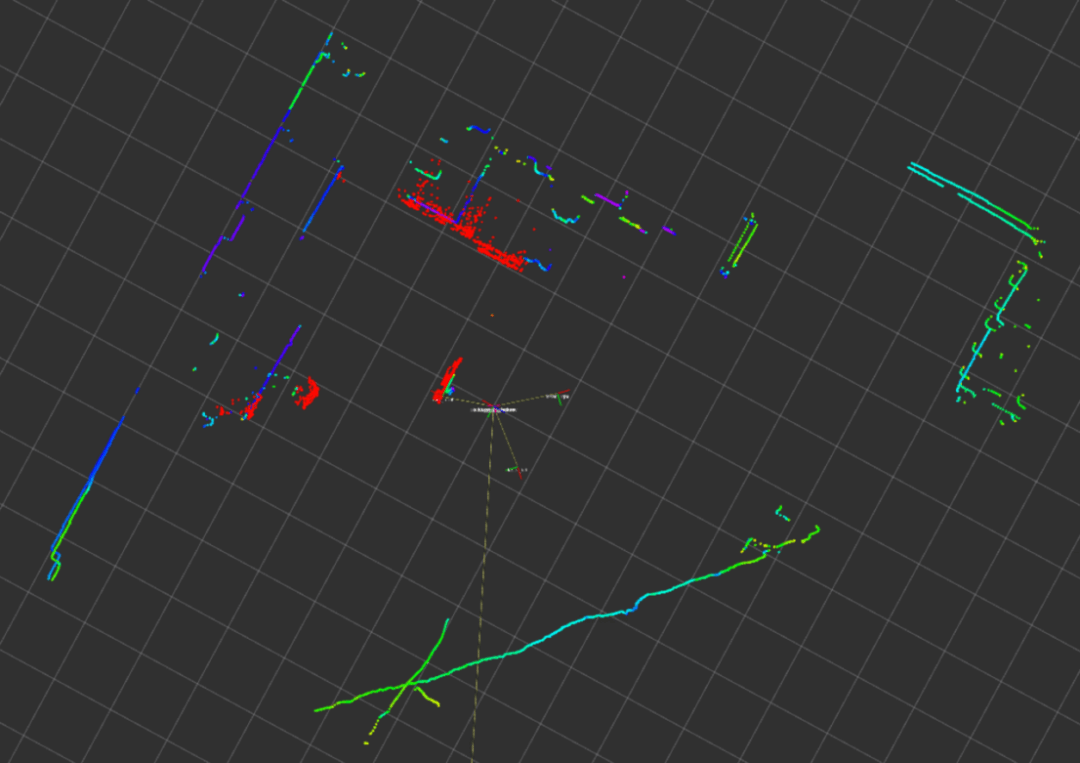
(↑2d與3d點云數據級融合純點云地圖(俯視視角))
全局避障處理流程:針對點云數據量大且含噪聲的問題,先進行濾波降采樣;分割地面點云后,通過聚類算法分割地面障礙物團簇,擬合包圍框標注中心/尺寸等屬性;結合點云目標檢測框架(如PointPillar)進行語義標注與跟蹤,并構建卡爾曼濾波器平滑軌跡,同步優化算力保障實時性;存在運動畸變時需補償校正。
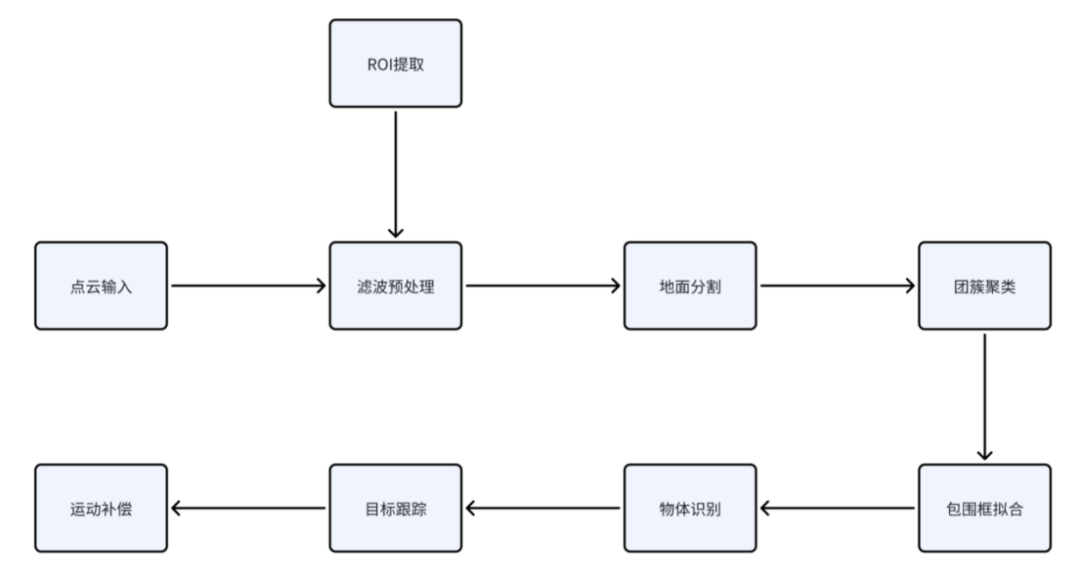
(↑點云避障感知層算法框架)
4.實時避障算法
局部避障:深度相機覆蓋車身近周區域,貨叉IMU實時反饋姿態角,底部傳感器監測空間障礙。
路徑重規劃:基于AGV速度(100-200ms周期),通過動態窗口法采樣可行軌跡,預測動態障礙運動趨勢,實時優化路徑。
強化學習輔助:結合DQN、PPO等算法,在仿真環境中訓練AGV適應復雜動態場景,提升自主決策能力。
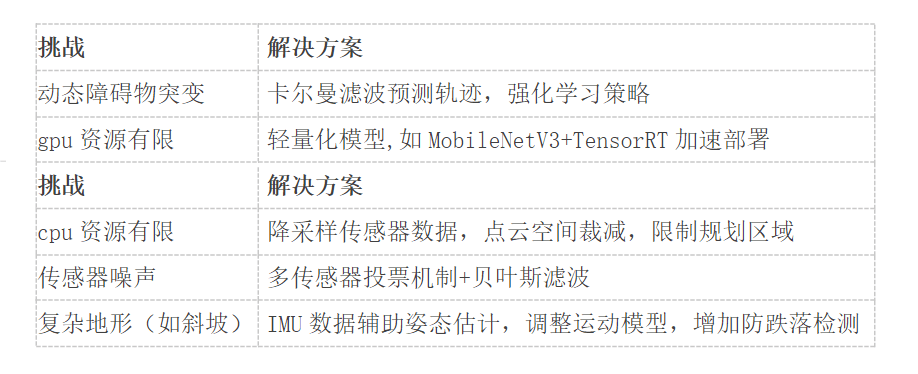
三、多傳感器融合避障挑戰與未來
1.AGV避障應用場景
AGV避障實際應用場景中,往往會遇到一些困難,以下列舉一些挑戰和解決方案:
2.未來方向
仿生策略:模仿蟻群/鳥群行為,預測動態障礙物軌跡。
神經融合:端到端模型(如PointNet+++Transformer)直接處理LiDAR與視覺數據。
類腦架構:脈沖神經網絡(SNN)實現低功耗決策,LSTM+注意力機制預測長時序障礙物運動。
協同計算:云-邊-端分層處理,降低車載算力壓力。
仿真遷移:域隨機化增強泛化性,在線自適應實時微調模型(如Meta-RL)。
群體智能:聯邦學習優化多AGV路徑,博弈論動態協調通行權。
目標:構建“感知-決策-控制”全鏈路智能化系統,通過生物啟發算法、跨域協同(V2X/數字孿生)及高能效硬件,實現復雜環境下類人駕駛能力,兼顧安全、效率與倫理。
-
傳感器
+關注
關注
2565文章
52954瀏覽量
766999 -
激光雷達
+關注
關注
971文章
4232瀏覽量
192792 -
agv機器人
+關注
關注
1文章
69瀏覽量
6784
發布評論請先 登錄
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
《RK3588核心板:AIoT邊緣計算的革命性引擎,能否解鎖智能物聯新范式?》
一種基于分數階 PID 直流電機調速的 AGV 控制系統
涂鴉運動子系統實現突破性創新!毫米級貼邊+高智商清掃重新定義移動機器人
涂鴉運動子系統實現突破性創新!毫秒級貼邊+高智商清掃重新定義移動機器人


《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
agv搬運機器人是怎么實現無人搬運的?

Sonair推出用于機器人避障的3D超聲波傳感器
智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?

精準定位,深度清潔:揭秘工廠清潔機器人的核心技術
AGV系統設計解析:布局-車體-對接-數量計算-路徑規劃






 工商網監
工商網監
評論