 新松機器人的軸孔裝配工業機器人系統專利
新松機器人的軸孔裝配工業機器人系統專利
新松機器人發明的軸孔裝配工業機器人,通過這種工作精度高且接觸力可控的軸孔裝配工業機器人可以完成精準的軸孔裝配任務,而設置在該機器人中的運動計算模塊、電機驅動模塊以及力控制模塊控制著整個機器人的動作,最終完成精準的軸孔裝配。
集微網消息,數控加工在制造業已被廣泛應用,隨著加工零件的復雜度增加和精度的提高,一些精細零件的加工與裝配作業依靠普通的數控機床已經不能滿足需求。
例如高精度的軸孔裝配作業,由于環境中存在諸多不確定性和突發事件,使得裝配作業時常發生故障,在常規位置控制下,裝配工業機器人裝配件之間的微小偏差可能使裝配件不能完成裝配,導致裝配作業失敗,甚至造成對裝配工件及周邊設備的損傷。
生活中常用的技術中,一些方法利用軸孔空間的“碗狀約束域”實現了軸孔的裝配,一些方法使用了多軸孔裝配裝置,該裝配裝置是根據剛性軸孔裝配任務的特點,針對彈性多軸孔裝配動作而設計的,但是大多采用單一的位置控制模式設計的,而對接觸力不能夠進行控制,不適用于對接觸力要求較為嚴格的裝配作業。
而另外的柔順性實現軸孔裝配技術,利用增大位置環增益完成裝配任務,可以實現對孔運動的情況下的軸孔裝配作業,但其仍然是靠位置控制來實現軸孔裝配,不能夠對接觸力進行控制,在對裝配精度要求較高或剛度較低的工件進行裝配作業時,其接觸力的不可控性容易造成裝配失敗或者工件的損傷。
針對這些問題,新松機器人在13年11月14日申請了一項名為“軸孔裝配工業機器人系統及其工作方法”的發明專利(申請號:201310578100.8),申請人為沈陽新松機器人自動化股份有限公司。
根據目前公開的專利資料,讓我們一起來看看這項軸孔裝配機器人吧。
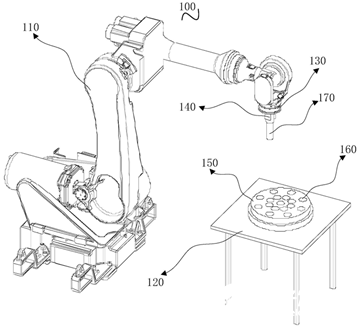
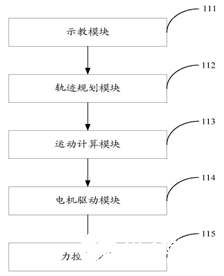
如上圖所示為軸孔裝配工業機器人系統的結構示意圖,這個工業機器人系統主要包括:工業機器人110、軸孔裝配平臺120、力覺傳感器130、夾持裝置140、裝配工件150、裝配孔160及裝配軸170,此外該系統還包括示教模塊111、軌跡規劃模塊112、運動計算模塊113、電機驅動模塊114及力控制模塊115,具體的功能模塊示意如下圖所示。
其中,工業機器人與軸孔裝配平臺的底座固定在同一基準面上,夾持裝置安裝于工業機器人的手臂末端,裝配工件固定在軸孔裝配平臺上。力覺傳感器安裝在手臂末端與夾持裝置之間,用于實時測量裝配軸與裝配孔間接觸力。
該工業機器人為六自由度工業機器人,何為六自由度呢?物體在空間具有六個自由度,即沿x、y、z三個直角坐標軸方向的移動自由度和繞這三個坐標軸的轉動自由度。因此,要完全確定物體的位置,就必須清楚這六個自由度。擁有六自由度的工業機器人在工作范圍內除奇異點外能夠自由調節工業機器人手臂末端在笛卡爾坐標系下的三個軸向位置和繞三個坐標軸轉動的姿態。
和六自由度相匹配的是,力覺傳感器為六維力覺傳感器,能夠檢測笛卡爾坐標系下三個方向的力和繞三個方向的力矩。工業機器人通過示教及軌跡規劃生成一系列運動軌跡點,以使夾持裝置夾持裝配軸運動至裝配孔的上方。
運動計算模塊將運動軌跡點解析成對應時間點的關節空間下各關節角度,并傳送至電機驅動模塊,電機驅動模塊驅動工業機器人運動并帶動夾持裝置夾持裝配軸運動至裝配孔的上方。
如上圖為裝配機器人系統的工作流程圖,該裝配機器人系統先根據示教位置按照位置控制模式以速度v運動至子圖a狀態,然后在接觸力和位置同時控制的方式下繼續以速度v向下運動直至裝配軸與裝配孔間接觸力達到設定的恒定值f,如圖b所示。
然后采用搜孔單元進行搜孔,找到正確的裝配孔,但由于裝配軸與裝配孔的姿態不符可能會出現卡死現象如圖c1,為避免出現c1的情況發生,在找到裝配孔后裝配機器人在接觸力和位置同時控制的模式下,實時調整裝配軸的位姿,將裝配軸與裝配孔間的姿態扭矩控制在合理的微小范圍內的同時控制裝配軸向下運動。
當Z方向接觸力突然增大且三個方向的姿態扭矩依然處于合理范圍內時,說明裝配軸已經插入裝配孔的底部,如圖c2所示,此時完成裝配。
最后我們再來看看軸孔裝配工業機器人的工作方法的步驟流程,如下圖所示。
首先,工業機器人通過示教及軌跡規劃生成一系列運動軌跡點,以使夾持裝置夾持裝配軸運動至裝配孔上方,示教模塊控制工業機器人在笛卡爾空間和關節空間下進行點動,直至夾持裝置夾持裝配軸到達裝配孔正上方,并記錄關鍵的示教點。軌跡規劃模塊將示教點解析成平滑的樣條曲線,再將所條曲線按照時間點離散化成運動軌跡點。
其次,運動計算模塊將運動軌跡點解析成對應時間點的關節空間下各關節角度,并傳送至電機驅動模塊,電機驅動模塊驅動工業機器人運動并帶動夾持裝置夾持裝配軸運動至裝配孔上方。
最后,力控制模塊根據接觸力及裝配軸的位置,控制工業機器人運動使裝配軸與裝配孔以設定好的接觸力進行接觸,將裝配軸順利插入至裝配孔中。
以上就是新松機器人發明的軸孔裝配工業機器人,通過這種工作精度高且接觸力可控的軸孔裝配工業機器人可以完成精準的軸孔裝配任務,而設置在該機器人中的運動計算模塊、電機驅動模塊以及力控制模塊在這個過程中發揮著極其重要的作用,控制著整個機器人的動作,最終才能完成精準的軸孔裝配!
-
電機
+關注
關注
143文章
9258瀏覽量
148418 -
工業機器人
+關注
關注
91文章
3446瀏覽量
93747
發布評論請先 登錄
工業機器人與協作機器人概念不同

盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用






 工商網監
工商網監
評論