 哈工大新型仿象鼻柔性機器人 能自由伸縮
哈工大新型仿象鼻柔性機器人 能自由伸縮

隨著柔性機器人的迅速發展,人們越來越意識到,冰冷、僵硬只是我們對機器人的刻板印象。近日,國際著名期刊 SoftRobotics 刊登了哈爾濱工業大學冷勁松教授團隊與美國馬里蘭大學 Norman M. Wereley 教授團隊的共同研究成果,題為Novel Bending and Helical Extensile/Contractile Pneumatic Artificial Muscles Inspired by Elephant Trunk(受象鼻啟發的新型彎曲螺旋可伸展/收縮氣動人工肌肉)。
上述研究團隊受到象鼻的啟發,基于氣動人工肌肉(Pneumatic artificial muscles,PAMs),研制出了一種新型柔性機器人。
人造肌肉
在該研究中,“氣動人工肌肉”是一個核心元素。
氣動人工肌肉,是人造肌肉(artificial muscle)的一種。人造肌肉即電活性聚合物,是一種新型智能高分子材料,是根據生物學原理由纈氨酸、脯氨酸和甘氨酸這 3 種氨基酸按一定順序排列構成,可在外加電場下通過內部結構的改變而伸縮、彎曲、束緊或膨脹,非常接近生物的肌肉纖維。
而氣動人工肌肉,從字面意思上理解就是,由外部的壓縮空氣驅動進行推拉動作的人造肌肉,具有柔順性、輕量性、綠色性等優勢。這一材料重量輕(最小僅為 10g),卻能提供很大的力量,用“四兩撥千斤”來形容它再合適不過了。
實際上,由于具有與生物肌肉纖維相似的仿生編織結構、與骨骼肌相似的特性,氣動人工肌肉在軟體仿生機器人、變剛度靜水骨骼等領域都得到了廣泛的應用。此外,這類材料在醫學、機器人、軍事、航天、光學等領域都發揮著重要作用,具有巨大的商業潛力。
早在 20 世紀 40 年代,科研人員就開始對這一領域進行研究。2019 年 7 月,MIT 科研團隊還在 Science 發表論文,介紹了他們利用 2 種熱膨脹系數不同的聚合物材料高密度聚乙烯和環烯烴共聚物彈性體制成的新型人造肌肉,這種人造肌肉一經加熱,便可自由伸縮,提起比其自身重 650 倍的物體。這一研究也登上了當期 Science 封面。

【氣動人工肌肉 圖源百度百科】
“仿象鼻”柔性機器人
近年來,曾有不少研究團隊受花瓣、獵鷹、蛇、鴿子、魚、兔子等等的啟發,設計出多種形態的柔性機器人。而此次哈工大研究團隊受到象鼻的啟發,設計了新型的柔性機器人。
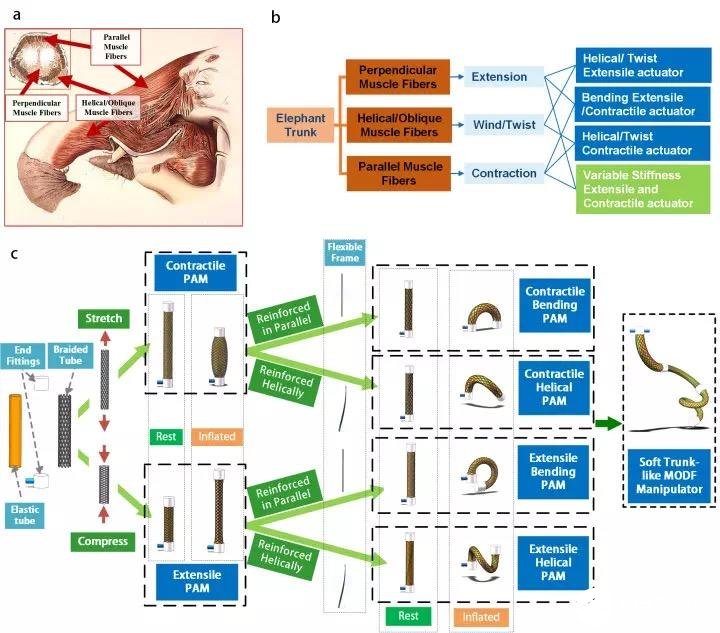
研究團隊指出,氣動人工肌肉運動在一定程度上僅局限于單軸收縮和拉伸,這也限制了其發展。
為此,該團隊在可伸展/收縮的氣動人工肌肉的基礎上設計了新型的彎曲螺旋可伸展/收縮氣動人工肌肉(HE-PAMs/HC-PAMs)。
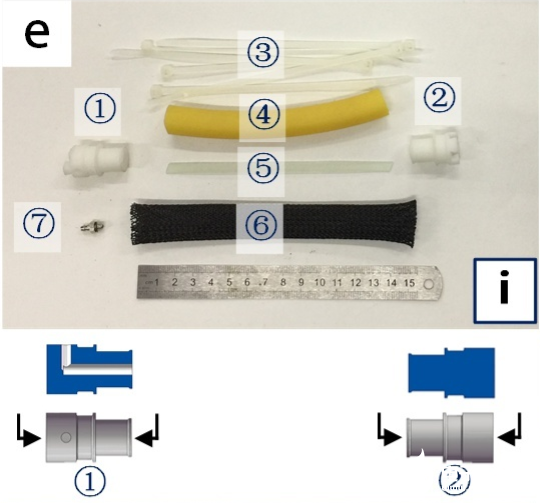
根據論文,HE-PAMs/HC-PAMs 主要是由端部配件、彈性管、編織管和嵌入式柔性框架組成(如下圖)。
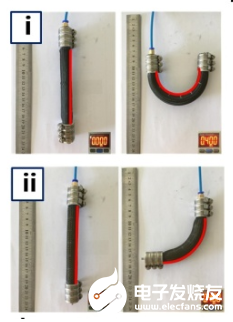
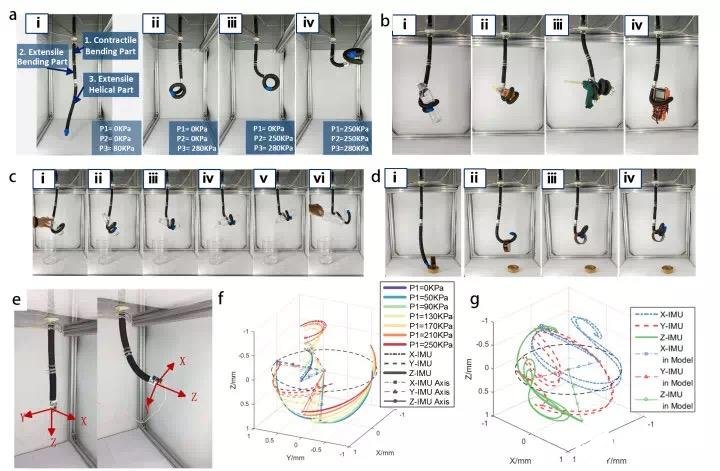
當 HE-PAMs/HC-PAMs膨脹時,將產生繞軸的彎曲、旋轉運動,使致動器產生螺旋變形,類似我們曾在動物園見過的象鼻彎曲旋轉的運動過程。
而區分伸展還是收縮,主要取決于“編織角度”——編織角度 > 54.74 度時為HE-PAMs(下圖 i);編織角度 < 54.74 度時為 HC-PAMs(下圖 ii)。
在此基礎之上,研究團隊通過一個仿象鼻的高自由度柔性臂來探索HE-PAMs/HC-PAMs在柔性機器人領域的潛在應用。研究人員表示,HC-PAMs 輸出、負載能力很強,而 HE-PAMs 可產生更多的變形。
值得一提的是,這一研究提出了統一的理論方法,將會為其他研究人員提供可靠的參考——該團隊通過實驗、分析,建立了氣動人工肌肉的廣義彎曲行為模型,并在相同的理論框架下研究了軸向、彎曲和螺旋氣動人工肌肉的特性。
據了解,軸向、彎曲和螺旋氣動人工肌肉可以廣泛地應用于各個方向,比如軟體分類機器人、搜索機器人、生物機器人、運動輔助外骨骼、力反饋可穿戴設備等等。
提升人機互動性的柔性機器人
實際上,人造肌肉材料已成為當今研究的前沿和熱門,這與人們對柔性機器人領域越來越多的關注密不可分。
100 年前,捷克斯洛伐克作家卡雷爾·恰佩克在其科幻小說中,根據 Robota(捷克文“勞役、苦工”)和 Robotnik(波蘭文“工人”),創造出“機器人”一詞。100 年后,機器人不再只是僵硬、冰冷的機器,柔性機器人正進入我們的視野,工業柔性機器人和生物柔性機器人是其主要的 2 個分支。
柔性機器人可具備的特性包括材料的柔軟性、優良的環境適應性、超強的安全性,以及良好的人機互動性。正如香港科技大學機器人研究院院長、機械及航空航天工程學系教授王煜在 2018 年世界機器人大會上所說:
相較于剛體材料而言,軟體材料互動性好很多,如果用軟體材料做出新的機器人,可能會開拓出新的應用領域。
不過,想要完美地同時兼具上述幾種特性,還有很多技術上的難題,目前研究人員們也正在尋求一個突破口,比如中國科學院理化技術研究所研究員、清華大學教授劉靜團隊考慮了室溫液態金屬在柔性機器人領域的應用;MIT 研究人員曾用 3D 打印、液壓驅動的方式驅動機器人運動。
雖然現階段柔性機器人領域仍比較“概念化”,但其應用前景廣泛,未來必將會帶來新的變革。
關于作者
論文通訊作者為哈爾濱工業大學航天學院復合材料與結構研究所博士生導師冷勁松教授。
【圖源百度百科】
1992 年起,冷勁松教授開始在哈工大開展智能材料系統和結構的研究,主要研究方向包括智能材料系統和結構系統、光纖傳感器、結構健康監控、復合材料結構設計和工藝技術、可變翼飛行器、結構振動主動控制、光纖通訊和微波光電子器件、微機電系統等等。
另外,冷勁松教授也在 International Journal of Smart & Nano Materials 擔任主編,在 Smart Materials & Structures 和 Journal ofIntelligent Material Systems and Structures 等國際雜志擔任副主編。2006 年入選教育部新世紀優秀人才計劃,2007 年入選長江學者特聘教授,2018 年當選歐洲科學院物理與工程學部外籍院士(Members of the Academia Europaea)。
-
嵌入式
+關注
關注
5150文章
19668瀏覽量
317466 -
機器人
+關注
關注
213文章
29731瀏覽量
212842
發布評論請先 登錄
華沿機器人:以協作機器人技術賦能汽車智能制造新時代

盤點#機器人開發平臺
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
清華大學:軟體機器人柔性傳感技術最新研究進展

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
星海圖發布R1系列仿人形通用機器人新品
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
噴涂機器人的關鍵術語和核心參數介紹
ATA-7030高壓放大器在電致變形柔性致動器表情機器人實驗中的應用

華工科技聯合哈工大實現國內首臺激光智能除草機器人落地
柔性機器人和剛性機器人有什么區別?

柔性電子技術革新與人形機器人的電子皮膚應用前景

人形機器人感知變化的未來

柔性機器人與剛性機器人區別與聯系






 工商網監
工商網監
評論