 輪足復合式機器人的總體結構和控制系統
輪足復合式機器人的總體結構和控制系統
輪足復合式機器人是高科技產品的典型,是人們設置指定的程序通過中控系統實現機器人橫移、越障或爬坡,跨溝、轉彎等多種功能的高科技智能化產品。它可代替人類在某些領域力所不能及的地方實現特定的任務和功能,能在有害環境下代替人類工作,偵查,排險等,因而廣泛應用于機械制造、冶金、電子、輕工和原子能等部門。
本文主要進行了輪足復合式機器人的總體結構設計和控制系統設計。輪足復合式機器人的機械結構由直流電機、編碼器和短臂、長臂、輪子等部分組成,可按預定程序運動,實現橫移、越障、爬坡、跨溝、轉彎等功能。控制系統部分的設計主要是選擇合適的PLC中控系統,設計合理的PLC控制流程圖,通過中控系統調節各個直流電機的轉速來使輪足復合式機器人實現移動,爬坡,拐彎,越障等功能。
關鍵詞:輪足復合式機器人;智能化;控制系統;
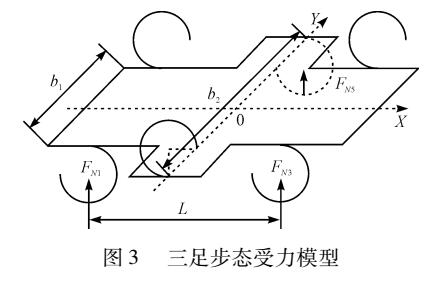
本次設計的輪足復合式機器人采取的方案是:采用鑄鐵剛度好的鑄鐵機架作為主體,通過車輪電機實現機器人的移動,通過程序控制各個車輪電機的轉速實現機器人的轉彎,通過渦輪裝置實現電機的自鎖從而控制機器人的輪足的轉動實現機器人的越障跨溝等等功能,總之,輪足復合式機器人是人們設置指定的程序通過中控系統實現機器人橫移、越障或爬坡,跨溝、轉彎等多種功能。
為了使機器人能夠順利地跨越一定寬度的障礙物,應該將輪足的結構設計成可以越障的結構。
考慮到四連桿機構的設計較為簡單,在這里我們選擇四連桿機構(圖1)作為輪足復合式機器人的越障機構,最主要的一點就是平行四邊形連桿機構更容易控制機構的角速度,這對于機器人的整個的控制來說是最大的優點。
設計平行四邊形連桿機構時,將每一組輪足設計成長臂和短臂連接。并且長臂和短臂在同一平面內轉動,其平面在車身的側面,該機構具有兩個自由度。由于機構具有自鎖的特點,所以當機器人越障時,只需要控制電機的轉停和速度既可,而當機器人需要移動時,控制輪足的電機不讓它轉動而車輪電機轉動就行了。
作為地球上最成功的運動生物,多足昆蟲則以其復雜精妙的肢體結構和簡易靈巧的運動控制策略,輕易地穿越了各種復雜的自然地形,甚至能在光滑的表面上倒立行走。因此,將多足昆蟲的行為學研究成果,融入到輪足復合式機器人的結構設計與控制中,開發具有卓越移動能力的輪足復合式機器人,對于輪足復合式機器人技術的研究與應用具有重要的理論和現實意義。
輪足復合式機器人地形適應能力強,具有冗余肢體,可以在失去若干肢體的情況下繼續執行一定的工作,適合擔當野外偵查、水下搜尋以及太空探測等對自主性、可靠性要求比較高的工作。
-
控制系統
+關注
關注
41文章
6752瀏覽量
111796 -
機器人
+關注
關注
213文章
29477瀏覽量
211534
發布評論請先 登錄
基于FPGA怎么實現三輪全方位移動機器人運動控制系統?
【四足機器人】SOLO技術詳解--(1)介紹(2)平臺和機器人概述【翻譯】精選資料分享
基于RT-Thread+RA6M4的麥輪結構的底盤運動控制系統設計案例
六足機器人的結構和控制系統





 工商網監
工商網監
評論