") 如何實(shí)現(xiàn)自動(dòng)駕駛汽車(chē)漂移
如何實(shí)現(xiàn)自動(dòng)駕駛汽車(chē)漂移
斯坦福大學(xué)加州動(dòng)力設(shè)計(jì)實(shí)驗(yàn)室的工程師們制作了一個(gè)視頻,視頻中一輛德羅寧DMC-12復(fù)古跑車(chē)正在繞著一個(gè)封閉的場(chǎng)地繞著障礙物進(jìn)行熟練的漂移。只不過(guò)這些動(dòng)作都是這輛汽車(chē)自己做出來(lái)的。
《速度與激情》中有很多驚險(xiǎn)的漂移鏡頭,專業(yè)的駕駛員對(duì)汽車(chē)速度位置以及側(cè)滑都有精確的控制,然而這種人類(lèi)引以為豪的駕駛技術(shù)正在被人工智能涉足。近日,據(jù)外媒報(bào)道,斯坦福大學(xué)加州動(dòng)力設(shè)計(jì)實(shí)驗(yàn)室的工程師們制作了一個(gè)視頻,視頻中一輛德羅寧DMC-12復(fù)古跑車(chē)正在繞著一個(gè)封閉的場(chǎng)地繞著障礙物進(jìn)行熟練的漂移。全部的動(dòng)作都是由汽車(chē)自己做出來(lái)的,車(chē)內(nèi)司機(jī)隨時(shí)準(zhǔn)備控制急停按鈕。
自動(dòng)駕駛汽車(chē)漂移
這是Chris Gerdes和他的團(tuán)隊(duì)——博士畢業(yè)生Tushar Goel和Jon Goh共同努力的結(jié)果,展示了他們?cè)谧詣?dòng)駕駛研究方面的一些最新進(jìn)展,也就是教會(huì)一輛自動(dòng)駕駛汽車(chē)玩漂移。這輛車(chē)從外觀上只用GPS天線和控制系統(tǒng)改裝,并沒(méi)有其他多余的傳感器。
在這個(gè)長(zhǎng)達(dá)3分鐘的視頻中,這輛1981年版純電動(dòng)德羅寧DMC-12被命名為“MARTY”,它嫻熟的向觀眾們表演著定圓漂移和八字漂移。
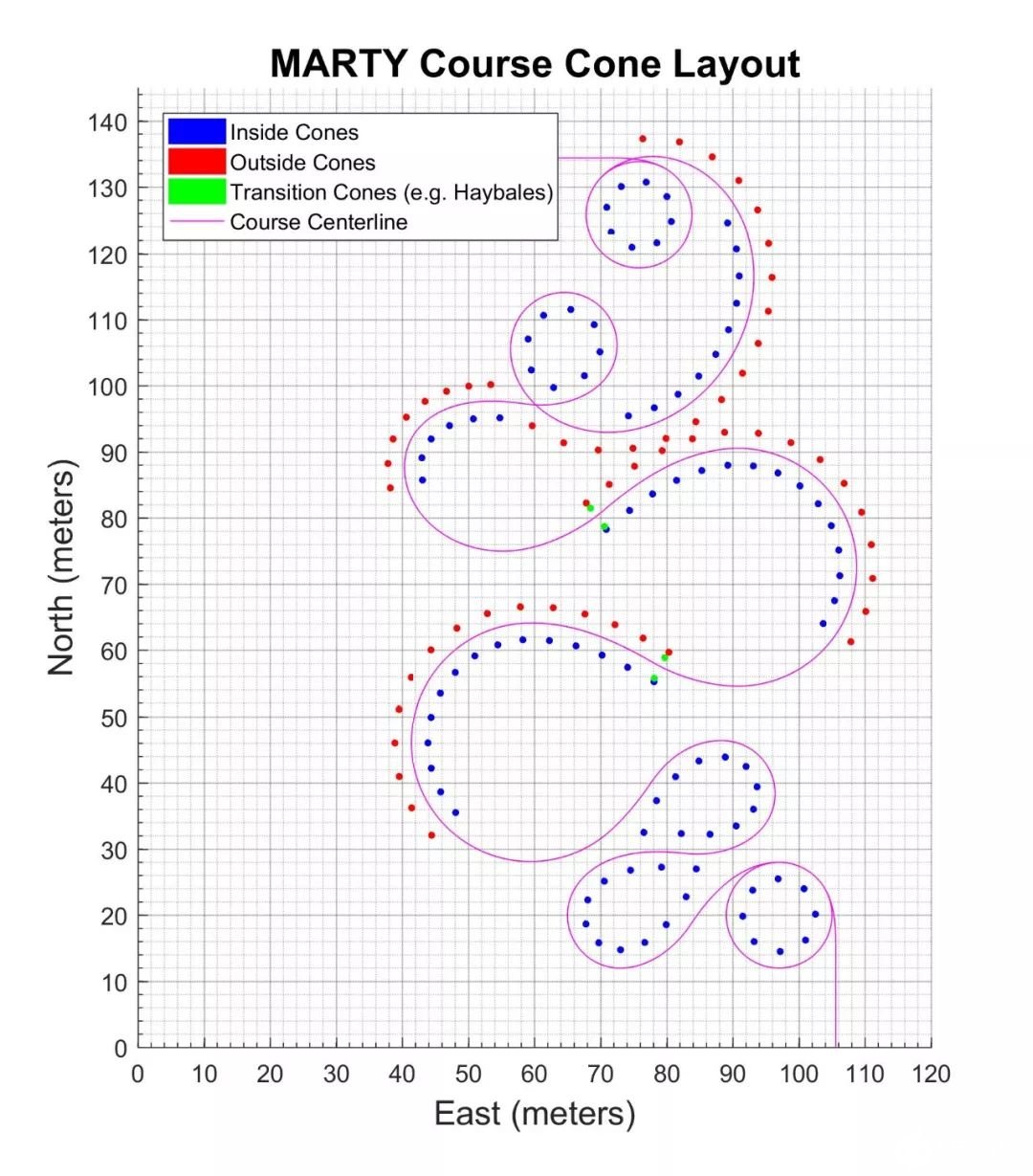
自動(dòng)駕駛漂移路線
實(shí)驗(yàn)室主任、斯坦福汽車(chē)研究中心(Center For Automotive Research)機(jī)械工程首席教授杰德斯(Gerdes)解釋說(shuō):“我們正在努力開(kāi)發(fā)能夠處理緊急狀況或冰雪等路面的自動(dòng)化車(chē)輛。”“我們希望能夠讓汽車(chē)?yán)盟休喬ズ偷孛娴哪Σ烈约八形锢矶桑陉P(guān)鍵時(shí)刻避開(kāi)障礙物。“
他們團(tuán)隊(duì)提出了一種新穎的控制器框架,用于沿路徑自動(dòng)漂移。對(duì)于一般情況,無(wú)需參考附近的平衡點(diǎn)即可得出控制器,這可以得出具有物理洞察力的結(jié)果,即可以使用車(chē)輛速度矢量的旋轉(zhuǎn)速度來(lái)跟蹤路徑,同時(shí)可以使用偏航加速度來(lái)穩(wěn)定側(cè)滑。然后,非線性模型反演與低速輪速控制相結(jié)合,可在廣泛的條件下實(shí)現(xiàn)這些所需的狀態(tài)導(dǎo)數(shù)。
MARTY(1981年DMC DeLorean的改良版)上的實(shí)驗(yàn)表明,可以很好地跟蹤曲率,速度和側(cè)滑變化的路徑。與不帶輪速控制的測(cè)試運(yùn)行進(jìn)行比較,突出了考慮到后飽和輪胎輪速動(dòng)力學(xué)的重要性。
復(fù)雜的漂移動(dòng)作與自動(dòng)駕駛系統(tǒng)結(jié)合起來(lái),有很強(qiáng)的震撼力,它充分考驗(yàn)了自動(dòng)駕駛汽車(chē)穩(wěn)定控制的能力。未來(lái)車(chē)輛在自動(dòng)駕駛方面不僅會(huì)追求安全,也看重產(chǎn)品的個(gè)性化設(shè)計(jì)。或許有一天,當(dāng)人類(lèi)想感受一下漂移的樂(lè)趣時(shí),可以切換到“Marty”模式。
責(zé)任編輯:wv
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14246瀏覽量
169955
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)駕駛安全基石:ODD
《汽車(chē)駕駛自動(dòng)化分級(jí)》會(huì)更適合中國(guó)自動(dòng)駕駛發(fā)展嗎?


劉強(qiáng)東,進(jìn)軍汽車(chē)領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車(chē)# 京東自動(dòng)駕駛快遞車(chē)
NVIDIA Halos自動(dòng)駕駛汽車(chē)安全系統(tǒng)發(fā)布
理想汽車(chē)推出全新自動(dòng)駕駛架構(gòu)
自動(dòng)駕駛的未來(lái) - 了解如何無(wú)縫、可靠地完成駕駛

MEMS技術(shù)在自動(dòng)駕駛汽車(chē)中的應(yīng)用
自動(dòng)駕駛汽車(chē)安全嗎?







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論