") 如何使用Arduino和伺服電機來制作昆蟲機器人
如何使用Arduino和伺服電機來制作昆蟲機器人
步驟1:
在實際復(fù)制項目之前,這里簡要介紹一下所使用的組件-
超聲波傳感器(圖一和二):
傳感器的最主要應(yīng)用是障礙物的測量距離。它可以在任何照明條件下工作,因此可以在夜視傳感器中找到廣闊的空間。在此指導(dǎo)書中,我使用它來檢測障礙物,它具有四個引腳(VCC,Trig,Echo,Gnd),并且在進一步的說明中已示出了連接。最好的例子是在汽車的輔助停車系統(tǒng)中,在該系統(tǒng)中,汽車向警告您的障礙物超過最小距離。
Arduino Uno (圖2,圖2)。 2):這是一個簡單的編程平臺,它從傳感器,開關(guān)和相應(yīng)地控制輸出設(shè)備的許多設(shè)備(例如電動機等)獲取輸入。要對Arduino進行編程,您需要從Arduino主頁安裝Arduino IDE。
伺服電動機(圖3,圖4):伺服電動機與普通的直流電動機完全不同。它主要由四個部分組成:
普通的直流電動機。
位置感應(yīng)設(shè)備。
減少齒輪的單位。
控制電路。
伺服系統(tǒng)具有三線連接:電源,接地和信號。電源必須經(jīng)常使用;伺服器具有自己的驅(qū)動電子裝置,可從電源線汲取電流來驅(qū)動電動機。伺服器的功能是接收來自Arduino的控制信號,該信號表示伺服軸的所需輸出位置,并向其直流電動機供電,直到其軸轉(zhuǎn)到該位置為止。
》! !這些知識足以繼續(xù)進行。因此,讓我們開始構(gòu)建。
步驟2:所需的工具:
以下是構(gòu)建此項目所需的組件。列表很簡單:
雙面膠帶
剝線鉗
鼻子鉗
超聲波傳感器
Arduino uno
電纜扎帶
螺絲擰緊器
電線(用于腿部)
連接線
電池
因此,一旦您準備好所有組件,就可以加速!!!
第3步:構(gòu)造身體:使用伺服器
因此,機器人的底盤的設(shè)計取決于所用伺服電機的類型(小,大),但是我使用的是較小的。如果您使用的是更大的設(shè)備,并且兩者都以相同的原理運行,那沒關(guān)系。
因此,第一步是將雙面膠帶粘貼到第一臺伺服電機的背面。然后將第二臺伺服電機粘貼到第一臺伺服電機上,第二個電動機的電動機軸應(yīng)朝下 。
步驟4:構(gòu)造車身:使用導(dǎo)線
前腿:前三張圖片展示了使用尖嘴鉗形成前腿的過程。呈V形,如圖所示。您以后無論如何都必須將它們彎曲為正確的形狀。彎曲的質(zhì)量取決于所使用的電線。因此,請使其彎曲得盡可能靠近鉗子邊緣
稀有腿:接下來的六張圖片顯示了稀有腿的形成。將電線放入伺服喇叭中提供的孔中,然后使用鉗子如圖所示彎曲電線。如果您對此步驟有任何疑問?請在下面發(fā)表評論,我將很樂意為您提供幫助。
現(xiàn)在,借助螺絲刀將支腳固定到伺服電機上。查看圖片以便于理解
步驟5:連接
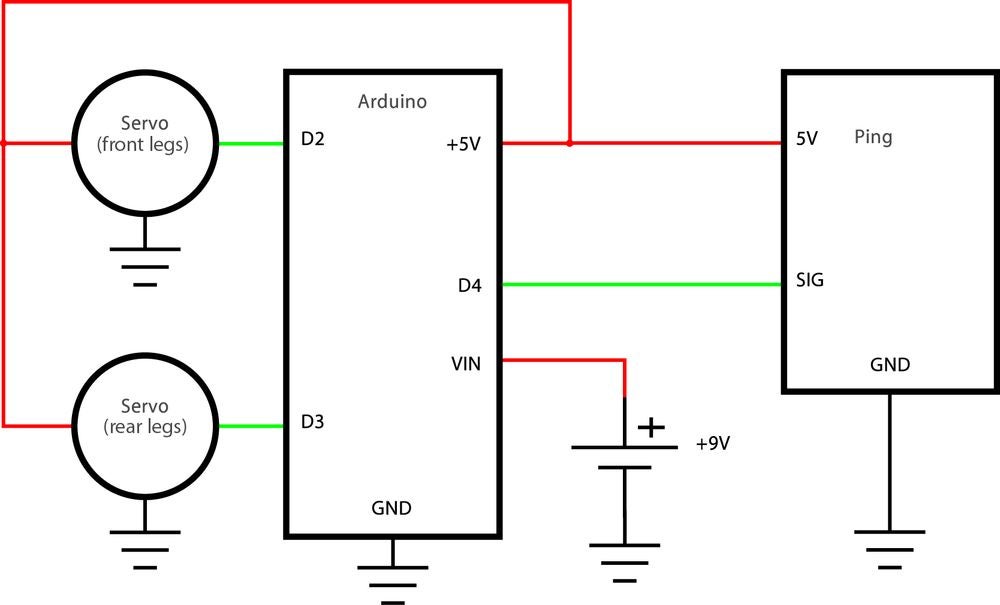
因此連接如下:-
伺服器的深色線(棕線)連接到Arduino的5V引腳。
伺服器的中色線(紅線)連接到Arduino的接地引腳。
伺服器的淺色線(黃線)連接到Arduino的數(shù)字引腳上
超聲傳感器的連接如下:-
VCC引腳同時提供給Arduino的數(shù)字引腳和5V引腳
接地引腳提供給Arduino的接地引腳
所以現(xiàn)在剩下完成項目的唯一階段就是編碼。
步驟6:編碼:
完成后那個工程。將附件中的代碼上傳到您的arduino,并與您的新機器人一起使用。
-
機器人
+關(guān)注
關(guān)注
213文章
29508瀏覽量
211634 -
伺服電機
+關(guān)注
關(guān)注
87文章
2103瀏覽量
59184 -
Arduino
+關(guān)注
關(guān)注
189文章
6492瀏覽量
190153
發(fā)布評論請先 登錄
盤點#機器人開發(fā)平臺
主要人形機器人廠商的電機驅(qū)動與傳感系統(tǒng)對比
國民技術(shù)N32H系列MCU在伺服與機器人領(lǐng)域的應(yīng)用
其利天下技術(shù)·伺服電機在機器人技術(shù)中的應(yīng)用

伺服電動缸在人形機器人中的應(yīng)用
開源項目!能夠精確地行走、跳舞和執(zhí)行復(fù)雜動作的機器人—Tillu
伺服系統(tǒng)在機器人中的作用 伺服系統(tǒng)與傳統(tǒng)電機對比
伺服電機在機器人中的應(yīng)用有哪些
【開源項目】你準備好DIY一款功能強大的機器人了嗎?
伺服控制機器人的控制方式有哪些
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
Al大模型機器人
AMD Kria? KR 260套件+ROS 2快速開發(fā)機器人解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論