 如何制作智能太陽能路燈
如何制作智能太陽能路燈

步驟1:太陽能智能路燈功能概述
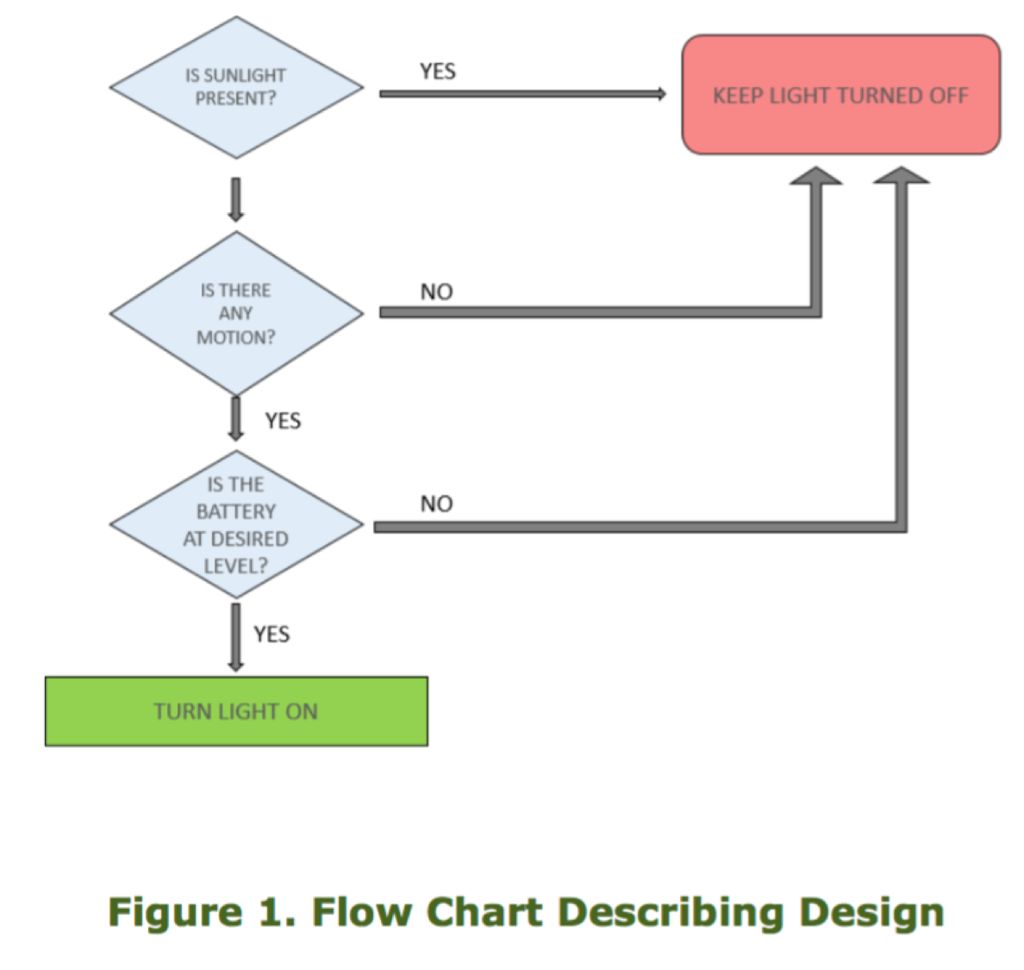
對于此項目,使用了Silego的GreenPAK可配置混合信號集成電路(CMIC)。芯片中編程的三個關鍵功能將是:
1-運動感測
2-白天感測
3-電池電量感測
運動感應
為了節省功率,僅在檢測到任何運動物體時才允許打開燈。為此,已經設計了無源紅外(PIR)傳感器。該PIR Motion傳感器具有單個輸出引腳以及VCC和GND引腳。 PIR傳感器基本上可以檢測紅外輻射的水平。一旦檢測到輻射水平發生變化,它就會發出通知該變化的信號。該傳感器是用于運動檢測的最常用傳感器之一。 (見圖2)
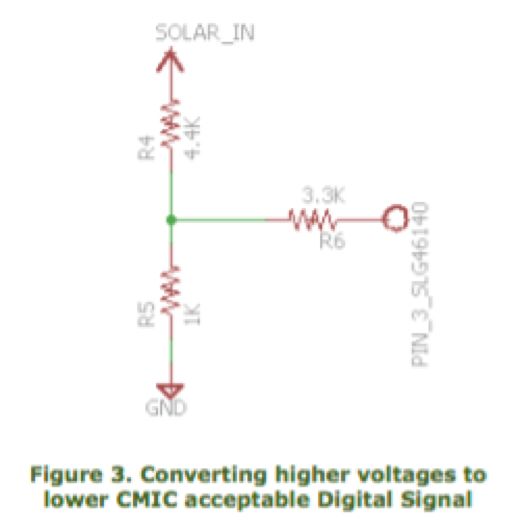
環境日光感應
太陽能電池板本身用于感應環境光。太陽能電池板在完全陽光直射的情況下提供全部輸出,而在沒有光照的情況下提供零輸出。然后可以將這些條件轉換為CMIC的數字輸入引腳以產生適當的電平。通過使用簡單的分壓器電路,可以將太陽能電池板產生的18伏電壓轉換為3.3V信號,該信號代表SLG46140V CMIC的高電平邏輯輸入。
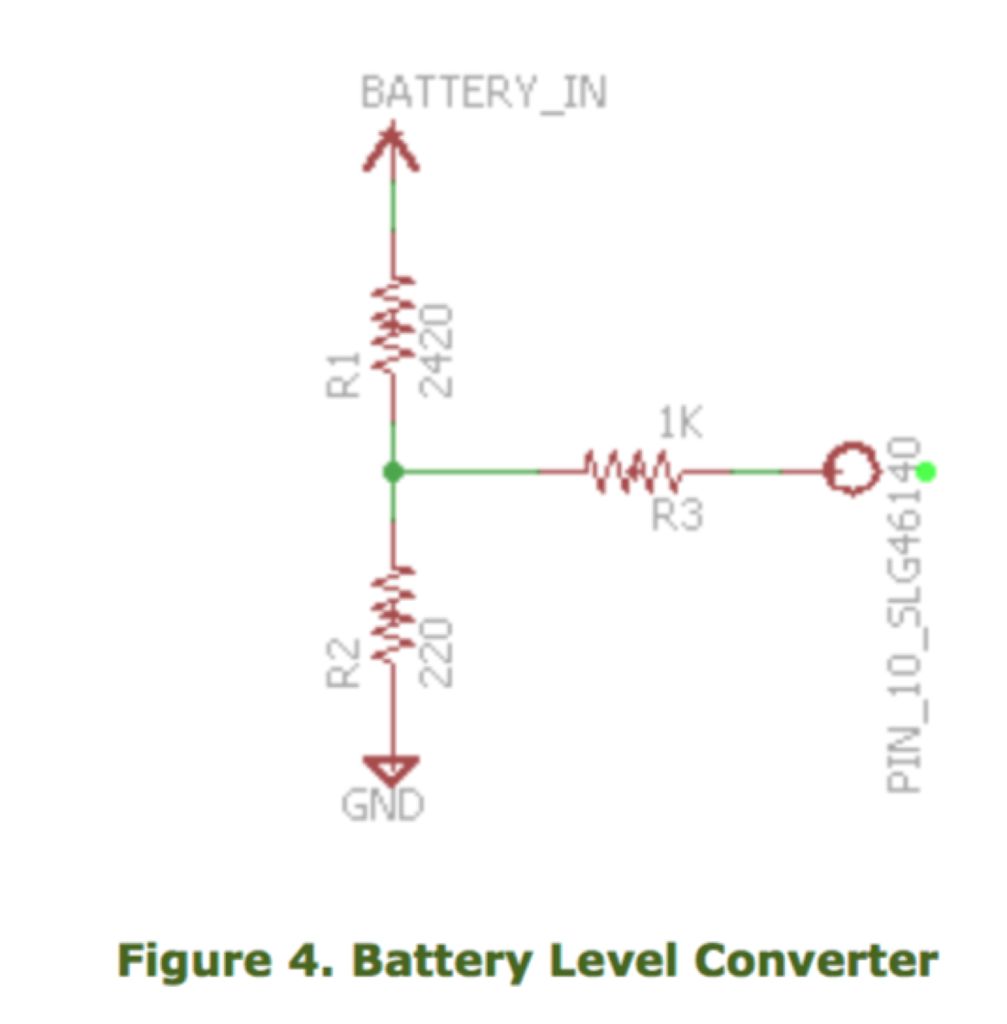
電池電量監測和充電
電池電量監測也是該系統的重要方面。在此設計中,使用了密封鉛酸(SLA)電池。 SLA電池非常通用,可靠且具有成本效益。與使用其他化學物質的電池相比,SLA電池的充電方法要簡單得多。 SLA電池需要以等于0.1C的恒定電流充電(此處C =充滿電后的電池容量,安培小時),電壓應比額定輸出電壓高1.5伏至2伏。因此,充電電路也可以更簡單。重要的是要注意,滿容量的12v SLA電池將提供約13.2伏的開路電壓。放電后,電池的開路電壓略低于12v。但是,由于我們的CMIC無法測量如此高的電壓,因此需要將其轉換為可接受的范圍。同樣,使用一個簡單的分壓器將電壓分壓到大約800mv以表示已放電的電池,將大約1150mv表示為已完全充電的電池。然后將這些電壓電平饋入SLG46140V CMIC并使用其模擬比較器進行比較。正如我們將在下一節中看到的那樣,這些比較器在整個項目實現中起著至關重要的作用。
步驟2:對GreenPAK IC進行編程
通過下載GreenPAK軟件以查看預制的智能路燈設計文件,可以輕松地對GreenPAK IC進行編程,以控制智能太陽能路燈。將GreenPAK開發套件連接到計算機,將未編程的SLG46140V GreenPAK IC插入開發套件插槽并點擊程序。該IC將被自動編程為可控制智能太陽能路燈的IC。
對該IC進行編程后,您可以將其保留在開發套件插座中,以便更輕松地訪問引腳或批量生產時,您可以創建一個很小的PCB板來訪問芯片。
現在將GreenPAK IC編程為控制智能路燈,您可以跳到步驟4。
如果您想更好地了解和修改智能路的內部電路,燈光設計文件,第3步將概述GreenPAK智能街道設計文件的編程方式。
第3步:GreenPAK設計細節
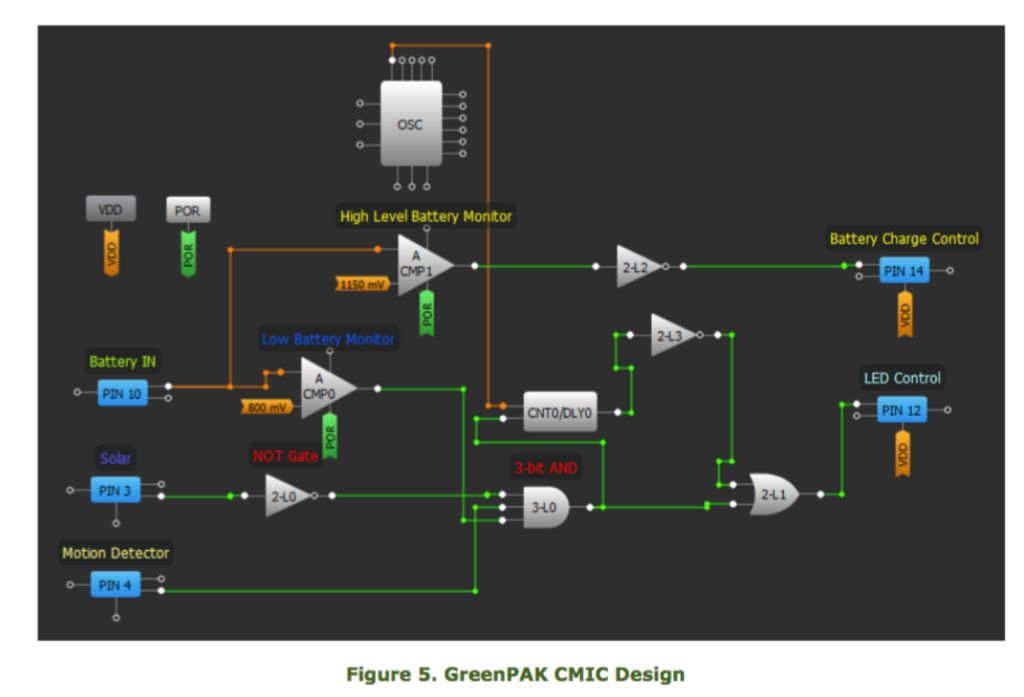
實現此設計的GreenPAK原理圖如圖5所示。
?使用的引腳說明:
-PIN3:數字輸入
-PIN4:用于檢測運動或物體存在的數字輸入引腳。
-PIN10:用于監視電池電量的模擬輸入引腳。
-PIN12:具有1xPush-Pull輸出模式的數字輸出,用于控制LED。
-PIN14:具有1xPush-Pull輸出模式的數字輸出,用于控制電荷流入電池。
?3 –位與門:
此設計中的3位與門可確保輕巧僅當滿足所有條件時t才打開。諸如“附近運動檢測”,“周圍陽光存在”和“所需電池電量”等條件是確定“與”門輸出的三個位。
?電池電量監視:
兩個模擬比較器(ACMP0和ACMP1)監視電池電壓。如前所述,已使用800mV和1150mV的兩個電壓電平來確定電池的狀態。如果測得的電池電壓降至800mV或更小,比較器(ACMP0)的輸出為零。此輸出被饋入三輸入與門,該三輸入與門又提供零輸出,并在檢測到電池電壓低時關閉燈。
在充電和充電期間測量高電壓。用作CMIC引腳10輸入的分壓后的電壓饋入比較器(ACMP1)。一旦電壓電平達到或超過反相輸入上設置的參考電壓(在這種情況下為1150mV),比較器就會輸出高電平。達到所需水平后,我們需要切斷電池充電,因此需要低電平輸出,并為此目的使用了一個簡單的逆變器。
??來自太陽能電池的輸入:
如前所述,當不存在環境光時,太陽能電池將輸出零/數字低信號。由于沒有陽光是打開路燈的條件之一,因此我們需要將其轉換為數字高電平,以便我們的與門也輸出高電平。因此,這里也為此目的使用了一個逆變器。
?使用計數器作為延長輸出周期的手段:在上述設計中,還使用了一個計數器(CNT0/DLY0)來產生一定量CMIC的PIN12上的信號關閉延遲時間。這產生了避免快速輸出切換的期望延遲。 (見圖6)
使用計數器作為延長輸出周期的方法:
在上述設計中,Counter(CNT0/DLY0)也是用于在關閉CMIC的PIN12信號時產生一定程度的延遲。這產生了避免快速輸出切換的期望延遲。 (見圖6)
步驟4:外部電路說明
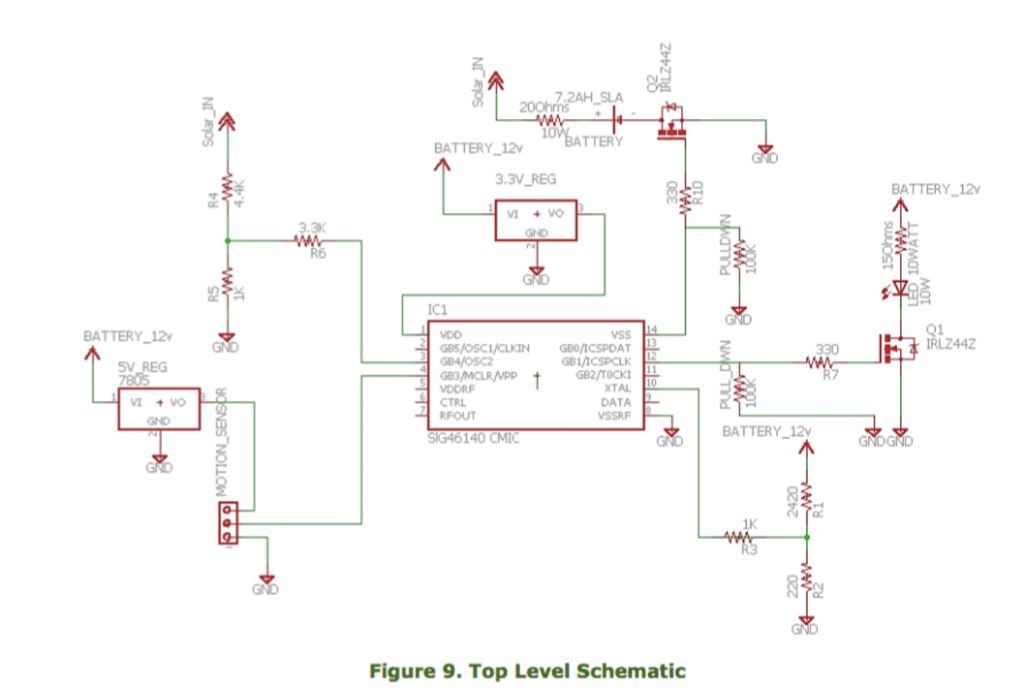
本節介紹如何使用外部電路來驅動更大的負載,例如10W LED燈和電池充電。為了創建最高效,最節能的電路,已使用MOSFET來代替普通的BJT。
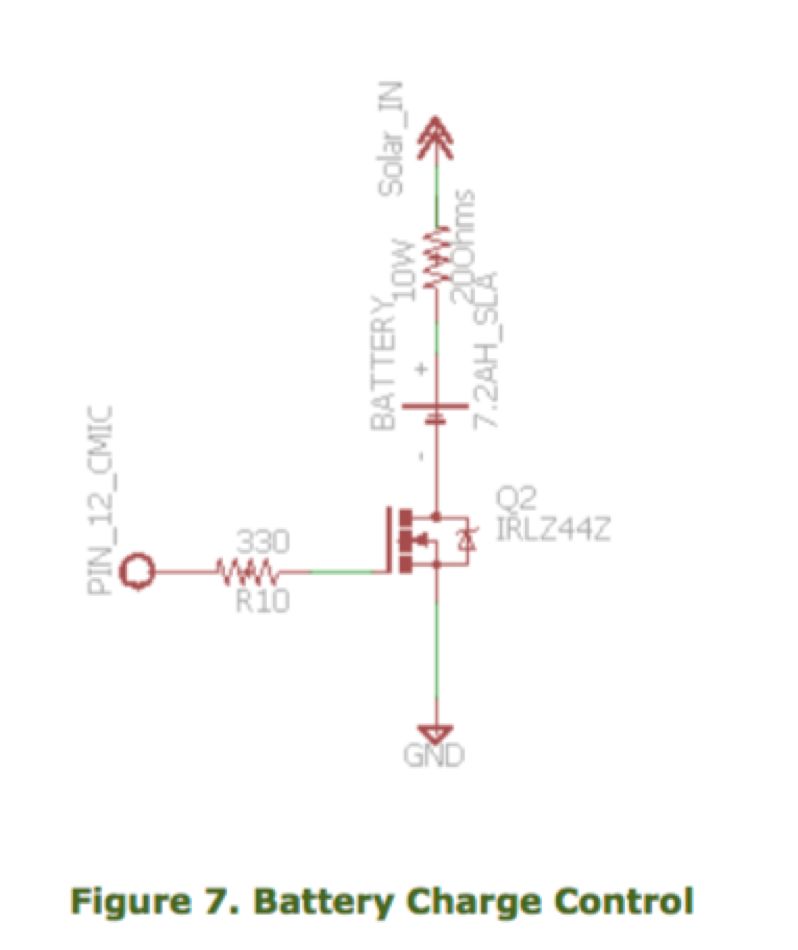
?電池充電控制:
IRLZ44N HEXFET功率MOSFET(類似MOSFET,例如(也可以使用FQP30N06L),它是一種N溝道增強型MOSFET。
該MOSFET專為在柵極電壓電平(3V和5V)下工作而設計,可以通過小型控制器輕松產生該電壓
MOSFET的數據表描述了漏極電流ID約為1安培時,門極至源極的門極電壓(Vgs(th))約為3伏。根據引腳12的電氣規格表(類似于PIN14),我們的小型CMIC可以輕松實現這一點。
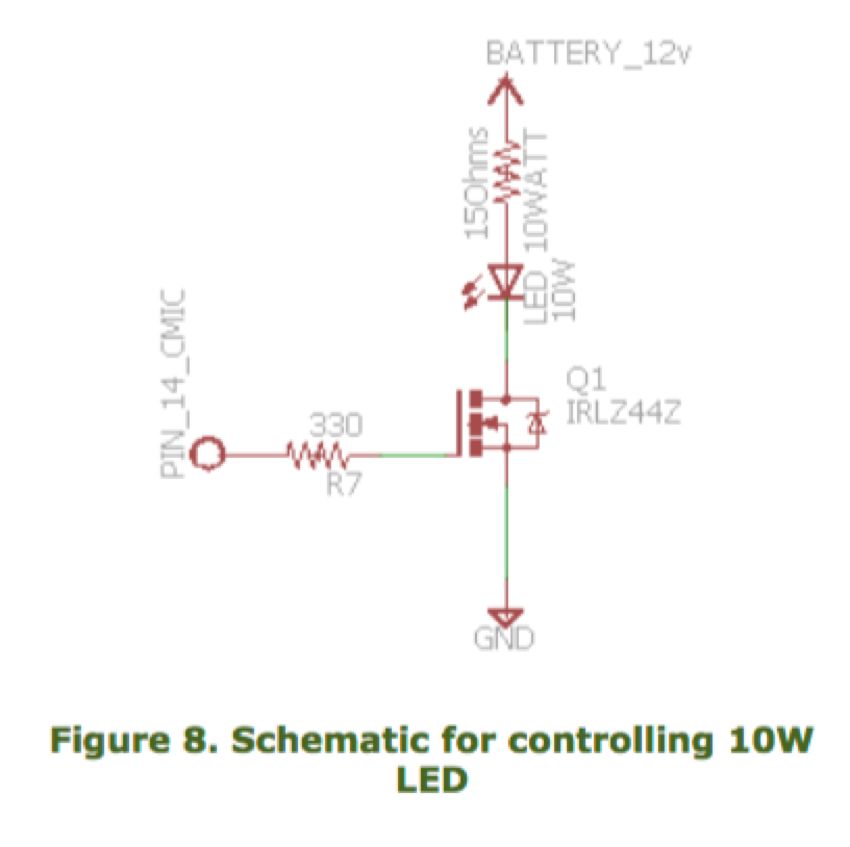
?LED燈控制:
與充電控制電路類似,我們項目的這一部分還使用IRLZ44N HEXFET MOSFET來切換10瓦LED,這是主要的照明光源。由于我們想用12V電池控制10Watt LED,因此我們需要能夠提供大約10V的電流。 0.8安培該電路如圖8所示。
這些電路可以連接到面包板上,也可以通過死蟲電路進行布線。
第5步:結論
本指南演示了以SLG46140V GreenPAK CMIC作為主要控制元件的智能路燈的設計。事實證明,這種小型IC具有執行手頭任務的巨大能力,同時還可以最大程度地降低功耗。提供適當的設計工具也非常有效地幫助了該項目的實現。還可以通過引入其他電路來增強該項目,例如檢測太陽能電池板上的灰塵,或者使用外部超馳開關來鎖定LED輸出。
-
太陽能路燈
+關注
關注
4文章
95瀏覽量
25611
發布評論請先 登錄



風光互補太陽能路燈桿硬件組成全解析:科技與匠心的深度融合
太陽能高桿路燈:照亮未來的新光
太陽能儲能路燈桿:點亮綠色未來的新篇章
風光互補太陽能路燈:點亮綠色未來之路
太陽能發電與傳統能源比較
太陽能逆變器技術面臨的挑戰

太陽能模擬器:太陽能研究與應用的得力助手







 工商網監
工商網監
評論