 怎樣在沒有微控制器的情況下驅動步進電機
怎樣在沒有微控制器的情況下驅動步進電機
步驟1:零件列表
該項目使用的零件是
面包板
步進電機28byj-48
達靈頓晶體管陣列ULN2003板(x113647)
74HC595移位寄存器
74HC393二進制紋波計數器
DS1809-100 Dallastat數字電位計
74HC241 o tal緩沖區
3個觸覺按鈕
3×10kΩ電阻
2×0.1μF陶瓷電容器
1×0.01μF陶瓷電容器
連接線
5V電源
步驟2:主要部件
74HC595移位寄存器
通過重復給UNL2003板的四個輸入引腳以下順序來移動電動機:
1100- 0110-0011-1001
這將以全步模式驅動電動機。圖案1100反復右移。這建議使用移位寄存器。移位寄存器的工作方式是,在每個時鐘周期,寄存器中的位向右移動一位,用當時輸入引腳的值替換最左邊的位。因此,它應該先饋入兩個時鐘周期1,然后饋入兩個時鐘周期0,以生成用于電機潛水的模式。
要生成時鐘信號,需要一個振蕩器,該振蕩器產生一個穩定的序列脈沖最好是干凈的方波。這將構成信號到電機的移動模式的基礎。
為生成“兩個周期為1,然后兩個周期為0”,使用了觸發器。
我有一個74HC595移位寄存器。這是一種非常流行的芯片,在許多Instructables和Youtube視頻中都有介紹。
數據表可以在http://www.ti.com/lit/ds/symlink/sn74hc595.pdf上找到。
一個很好的指令是由bweaver6刪除的74HC595-Shift-Register-。
74HC595移位寄存器的工作原理是,在每個時鐘周期,其8位寄存器中的數據都會右移。 ,然后將輸入引腳的值移到最左側。因此,應該給它提供兩個時鐘周期1,然后再給兩個時鐘周期0。
數據在時鐘脈沖的上升沿移動。 Henc觸發器應在時鐘的下降沿觸發,因此74HC595在時鐘的上升沿將具有穩定的數據輸入。
74HC595 in可以這樣接線:
Pin 8 (GND) -》 GND
Pin 16 (VCC) -》 5V
Pin 14 (SER) -》 Data in
Pin 12 (RCLK) -》 Clock input
Pin 11 (SRCLK) -》 Clock input
Pin 13 (OE) -》 GND
Pin 10 (SRCRL) -》 5V
Pins 15, and 1-3 will output the pattern to drive the motor.
連接RCLK和SRCLK可確保芯片數據寄存器始終與輸出寄存器同步。將引腳13接地將使輸出寄存器(Q0-Q7)的內容立即可見。
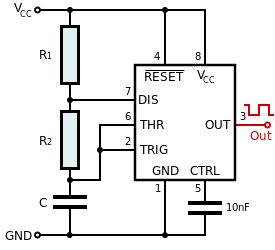
555計時器
要生成時鐘脈沖,555計時器芯片可以使用。這也是一種非常流行的芯片,比移位寄存器有更多的描述和討論。 Wikipedia在https://en.wikipedia.org/wiki/555_timer_IC上有一篇不錯的文章。
數據表在這里:http://www.ti.com/lit/ds/symlink/ne555 .pdf
除其他事項外,該芯片還可以產生方波時鐘脈沖。外部電阻器和電容器用于控制頻率和占空比(接通時)。
當設置為重復生成脈沖時,555芯片被稱為處于不穩定模式。可以通過如上圖所示進行接線來完成。 (圖片由jjbeard [公共領域],通過Wikimedia Commons):
Pin 1 -》 GND
Pin 2 -》 R1 (10k?) -》 Pin 7
Pin 2 -》 Pin 6
Pin 3 is the output
Pin 4 (reset) -》 5V
Pin 5 -》 0.01μF -》 GND
Pin 6 -》 0.1μF -》 GND
Pin 7 -》 R2 (10k?) -》 5V
Pin 8 -》 5V
引腳3的輸出將連接到74HC595移位的輸入時鐘引腳(引腳11和12)
輸出信號的頻率(以及步進電機的速度)由電阻器R1和R2的值以及電容器C的值確定。
循環時間T將為ln(2)C(R1 + 2 R2)或大約0.7 C(R1 + 2 R2)。
頻率為1/T。
占空比,即信號為高的周期時間的一部分,是
(R1 + R2)/(R1 + 2R2)。
占空比對于
對于R1和R2,我都使用10kΩ,C = 0.1μF。
這給出了大約480Hz的頻率,并且接近最大頻率,我發現
要從74HC595產生1100移位的重復模式,應將引腳14(SER)保持高電平兩個時鐘周期,然后保持低電平兩個周期。也就是說,引腳應以時鐘頻率的一半振蕩。
74HC393雙二進制紋波計數器
74HC393以二進制計數,這也意味著它可用于將脈沖頻率除以2的冪,
其數據表在此處:http://www.ti.com/lit/ds/symlink/sn74hc393.pdf
74HC393是雙通道的,每側都有一個4位計數器。
在時鐘脈沖的下降沿,第一個輸出引腳打開和關閉。因此,輸出引腳一將以輸入時鐘頻率的一半振蕩。在輸出引腳1的下降沿,輸出引腳2開啟和關閉。對于所有四個輸出引腳,依此類推。每當引腳n關閉時,引腳n + 1就會切換。
引腳n + 1的變化頻率是引腳n的一半。這是二進制計數。在再次從零開始之前,計數器可以計數到15(所有四個位為1)。如果將計數器1的最后一個輸出引腳作為時鐘連接到計數器2,則它的計數可能為255(8位)。
要創建頻率為輸入時鐘頻率一半的脈沖,只能輸出需要引腳1。也就是說,僅從零開始計數。
因此,如果通過555的時鐘脈沖進行計數,則代表位2的74HC393計數器上的引腳將以頻率的一半振蕩。時鐘。因此,可以將其連接到74HC595移位寄存器的SER引腳,以生成所需的模式。
74HC393二進制計數器的接線應為:
Pin 1 (1CLK) -》 74HC595 Pin 11, 12 and 555 Pin 3
Pin 2 (1CLR) -》 GND
Pin 4 (1QB) -》 74HC595 Pin 14
Pin 7 (GND) -》 GND
Pin 14 (VCC) -》 5V
Pin 13 (2CLK) -》 GND (not used)
Pin 12 (2CLR) -》 5V (not used)
第3步:運行
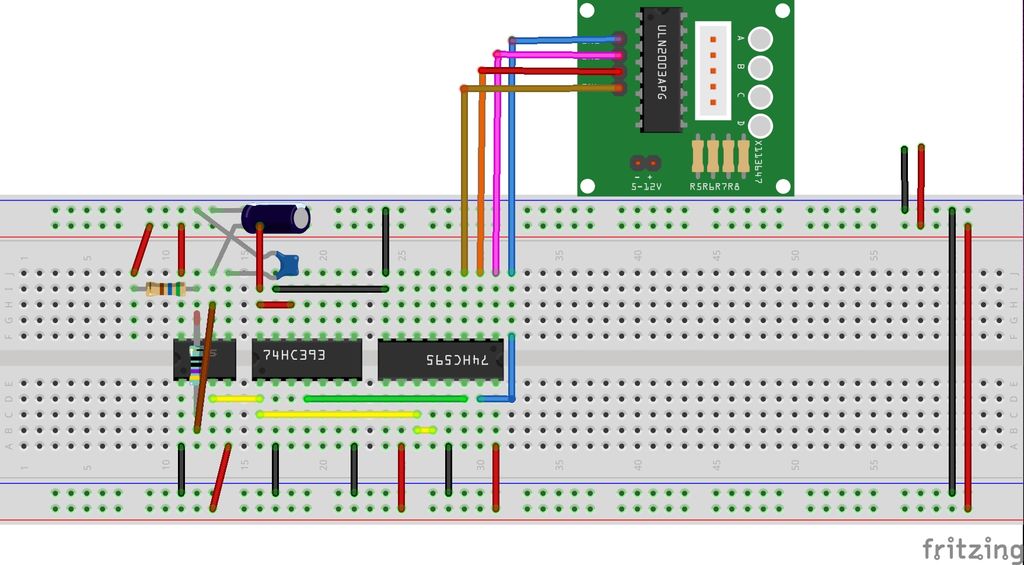
如果74HC595的引腳0-3,我們現在可以使電動機運行分別連接到ULN2003板的1-4引腳。
現在,將555定時器的引腳6上的0.1μF電容器替換為10μF。這將使時鐘周期延長一百倍,并且人們將能夠看到正在發生的事情。
ULN2003板上的LED可用于此目的。從ULN2003板上拔下電機插頭。將電路板的引腳1至4連接到74HC595的輸出QA-QD(引腳7、9、10和11)。將ULN2003板的-和+連接到地面和5V。如果打開電源,則應該在LED上看到所需的圖案。
如果要查看74HC393二進制計數器中發生了什么,請改為連接到該計數器的3-6引腳。
如果圖案正確,請關閉電源,再次用0.1μF的電容更換電容器,將ULN2003板的輸入引腳1-4連接至74HC595的輸出引腳QA-QD,然后將其插入
再次打開電動機。
第4步:速度控制
步進電機的速度由555定時器的輸出頻率控制。這又由電阻器R1和R2以及與其連接的電容器C1的值決定。通過將一個100kΩ的電位計與R2串聯連接,頻率可以在480Hz至63Hz之間。步驟pr。電機的第二個頻率將是555定時器頻率的一半。
我使用了DS1809-100數字電位器,該數字電位器用于按鈕。將引腳2(UC)和引腳7(DC)連接到5V的按鈕使RH(引腳1)或RL(引腳4)端子與抽頭引腳6(RW)之間的電阻增大/減小。按住按鈕一秒鐘以上,按鈕會自動重復。
數據表可以在這里找到:https://datasheets.maximintegrated.com/zh/ds/DS180.。.
布線如下:
Pin 1 (RH) unused
Pin 2 (UC) -》 tactile button 1
Pin 3 (STR) -》 GND
Pin 4 (RL) -》 555 Pin 2
Pin 5 -》 GND
Pin 6 (RW) -》 10k? -》 555 pin 7
Pin 7 (DC) -》 tactile button 2
Pin 8 -》 5V
觸覺按鈕1的布線》 Pin 1/2 -》 DS1809 Pin 2
Pin 3/4 -》 5V
觸覺按鈕2的布線:
Pin 1/2 -》 DS1809 Pin 7
Pin 3/4 -》 5V
現在,可以調節速度了。
步驟5:啟動/停止
要啟動和停止步進電機,可以使用555定時器的引腳4(復位引腳)。如果將其拉低,則引腳3將沒有輸出脈沖。
將使用觸覺按鈕來切換啟動和停止。按下按鈕一次,應啟動電動機,再次按下按鈕,應使其停止。為了獲得這種行為,需要一個觸發器。但是也可以使用已經存在的74HC393。 74HC393由兩部分組成,只有一半用作時鐘脈沖的分頻器。
由于二進制計數器實際上只是串聯的一組觸發器,因此可以使用另一部分的第一個觸發器。通過連接觸覺按鈕,使得按下按鈕時引腳13(2CLK)為低電平,否則為高電平,引腳12將在每個低電平上切換。將針腳12連接到555的針腳4,將啟動和停止其輸出,并因此停止電動機。
觸覺按鈕有些棘手,因為它們是機械按鈕。它們可能會“反彈”,也就是說,它們可能在每次按下時發送多個信號。在按鈕上方連接一個0.1 μF電容器有助于避免這種情況。
因此,增加了一個觸覺按鈕(添加了按鈕3,并且更改了與555引腳4的連接。
按鈕的接線:
Pin 1/2 -》 10k? -》 5V
Pin 1/2 -》 0.1μF -》 Pin 3/4
Pin 3/4 -》 74HC393 Pin 13 (2CLK)
對555進行了以下更改:
Pin 4 (Reset) -》 74HC393 Pin 11 (2QA)
按鈕3現在應該用作啟動/停止開關。
請注意,以這種方式停止的電動機仍會消耗功率。
步驟6:方向控制
要控制電動機的方向,需要另一個按鈕,然后是另一個觸發器,但是,我將通過使用74HC393的下一個觸發器,在開/關觸發器之后作弊,然后
方向針(Pin 2QA)變為低電平時,下一個引腳(Pin 2QB)被切換,因此反復按下按鈕將導致
OFF-ON FORWARDS -OFF-向后打開-OFF-向后打開等
要使電動機向后運行,應反轉送入ULN2003的圖形,這可以雙向執行。我移位寄存器,但我沒有。 74HC595不是雙向的。
但是,我發現我可以使用74HC241八進制緩沖區。該緩沖器有兩個4位部分,帶有獨立的OE(輸出使能)引腳。第一個OE引腳控制前四個輸出引腳,第二個OE控制最后四個輸出引腳。當OE接通時,輸出引腳與相應的輸入引腳具有相同的值,而當OE斷開時,輸出引腳將處于高阻抗狀態,就像未連接時一樣。此外,OE引腳之一為低電平有效,另一引腳為高電平有效,因此,將它們連接在一起時,此時只有一半的緩沖器將處于活動狀態。
因此,對于相同的輸入,緩沖器的一半可以向前驅動電動機,而另一半可以向后驅動電動機。哪一半處于活動狀態,取決于OE引腳的值。
有關74HC241的數據表,請訪問http://www.ti.com/lit/ds/symlink/sn54hc241.pdf。
接線可能是這樣的:
Pin 1 (1OE) -》 74HC293 Pin 10 (2QB)
Pin 2 (1A1) -》 74HC595 Pin 15
Pin 3 (1Y4) -》 ULN2003 Pin 1
Pin 4 (1A2) -》 74HC595 Pin 1
Pin 5 (1Y3) -》 ULN2003 Pin 2
Pin 6 (1A3) -》 74HC595 Pin 2
Pin 7 (1Y2) -》 ULN2003 Pin 3
Pin 8 (1A4) -》 74HC595 Pin 3
Pin 9 (1Y1) -》 ULN2003 Pin 4
Pin 10 (GND) -》 Ground
Pin 11 (2A1) -》 Pin 2 (1A1)
Pin 12 (1Y4) -》 Pin 9 (2Y1)
Pin 13 (2A2) -》 Pin 4 (1A2)
Pin 14 (1Y3) -》 Pin 7 (2Y2)
Pin 15 (2A3) -》 Pin 6 (1A3)
Pin 16 (1Y2) -》 Pin 5 (2Y3)
Pin 17 (2A3) -》 Pin 8 (1A4)
Pin 18 (1Y2) -》 Pin 3 (2Y4)
Pin 19 (2OE) -》 Pin 1 (1OE)
Pin 20 (VCC) -》 5V
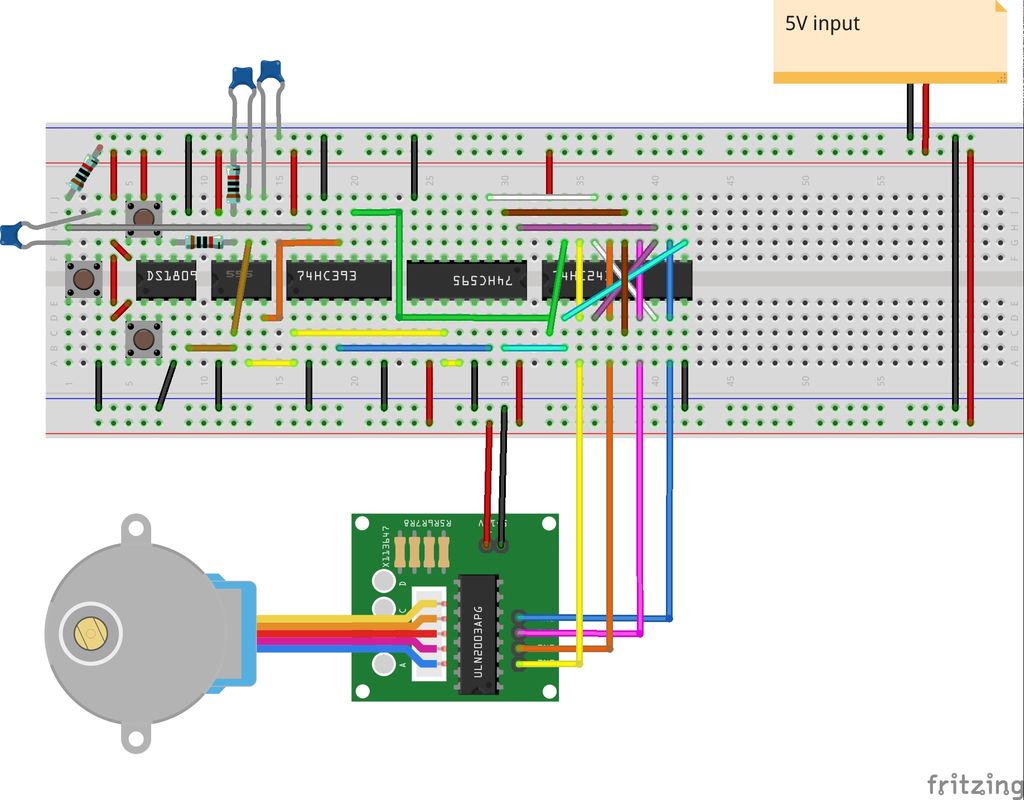
現在,只需用5V上電即可完成接線。
請確保電源可以提供足夠的電流來驅動電動機和電路。
步驟7:結論
可以控制步進電動機沒有微控制器。
這里使用的IC是我以前購買的。
為生成脈沖,555定時器芯片是很好的選擇,但是存在幾種替代方法,例如,
對于速度控制,可以使用任何電位計,而不僅僅是數字電位計。如果您使用的是10kΩ的電位計,而不是100kΩ,則可以用1KΩ替換10kΩ的電阻,而將0.1 μF的電容替換為1μF的電容(將所有電阻相除并乘以相同的電容以保持時序)。
使用雙向移位寄存器,例如
對于按鈕控制,可以將74HC393替換為觸發器,例如74HC73。 555也可以連接為撥動開關。
-
微控制器
+關注
關注
48文章
7904瀏覽量
153688 -
步進電機
+關注
關注
152文章
3156瀏覽量
149123
發布評論請先 登錄








 工商網監
工商網監
評論