") 怎樣用Android手機(jī)制作多功能智能機(jī)器人
怎樣用Android手機(jī)制作多功能智能機(jī)器人
步驟1:零件

硬件
1。支持安裝了Android KitKat或更高版本的OTG的Android手機(jī)。大多數(shù)現(xiàn)代電話都支持OTG。 (我在這里使用了UMI Emax,因?yàn)樗δ軓?qiáng)大且便宜!)
2。基于Arduino Uno的機(jī)器人平臺(tái)。我建議使用MakeBlock Starter Robot Kit(可以使用IR或藍(lán)牙版本)。
3。儀表板手機(jī)支架的頂部(我使用了BlackFox Digidock CR-3104)
4。 OTG電纜(在ebay或Amazon上很容易找到)
5。標(biāo)準(zhǔn)的微型USB電纜(最好是一根很短的電纜,如果可以找到,最好是適配器模塊)
6。磁性潛望鏡鏡頭(在Amazon或ebay上很容易找到)
軟件
1。 Arduino IDE
2。 DroidScript IDE
第2步:制作機(jī)器人底座

1。首先根據(jù)MakeBlock指令構(gòu)建標(biāo)準(zhǔn)的跟蹤機(jī)器人模型。
2。檢查是否可以使用隨附的紅外控制器驅(qū)動(dòng)機(jī)器人。
步驟3:重新配置硬件

1。取下電池盒,并使用兩個(gè)扎帶將其綁在機(jī)器人下方。
2。取下超聲波傳感器及其金屬板,然后將其重新安裝在所示的較低位置。
3。將超聲波測(cè)距傳感器連接到控制板上的端口4。
步驟4:連接電話架
-使用扎線帶,雙面膠帶或維可牢尼龍搭扣墊將手機(jī)支架固定在機(jī)器人的頂部。
-將手機(jī)放在支架中,然后將潛望鏡鏡頭安裝到手機(jī)的相機(jī)上。
-將OTG電纜和micro USB電纜連接在一起,然后將它們連接到手機(jī)和機(jī)器人的控制板之間。確保OTG電纜插入手機(jī)而不是反過(guò)來(lái),否則它將不起作用。
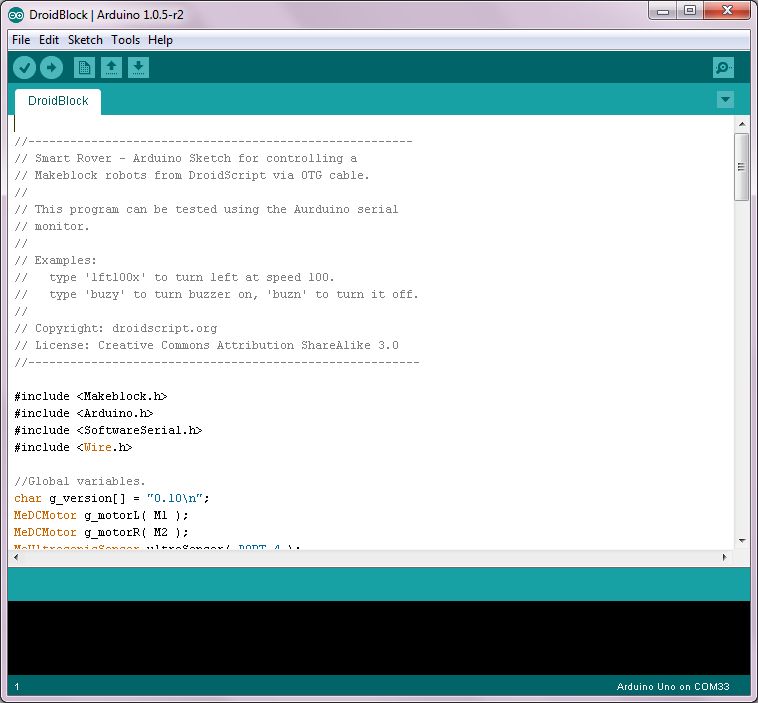
步驟5:對(duì)MakeBlock Orion(Arduino Uno)開(kāi)發(fā)板進(jìn)行編程
-安裝Arduino IDE
-安裝MakeBlock Arduino庫(kù):
-使用標(biāo)準(zhǔn)將機(jī)器人控制板連接到計(jì)算機(jī)微型USB電纜。
-從“工具”菜單中選擇“ Arduino Uno”作為板類(lèi)型。
-創(chuàng)建以下新草圖(即程序):-
//-------------------------------------------------------
// Smart Rover - Arduino Sketch for controlling a
// Makeblock robots from DroidScript via OTG cable.
//
// This program can be tested using the Aurduino serial
// monitor.
//
// Examples:
// type ‘lft100x’ to turn left at speed 100.
// type ‘buzy’ to turn buzzer on, ‘buzn’ to turn it off.
//
// Copyright: droidscript.org
// License: Creative Commons Attribution ShareAlike 3.0
//--------------------------------------------------------
#include
#include
#include
#include
//Global variables.
char g_version[] = “0.10 ”;
MeDCMotor g_motorL( M1 );
MeDCMotor g_motorR( M2 );
MeUltrasonicSensor ultraSensor( PORT_4 );
unsigned long timer = 0;
//Setup the hardware.
void setup()
{
//Setup USB serial comms.
Serial.begin( 115200 );
Serial.setTimeout( 100 );
}
//This function is called forever.
void loop()
{
//Read serial commands.
while( Serial.peek() != -1 )
{
//Read 3 character command.
char cmd[4] = “---”;
Serial.readBytes( cmd, 3 );
//Execute command.
if( strcmp( cmd, “buz” )==0 ) Buzzer();
else if( strcmp( cmd, “stp” )==0 ) Stop();
else if( strcmp( cmd, “fwd” )==0 ) Forward();
else if( strcmp( cmd, “rev” )==0 ) Reverse();
else if( strcmp( cmd, “l(fā)ft” )==0 ) Left();
else if( strcmp( cmd, “rgt” )==0 ) Right();
else if( strcmp( cmd, “ver” )==0 ) GetVersion();
}
//Report status every second.
if( (millis()-timer) 》 1000 )
{
timer += 1000;
Report();
}
}
//Get software version.
void GetVersion()
{
Serial.print( g_version );
}
//Send status back to DroidScript App.
void Report()
{
int dist = ultraSensor.distanceCm();
Serial.println( String(“dist:”) + dist + String(“;”) );
}
//Control buzzer.
void Buzzer()
{
//Read on/off parameter.
char onOff;
Serial.readBytes( &onOff, 1 );
//Start of stop buzzer.
if( onOff==‘y’ ) buzzerOn();
else buzzerOff();
}
//Turn vehicle left.
void Left()
{
//Read speed parameter.
int speed = Serial.parseInt();
//Turn on motors.
g_motorL.run( -speed );
g_motorR.run( speed );
}
//Turn vehicle right.
void Right()
{
//Read speed parameter.
int speed = Serial.parseInt();
//Turn on motors.
g_motorL.run( speed );
g_motorR.run( -speed );
}
//Drive vehicle forward.
void Forward()
{
//Read speed parameter.
int speed = Serial.parseInt();
//Turn on motors.
g_motorL.run( speed );
g_motorR.run( speed );
}
//Reverse vehicle.
void Reverse()
{
//Read speed parameter.
int speed = Serial.parseInt();
//Turn on motors.
g_motorL.run( -speed );
g_motorR.run( -speed );
}
//Stop vehicle.
void Stop()
{
//Turn off motors.
g_motorL.run( 0 );
g_motorR.run( 0 );
}
步驟6:創(chuàng)建電話應(yīng)用
-從Google Play安裝免費(fèi)的DroidScript IDE應(yīng)用。
-導(dǎo)航使用手機(jī)的瀏覽器訪問(wèn)以下鏈接,并從此處下載DroidScript項(xiàng)目(.SPK)文件:-http://androidscript.org/demos/rover
-使用文件瀏覽器,例如Explorer +或ES單擊文件資源管理器,然后打開(kāi)下載的.spk文件。然后將.project文件自動(dòng)安裝到DroidScript中(詢問(wèn)您是否信任源文件時(shí),選擇“是”)。
步驟7:試用一下!

-將電池放在控制器板上,然后打開(kāi)滑動(dòng)電源開(kāi)關(guān)。
-將OTG電纜插入(或重新插入)手機(jī)(
-觸摸DroidScript中的圖標(biāo),啟動(dòng)“ Rover”應(yīng)用。
-按“ fwd”鍵,然后按“ 3”鍵,然后按“運(yùn)行”按鈕(您的流動(dòng)站應(yīng)向前行駛3秒鐘)。
-按“語(yǔ)音”鍵并嘗試與之通話(注意:通常最好下載離線語(yǔ)音識(shí)別
-嘗試在超聲波傳感器向前移動(dòng)時(shí)將手放在超聲波傳感器的前面。
-嘗試按住
第8步:進(jìn)一步的實(shí)驗(yàn)
有負(fù)載 mor可以使用DroidScript添加到此機(jī)器人的酷功能,例如 GPS 導(dǎo)航,羅盤(pán)方向,面部跟蹤,運(yùn)動(dòng)檢測(cè),遠(yuǎn)程攝像頭流等。只需瀏覽一下DroidScript示例,看看您能找到什么。
對(duì)機(jī)器人進(jìn)行編程的最佳方法是使用DroidScript的 WiFi IDE 。這使您可以通過(guò)WiFi連接到手機(jī),并使用PC或Mac上運(yùn)行的網(wǎng)絡(luò)瀏覽器遠(yuǎn)程編輯程序(只需按DroidScript應(yīng)用程序左上方的小箭頭按鈕即可進(jìn)行連接)。
-
智能手機(jī)
+關(guān)注
關(guān)注
66文章
18611瀏覽量
183127 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29533瀏覽量
211706 -
Android
+關(guān)注
關(guān)注
12文章
3966瀏覽量
129631
發(fā)布評(píng)論請(qǐng)先 登錄
STM32+Android實(shí)現(xiàn)的智能家政機(jī)器人電路代碼論文及項(xiàng)目源碼
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
名單公布!【書(shū)籍評(píng)測(cè)活動(dòng)NO.58】ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐
安富利推動(dòng)多功能機(jī)器人的發(fā)展和應(yīng)用

多功能復(fù)合機(jī)器人設(shè)計(jì)方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論