") 3D打印四足機(jī)器人的制作
3D打印四足機(jī)器人的制作

步驟1:機(jī)箱的設(shè)計(jì)
機(jī)箱的設(shè)計(jì)應(yīng)確保施加在電機(jī)上的最大扭矩
在電動(dòng)機(jī)的額定范圍內(nèi)。
在設(shè)計(jì)機(jī)箱時(shí)要記住的主要參數(shù)是:
1。股骨長度
2。脛骨長度
3。估計(jì)的重量(保持在較高的一側(cè))
4。所需間隙
由于這是硬件,因此必須采取足夠的間隙。我到處都使用了自攻螺絲。所以我的設(shè)計(jì)中確實(shí)有線程。用3D打印機(jī)制作小螺紋并不是一個(gè)好主意。您可能必須先打印小零件,以便在最終裁切之前檢查間隙。僅當(dāng)您像我這樣沒有足夠的經(jīng)驗(yàn)時(shí),才需要執(zhí)行此步驟。
如果您想進(jìn)一步控制四足動(dòng)物的運(yùn)動(dòng)。步態(tài)設(shè)計(jì)也應(yīng)納入方程式。因?yàn)檫@是我的第一個(gè)項(xiàng)目,所以我稍后才意識(shí)到這一點(diǎn)。
步驟2:3D打印機(jī)箱
我3D打印了PLA的機(jī)箱(Poly乳酸)。打磨零件以獲得足夠的間隙。然后按照我的設(shè)計(jì),用伺服器組裝所有零件。請(qǐng)記住,您的所有伺服器都是同一制造商,因?yàn)椴煌闹圃焐炭赡芫哂胁煌脑O(shè)計(jì)。這發(fā)生在我身上。因此,請(qǐng)事先檢查。
步驟3:操作電路

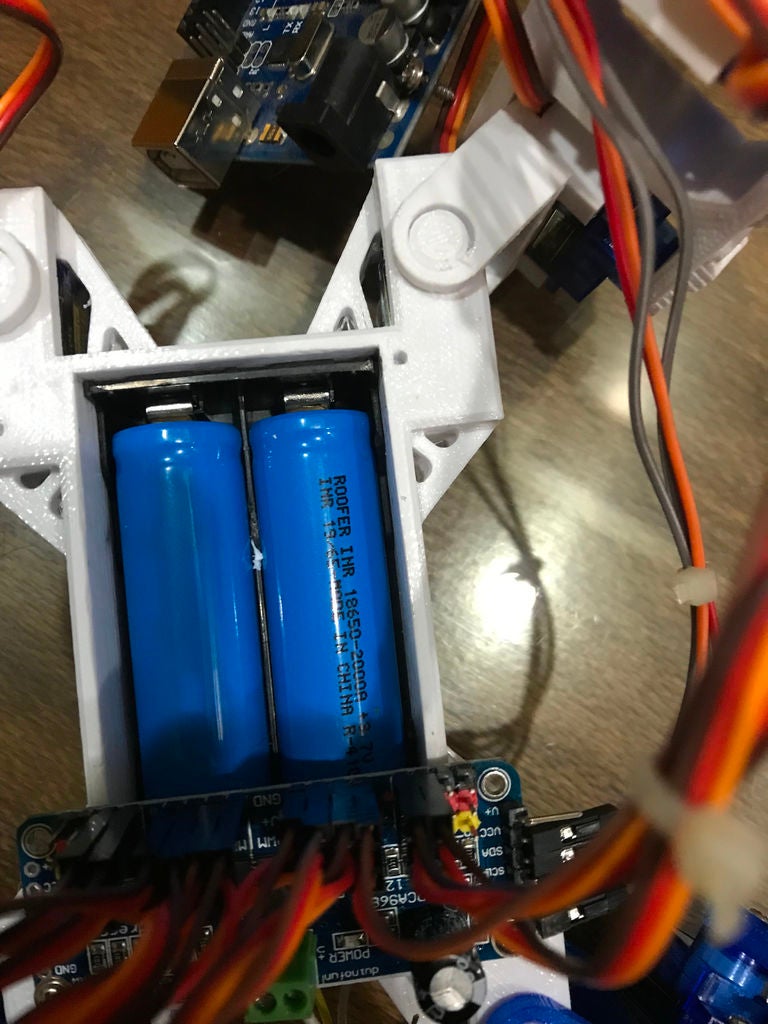
我正在使用Arduino UNO和適用于我的機(jī)器人的16通道伺服控制器。您可以在網(wǎng)上輕松找到它們。相應(yīng)地連接引腳。您需要編寫伺服引腳與哪個(gè)引腳的連接。否則以后會(huì)引起混亂。將電線捆扎在一起。我們很高興。
對(duì)于電池,我提供了兩個(gè)高電流放電的LiPo電池(3.7V)。我將它們并聯(lián)連接,因?yàn)樗欧淖畲筝斎霝?v。
第4步:對(duì)四足動(dòng)物進(jìn)行編碼
盡管開始時(shí)看起來很困難,但以后會(huì)變得更容易。步態(tài)設(shè)計(jì)是您編寫代碼時(shí)要記住的。請(qǐng)記住以下幾點(diǎn):
1。在任何時(shí)候,四足動(dòng)物的重心都必須在雙腿形成的區(qū)域內(nèi)。
2。角度應(yīng)從設(shè)定參考中獲取。這取決于您的設(shè)計(jì)以及您希望如何移動(dòng)雙腿。
3。我使用的是180度伺服電機(jī),而不是齒輪減速電機(jī),因此您在固定伺服電機(jī)時(shí)已進(jìn)行了檢查
關(guān)于代碼的說明,此鏈接就足夠了:
https://makezine.com/2016/11/22/robot-quadruped-ar 。..
這些是我的代碼
第5步:幾何計(jì)算
角度是通過三角學(xué)計(jì)算的:
1。您首先找到2D腿長
2。然后檢查機(jī)器人的仰角
有了這兩個(gè)約束,您可以輕松計(jì)算出伺服系統(tǒng)的角度。
寫我已經(jīng)編寫了前進(jìn)代碼。我將在以后再次嘗試時(shí)更新代碼。
步驟6:進(jìn)一步改進(jìn)
我將為控件添加一個(gè)藍(lán)牙(BLE)模塊
感謝您查看我的項(xiàng)目,歡迎有任何疑問。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29735瀏覽量
212848 -
3D打印
+關(guān)注
關(guān)注
27文章
3590瀏覽量
112490
發(fā)布評(píng)論請(qǐng)先 登錄
人形機(jī)器人 3D 視覺路線之爭:激光雷達(dá)、雙目和 3D - ToF 誰更勝一籌?
機(jī)器人看點(diǎn):越疆機(jī)器人正式發(fā)布六足仿生機(jī)器狗 智元公布機(jī)器人運(yùn)動(dòng)控制模型專利
年出貨約2萬臺(tái)!中國廠商主導(dǎo)全球四足機(jī)器人市場
開源項(xiàng)目!基于Arduino控制的六足機(jī)器人
四足機(jī)器人的結(jié)構(gòu)、控制及運(yùn)動(dòng)控制

四足巡檢機(jī)器人特點(diǎn)和作用是什么

禾賽科技推出面向機(jī)器人領(lǐng)域的迷你3D激光雷達(dá)
開源項(xiàng)目!OpenCat—— 一個(gè)全能的平價(jià)四足機(jī)器人
認(rèn)識(shí)機(jī)器人與CW32四足機(jī)器人控制項(xiàng)目
在NVIDIA Isaac Lab中訓(xùn)練四足機(jī)器人運(yùn)動(dòng)


3D雷達(dá)掃描機(jī)器人,抗粉塵、實(shí)時(shí)監(jiān)控 #3D雷達(dá)掃描機(jī)器人 #3D雷達(dá)料位計(jì) #3D雷達(dá)物位計(jì) #智慧料倉
開源項(xiàng)目!用ESP32做一個(gè)可愛的無用機(jī)器人
開源項(xiàng)目!用ESP32做一個(gè)可愛的無用機(jī)器人
3d打印機(jī)器人外殼模型ABS材料3D打印噴漆服務(wù)-CASAIM
3D打印汽車零部件建模設(shè)計(jì)3D打印服務(wù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論