 3D打印四足機器人的制作教程
3D打印四足機器人的制作教程

第1步:打印3D模型
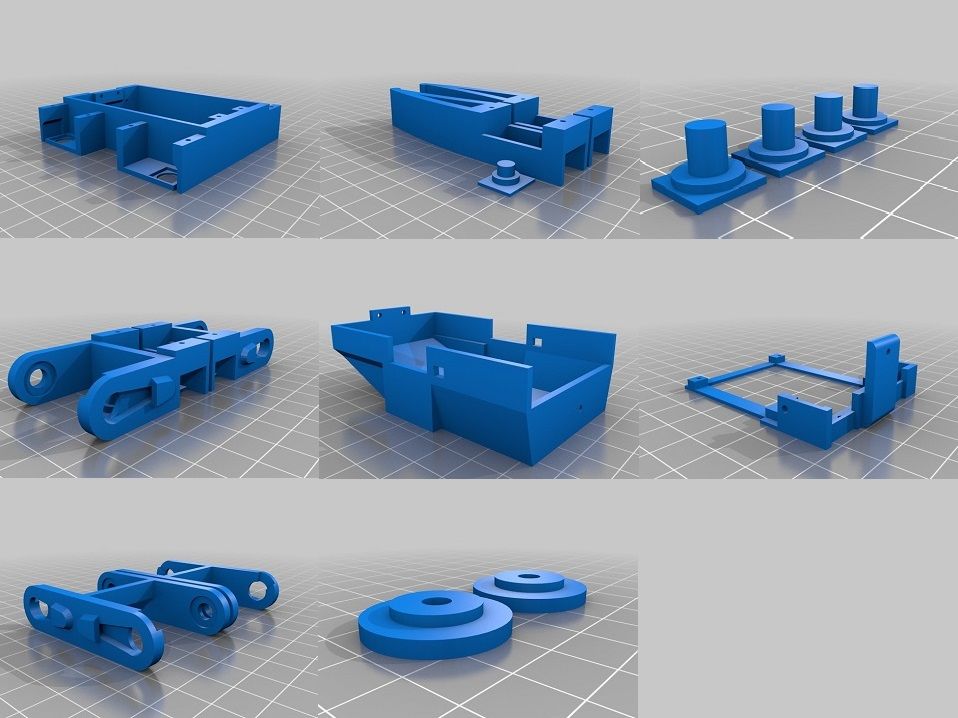
您可以調整它們以適合您正在使用的3D打印機。如果您沒有3D打印機,您可以找到在線3D打印服務。
底部/頂部厚度:1mm
外殼厚度:1.2mm
ayer高度:0.2mm填充
密度:10%
支持:是
粘合類型:裙邊或邊緣
第2步:軟件
軟件可免費下載:
機器人代碼 -
githup上的Arduino代碼
通過Arduino軟件中的open firmware.ino上傳Arduino代碼,請參閱IOS app上的步驟10和Android應用程序上的第11步一起控制機器人。
for HuaDuino,在Arduino IDE軟件中:
電路板選擇:“Arduino Nano”,處理器“ATmega328”對于AVR板支持1.6.20或更早版本;
電路板選擇:“Arduino Nano”,處理器“ATmega328(舊引導程序)”,用于AVR板支持1.6.21或更新版本。
控制應用
goble - Apple Store上的iOS應用
playBLE - Android應用開啟Google Play
virtual-gamepad-BLE - 支持者為Android 5.0和最新版本提供的Android應用程序。
虛擬游戲手柄-SPP Android應用程序由HC-06,HC-05和SPP-CA經典藍牙4.0 SPP模塊的支持者提供;與Android 4.0及更高版本兼容
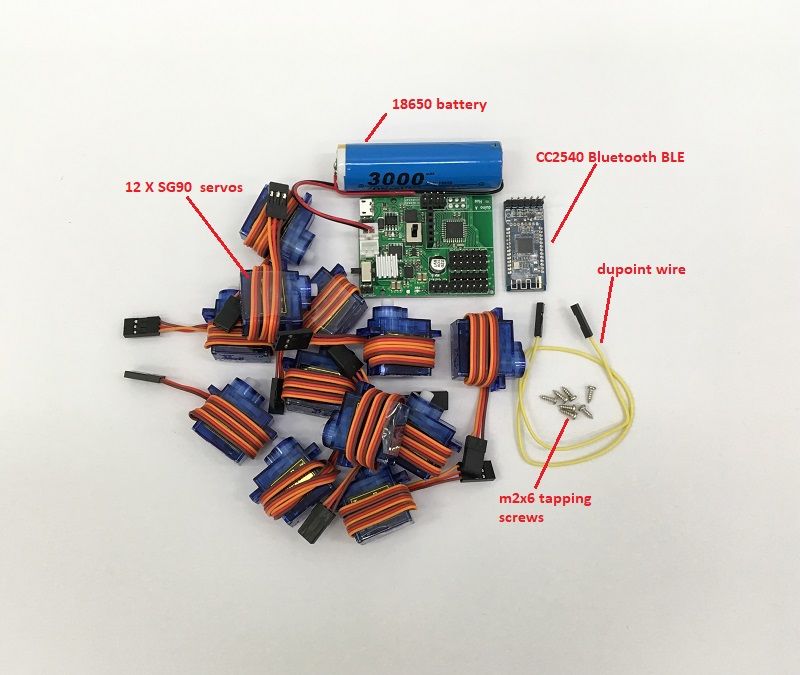
步驟3:硬件
主要 -
一款華都諾主板,它與Arduino Nano兼容,增強功能。它將所有內容集成在一塊PCB上。人們用它制作機器人要容易得多。嵌入式電池充電電路,電池充電更方便。它可以在ebay上找到。
單個3.7V 18650鋰離子電池或帶XH2.54連接器的電池組,如果您需要更長的運行時間,并獲得兩個18650并聯的電池組。您可能想要使用這個18650電池座。然而,使用3.7V 10440鋰離子和3.7V鋰聚合物電池尺寸不大于W35mm,L70mm和T60mm也是可以的。
12 x Tower Pro SG90或兼容的9g伺服電機。
女性 - 女性雙絞線或任何可以用來連接兩個引腳的東西
一些m2x6自攻螺釘
藍牙模塊 - 如果您不需要App控件,則此模塊是可選的
HC-06,HC-05和SPP-CA經典藍牙4.0 SPP模塊 - 如果您不需要App控制,這是可選的。如果您使用此類型的藍牙模塊,則必須使用虛擬游戲手柄-SPP Android應用進行控制;波特率必須設置為115200;請參閱本教程,使用AT命令配置波特率;
或
BT-05 CC2540藍牙LE模塊 - 如果您不需要App控制,這是可選的。實際上,有許多BLE模塊的命名方式不同,但它們都是用CC254x芯片構建的。 HM-10和CC41-A等示例是市場上常見的典型產品。由于固件不同,AT命令集也可能不同。您可以使用此代碼來識別它們。要使用機器人代碼和應用程序,需要將波特率設置為115200;服務UUID必須設置為0xDFB0,并且使用AT命令將特征UUID設置為0xDFB1。下面是自動執行此操作的代碼,但如果您有不同的代碼則可能無效。可以在此處下載用于配置BT-05 BLE的AT命令集的引用。如果你想讓這個游戲手柄控制并玩Spidey,你不需要這個模塊。
以下只需要藍牙LE模塊
以下Arduino程序發出AT命令設置BLE模塊服務UUID,特征ID和波特率,假設BLE默認波特率為9600.為了在HuaDuino中運行以下代碼并將模塊放在其上,S1開關必須設置為BT位置。
void setup() {
Serial.begin(9600); //change to fit your ble initial baud_rate, usually is 9600
Serial.println(“AT+UUID0xDFB0 ”); // set service UUID
delay(50);
Serial.println(“AT+CHAR0xDFB1 ”); // set characteristic UUID
delay(50);
Serial.println(“AT+BAUD8 ”); // set baud rate to 115200
}
void loop() {}
將Arduino草圖上傳到HuaDuino進行BLE控制的步驟如下:
插入BLE模塊,將S1切換到USB側,打開huaduino,
上傳上面的模塊設置程序
關閉huaduino,將S1切換到BT側
轉在huaduino上,讓ble模塊安裝程序在幾秒鐘內運行。
將S1切換到USB端
上傳機器人程序
將S1切換回BT側,機器人現在可以通過BLE控制
步驟4:安裝伺服系統和控制板
步驟5:腿
步驟6:伺服接線
連接HuaDuino的數字引腳如下:
D2到右前方股骨伺服
D3到右前方脛骨伺服
D4到右前方coxa伺服
D5到右后方股骨伺服
D6向后右脛骨伺服
D7向后右舵伺服
D8向左前方股骨伺服
D9向左前方脛骨伺服
D10到左前舵伺服
D11到左后股骨伺服
D12到左后脛骨伺服
D13到左后舵伺服
步驟7:校準
使用A5和3.3V引腳之間的母 - 母雙絞線,機器人伺服系統將設置為默認參考角度。這是安裝伺服系統并使伺服臂加蓋在正確角度的狀態。
步驟8:安裝伺服臂
連接在A5和3.3V引腳之間的母 - 母雙絞線,將伺服臂置于伺服軸上
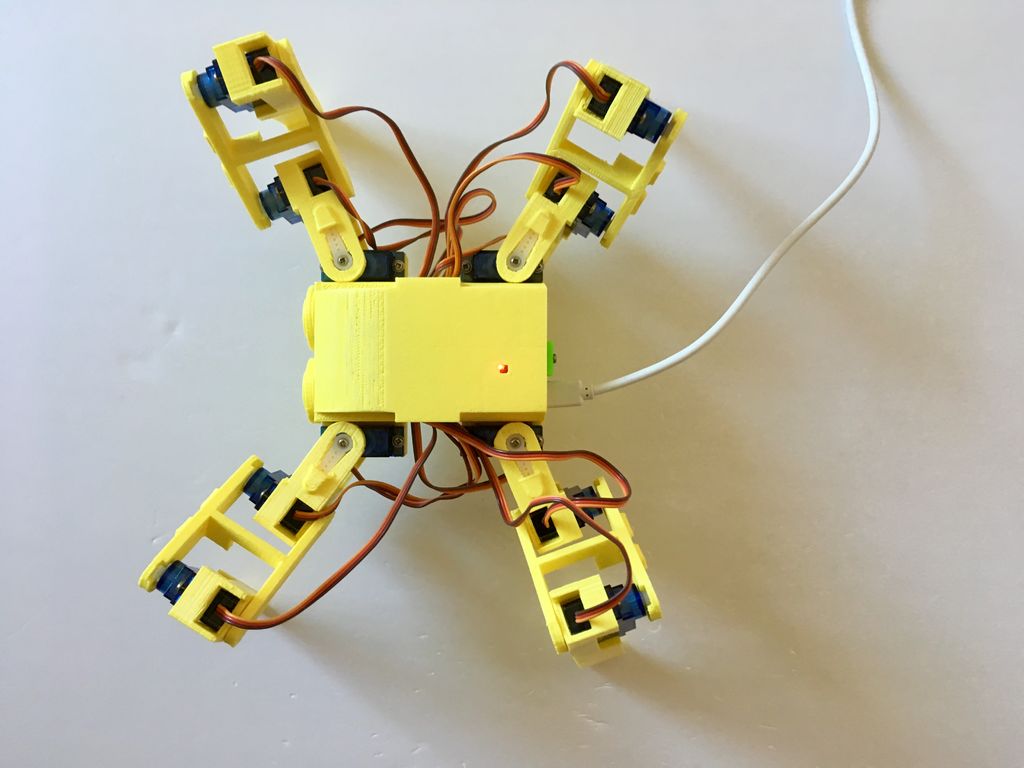
步驟9:完成
將CC2540藍牙BLE模塊插入主板的藍牙連接器,然后將S1開關滑到BT側,最后用頂蓋和眼睛關閉機器人。
步驟10:使用iPhone播放
要成功完成此部分,您必須配置CC2540藍牙BLE模塊,請參閱步驟3 - 硬件
打開iOS應用并關閉機器人
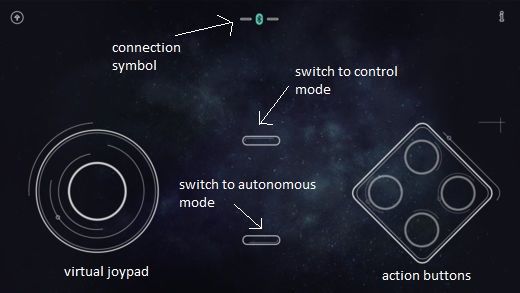
幾秒鐘后,機器人和iPhone之間的BLE配對應該完成,你會看到連接符號變為綠色
按下頂部中間虛擬按鈕將機器人切換到控制模式
按下底部中間虛擬按鈕將轉動b ack to autonomous self walk mode
步驟11:使用Android手機播放
打開Android應用程序,當機器人按下連接符號關閉頂部邊緣
幾秒鐘后,您應該看到列出的BLE設備并選擇它,連接符號應在成功時變為藍色
按頂部中間虛擬按鈕將切換到控制模式
按下底部中間虛擬按鈕將返回自主自行走模式
步驟12:電池充電
紅燈表示正在充電
綠燈表示充電已完成
-
機器人
+關注
關注
213文章
29735瀏覽量
212848 -
3D打印
+關注
關注
27文章
3590瀏覽量
112490
發布評論請先 登錄
人形機器人 3D 視覺路線之爭:激光雷達、雙目和 3D - ToF 誰更勝一籌?
機器人看點:越疆機器人正式發布六足仿生機器狗 智元公布機器人運動控制模型專利
年出貨約2萬臺!中國廠商主導全球四足機器人市場
開源項目!基于Arduino控制的六足機器人
四足機器人的結構、控制及運動控制

四足巡檢機器人特點和作用是什么

禾賽科技推出面向機器人領域的迷你3D激光雷達
開源項目!OpenCat—— 一個全能的平價四足機器人
在NVIDIA Isaac Lab中訓練四足機器人運動


開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
3d打印機器人外殼模型ABS材料3D打印噴漆服務-CASAIM
3D打印汽車零部件建模設計3D打印服務






 工商網監
工商網監
評論