") 如何使用Arduino驅(qū)動(dòng)的步進(jìn)電機(jī)來驅(qū)動(dòng)時(shí)間推移軌道
如何使用Arduino驅(qū)動(dòng)的步進(jìn)電機(jī)來驅(qū)動(dòng)時(shí)間推移軌道
步驟1:工作原理:




對于時(shí)間推移攝影,我使用由Gunther Wegner設(shè)計(jì)的名為 LRTimelapse Pro-Timer 的間隔計(jì)。這是一款高品質(zhì)的開源間隔計(jì),適用于您可以自行構(gòu)建的時(shí)間流逝,宏觀和天文攝影師。 Gunther,非常感謝您為時(shí)間推移社區(qū)提供的這個(gè)神奇工具。 (有關(guān)更多信息,請參閱lrtimelapse-pro-timer-free)
我剛添加了一些代碼來控制步進(jìn)電機(jī)。
工作原理:時(shí)間Lapse Rail適用于 從屬模式 。這種方法非常可靠。這意味著我正在使用LRTimelapse Pro-Timer Intervalometer設(shè)置拍攝張數(shù)和拍攝間隔。間隔計(jì)向相機(jī)發(fā)送信號以發(fā)射快門。拍攝照片后,相機(jī)會(huì)向運(yùn)動(dòng)控制器發(fā)送信號,以便在移動(dòng)/拍攝/移動(dòng)序列上移動(dòng)導(dǎo)軌的滑塊。啟動(dòng)序列的信號來自相機(jī)的閃光燈熱靴。相機(jī)的閃光燈設(shè)置為后簾同步,因此當(dāng)相機(jī)的簾幕關(guān)閉時(shí),信號將被發(fā)送回運(yùn)動(dòng)控制器。這意味著滑塊僅在快門關(guān)閉時(shí)才會(huì)移動(dòng),因此無論曝光長度如何都可以使用。
材料:從運(yùn)動(dòng)控制器到相機(jī)需要兩根電纜(相機(jī))特定型號)1) 相機(jī)快門釋放電纜 ,帶2.5 mm插孔和2) 熱靴適配器 使用插頭到公頭閃存PC 同步電纜線 和一個(gè)3.5毫米插孔。
步驟2:運(yùn)動(dòng)控制器板
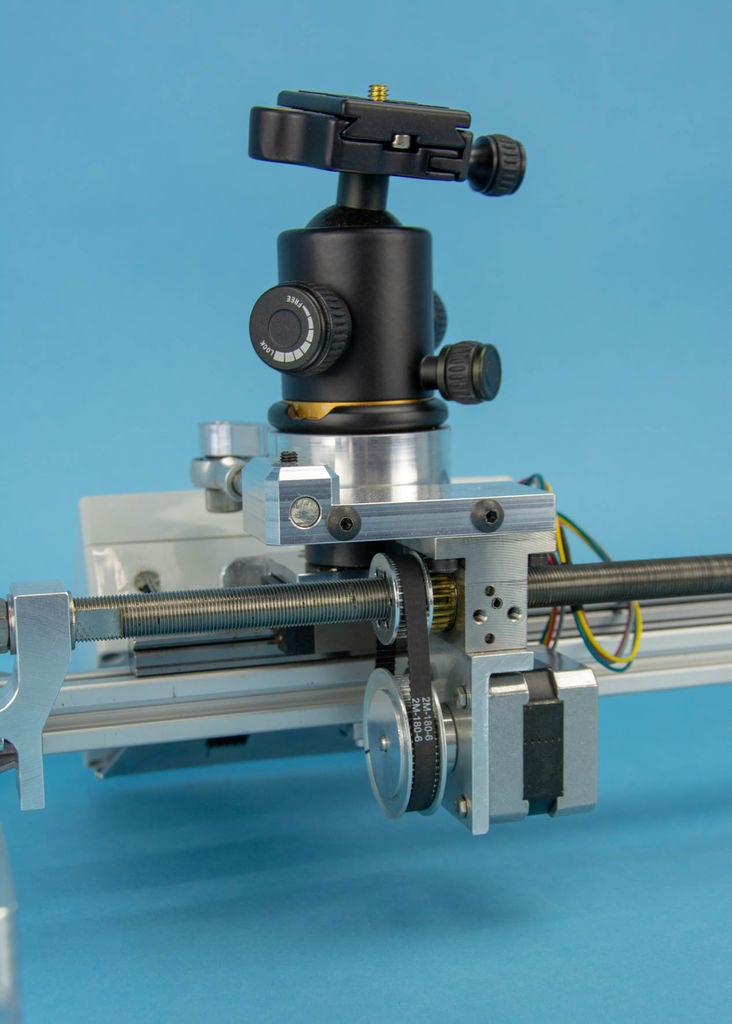

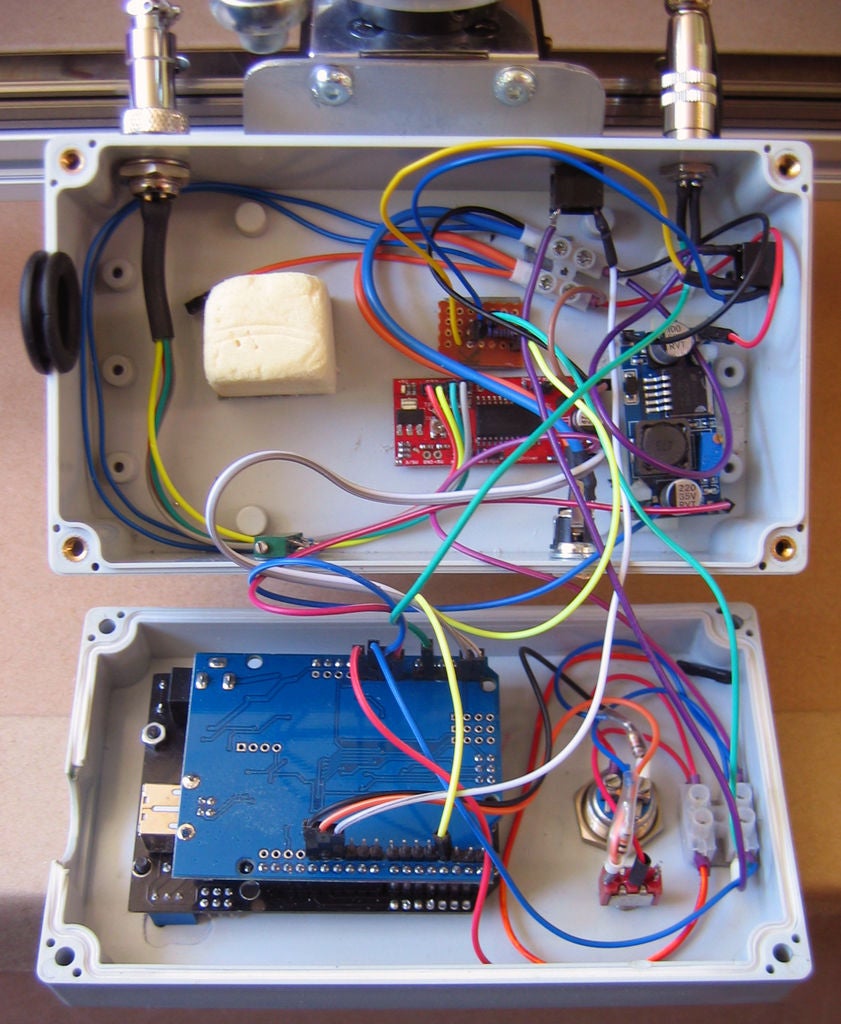
硬件:滑塊的移動(dòng)是通過連接到 NEMA 17步進(jìn)電機(jī)的螺釘進(jìn)行的。步進(jìn)電機(jī)由 Arduino UNO 控制的 EasyDriver 驅(qū)動(dòng)。為了使用具有不同電源組(從9v到30v)的控制器,我添加了 LM2596 DC-DC Arduino兼容電源模塊來調(diào)整電壓。請參閱附帶的 “Arduino Wiring.PDF” 。
使用2.5 mm插孔將相機(jī)快門釋放電纜插入控制器。根據(jù)附件“ 快門釋放.PDF ”中的原理圖連接插孔。 Hot Shoe Adapter的電纜使用3.5 mm插孔插入控制器。有兩種不同的尺寸可以避免將電纜插入錯(cuò)誤的端口。
步驟3:Arduino代碼
在編碼之前區(qū)分各種操作很重要你想實(shí)現(xiàn)。 Arduino允許使用所謂的 void 。 void是程序的一部分(代碼行),可以在必要時(shí)隨時(shí)調(diào)用。因此,將每個(gè)操作放在單獨(dú)的空白上可以使代碼保持井井有條并簡化編碼。
Sketch Logics.pdf 附件顯示了我想要實(shí)現(xiàn)的操作及其背后的邏輯。
第4步:Arduino代碼1 - 鐵路起始位置
第一個(gè)空白用于在啟動(dòng)控制器時(shí)將導(dǎo)軌發(fā)送到起始位置。
控制器有一個(gè)方向切換開關(guān)。在啟動(dòng)時(shí),滑塊沿切換器選擇的方向移動(dòng),直到它碰到導(dǎo)軌末端的限位開關(guān);然后它向后移動(dòng)一個(gè)用戶定義的距離(這是0或?qū)?yīng)于導(dǎo)軌另一端的值)。現(xiàn)在這是滑塊的起始位置。
使用附件中的代碼 BB_Stepper_Rail_ini.txt
步驟5:Arduino代碼2 - 雙功能按鈕
第二個(gè)空白用于手動(dòng)移動(dòng)滑塊即可。在開始延時(shí)序列之前設(shè)置攝像機(jī)時(shí),這非常有用。
控制器有一個(gè)按鈕,有兩個(gè)功能:1) 短按 (不到一秒鐘)按用戶定義的數(shù)量移動(dòng)滑塊。 2) 長按 (超過一秒)將滑塊移動(dòng)到導(dǎo)軌的中間或末端。兩個(gè)函數(shù)都按照切換開關(guān)選擇的方向發(fā)送滑塊。
使用附件中的代碼 BB_Dual-function-push-button.txt 《測試此void。/em》
步驟6:Arduino代碼3 - 從屬模式
第三個(gè)空白用于每次拍攝后將滑塊移動(dòng)一定量 。相機(jī)閃光需要設(shè)置為“后簾”。在鏡頭結(jié)束時(shí),閃光信號從閃光燈熱靴發(fā)送到控制器。這將啟動(dòng)序列并將滑塊移動(dòng)一定量。每次移動(dòng)的距離通過將軌道長度除以 LRTimelapse Pro-Timer 中選擇的鏡頭數(shù)來計(jì)算。但是,可以定義最大距離以避免在拍攝次數(shù)較少時(shí)快速移動(dòng)。
使用附件中名為 Slave mode.txt的代碼測試此空白。 的
第7步:Arduino Code 4 - Quad Ramping


第四個(gè)空白是一個(gè)漸變選項(xiàng),可以更順暢地進(jìn)出。這意味著每次移動(dòng)的距離將逐漸增加到設(shè)定值,并且在軌道的末端將以相同的方式減小。因此,當(dāng)觀察最終的延時(shí)序列時(shí),攝像機(jī)的運(yùn)動(dòng)在軌道的開始處加速并且在軌道的末端處減速。典型的Quad加速度曲線顯示在附圖中(緩入和縮小)。可以定義斜坡的距離。
我在Excel中測試了算法,并根據(jù)附圖設(shè)置了加速和減速曲線。使用附件中的代碼測試此void,該文件名為 BB_Stepper_Quad-Ramping-calculation.txt
注意:此四邊形漸變是不要與曝光長度變化的燈泡漸變或者拍攝間隔改變的間隔漸變混淆。
步驟8:Arduino代碼5 - 與LRTimelapse Pro-集成計(jì)時(shí)器
LRTimelapse Pro-Timer 是一款免費(fèi)的開源DIY間隔計(jì),適用于由Gunther Wegner為延時(shí)攝影師社區(qū)提供的延時(shí),微距和天文攝影師。在為我的相機(jī)建造一個(gè)單元后,我發(fā)現(xiàn)它非常好,以至于我開始考慮如何使用它來驅(qū)動(dòng)我的軌道。隨附的 LRTimelapse Pro-Timer 091_Logics.pdf 是一個(gè)簡短的手冊,展示了如何導(dǎo)航程序。
附件 BB_Timelapse_Arduino-code.pdf 顯示LRTimelapse Pro-Timer Free 0.91的結(jié)構(gòu),綠色表示我為操作滑塊添加的代碼行。
BB_LRTimelapse_091_VIS.zip 包含Arduino代碼,如果你想要去。
附件 BB_LRTimer_Modif-Only.txt 文檔列出了我對Pro-Timer的補(bǔ)充。當(dāng)Gunther使它們可用時(shí),它可以更容易地將它們集成到新版本的Pro-Timer。
步驟9:Arduino代碼6 - 變量和設(shè)置值



螺釘?shù)穆菥嗫赡懿煌蛘呷绻褂闷ВУ穆菥嗪推л喩系凝X數(shù)也可能不同。此外,步進(jìn)電機(jī)每轉(zhuǎn)的步數(shù)和導(dǎo)軌的長度可能不同。因此,跨越軌道長度的步數(shù)從一個(gè)軌道變?yōu)榱硪粋€(gè)軌道。
為了使控制器適應(yīng)不同的軌道,可以在程序中調(diào)整一些變量:
計(jì)算與限位開關(guān)之間的導(dǎo)軌長度相對應(yīng)的步數(shù)。在變量中輸入值: long endPos (即,使用此instructable中顯示的螺釘驅(qū)動(dòng)的導(dǎo)軌,此值為126000)
在開始時(shí)查看框架組成當(dāng)使用跨越效果時(shí),我使用長按選項(xiàng)和按鈕。在變量中輸入與導(dǎo)軌中間相對應(yīng)的步數(shù): long midPos (即,使用此指示中顯示的螺釘驅(qū)動(dòng)的導(dǎo)軌,此值為63000)
在LRTimelapse Pro-Timer中,您必須輸入要拍攝的照片數(shù)量。程序?qū)④壍篱L度除以此數(shù)字。如果您拍攝400張照片并且您的導(dǎo)軌為1米,則每個(gè)滑塊移動(dòng)將為1000:400 = 2.5 mm。對于100張圖片,該值為10毫米。這對于一個(gè)動(dòng)作來說太過分了。所以你可能決定不使用你的全長。輸入變量中允許的最大移動(dòng): const int maxLength (即,使用此instructable中顯示的螺釘驅(qū)動(dòng)的導(dǎo)軌,此值為500)
按下按鈕時(shí)比一秒鐘它將滑塊移動(dòng)一定距離,該距離可以在變量中設(shè)置: int inchMoveval (即,使用此指示中顯示的螺釘驅(qū)動(dòng)的導(dǎo)軌,此值為400)
Quad Ramping可以平滑進(jìn)出。您可以決定斜坡在軌道開始和結(jié)束處的持續(xù)距離。該值以變量的軌道長度的百分比形式輸入:浮動(dòng)比率(即0.2 =軌道長度的20%)
第10步:關(guān)于鐵路的幾句話
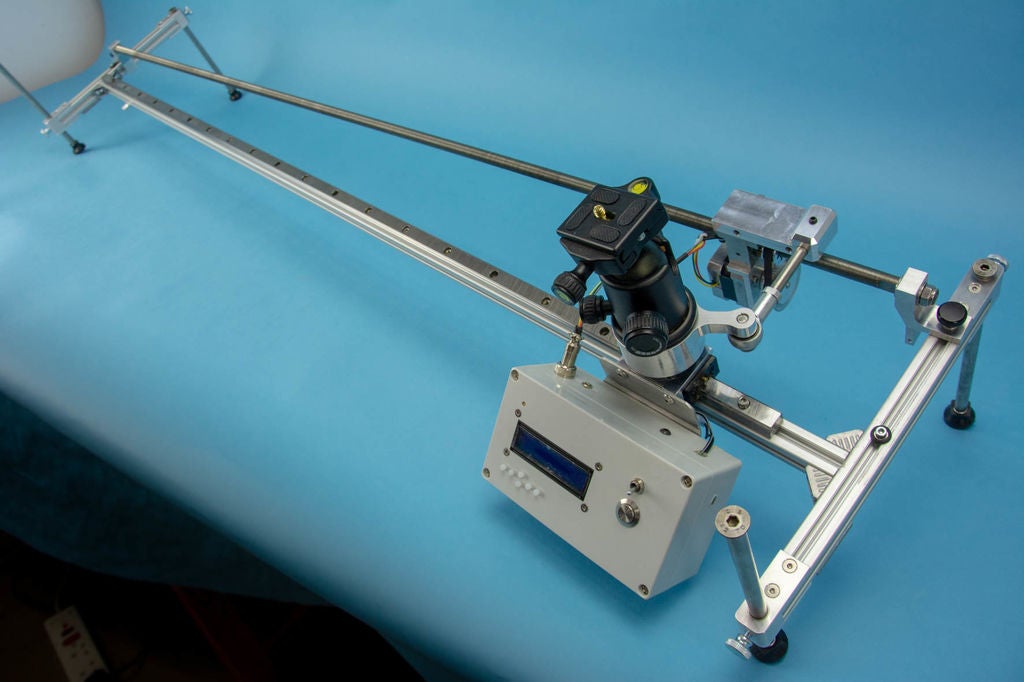
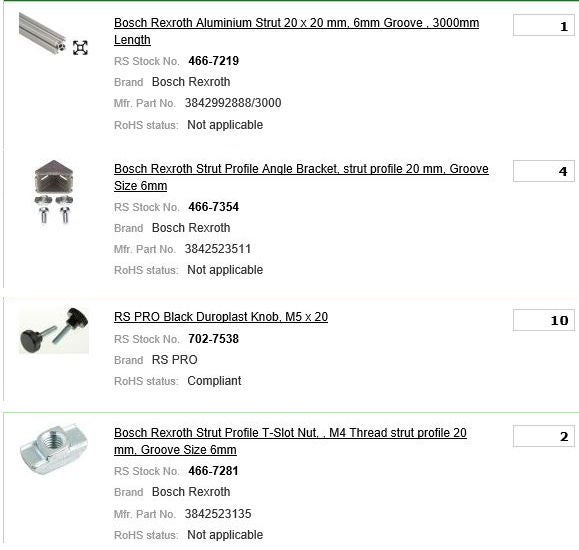
鐵路是一米長。它由重載線性軸承滑塊制成,用螺栓固定在開槽鋁擠壓桿上。我從RS.com購買了擠壓桿和配件(見圖片 rs items.jpg 附件)。導(dǎo)軌有四條腿,但也可以用標(biāo)準(zhǔn)螺釘安裝在三腳架上。
跨越:三腳架的球頭(根據(jù) 圖片附件 )安裝在滑塊上。一個(gè)小臂將頭部連接到螺釘上。如果您將螺釘從一側(cè)的導(dǎo)軌上移開,則螺釘和導(dǎo)軌之間會(huì)形成一個(gè)角度。當(dāng)滑塊沿著軌道移動(dòng)時(shí),它產(chǎn)生球頭的旋轉(zhuǎn)。如果您不想跨越,請保持螺釘與導(dǎo)軌平行。
控制器安裝在滑塊上。我選擇了這個(gè)選項(xiàng) - 而不是軌道一端的控制器 - 以避免多根電纜沿著軌道運(yùn)行。我在移動(dòng)電源和控制器之間只有一根電纜。所有其他電纜,步進(jìn)電機(jī),限位開關(guān),相機(jī)快門電纜和相機(jī)的同步電纜都隨控制器一起移動(dòng)。
螺釘與皮帶:對于延時(shí)攝影,兩種設(shè)計(jì)都運(yùn)作良好。與螺絲相比,皮帶允許更快的移動(dòng),如果您想將導(dǎo)軌轉(zhuǎn)換為視頻滑塊,這可能是一個(gè)優(yōu)勢。螺釘設(shè)計(jì)的一個(gè)優(yōu)點(diǎn)是當(dāng)您將導(dǎo)軌垂直或以一定角度放置時(shí),如果停電,滑塊將保持靜止且不會(huì)下降。我強(qiáng)烈建議您在使用皮帶驅(qū)動(dòng)導(dǎo)軌做同樣的事情時(shí)要小心,如果停電或者電量耗盡,攝像機(jī)將滑到導(dǎo)軌底部,風(fēng)險(xiǎn)自負(fù)!
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3157瀏覽量
149124 -
Arduino
+關(guān)注
關(guān)注
188文章
6491瀏覽量
190087
發(fā)布評論請先 登錄
HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路詳解
步進(jìn)電機(jī)驅(qū)動(dòng)器有哪些分類,如何選型?

步進(jìn)電機(jī)驅(qū)動(dòng)器的主要驅(qū)動(dòng)方式有哪些?簡單介紹
步進(jìn)電機(jī)驅(qū)動(dòng)器的主要工作原理是什么?
步進(jìn)電機(jī)驅(qū)動(dòng)器有哪些類型?該如何分類?
什么是步進(jìn)電機(jī)驅(qū)動(dòng)器?它具有什么特點(diǎn)?
探索步進(jìn)電機(jī)驅(qū)動(dòng)IC的創(chuàng)新融合






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論