") 關(guān)于中文版MATLAB和Simulink控制系統(tǒng)全教程解析和應(yīng)用
關(guān)于中文版MATLAB和Simulink控制系統(tǒng)全教程解析和應(yīng)用
該教程最初是由卡內(nèi)基梅隆大學(xué)機械工程系的Bill Messner教授和密歇根大學(xué)機械工程和應(yīng)用力學(xué)系的Dawn Tilbury教授編寫的,在2011年獲得了MathWorks的基金支持后,Bill Messner (CMU) 教授,Rick Hill (U Detroit-Mercy)教授助手和博士生JD Taylor (CMU)完成了網(wǎng)站頁面的重新設(shè)計,并對教程中的函數(shù)和工具按軟件的最新版本進行了更新。
除了包含MATLAB和Simulink的基礎(chǔ)教程,你可以查看下列每一種控制系統(tǒng)的:
系統(tǒng)建模
系統(tǒng)分析
根軌跡設(shè)計法
頻域設(shè)計法
狀態(tài)空間設(shè)計法
數(shù)字控制器設(shè)計
Simulink建模
Simulink控制器設(shè)計
在每一種自動控制設(shè)計方法中,該教程都包括基礎(chǔ)知識點與基本概念、圖像繪制方法、參數(shù)調(diào)節(jié)、系統(tǒng)建模和模型分析。

教程中不僅有自動控制知識點,同時還包括MATLAB與Simulink實現(xiàn)方法:
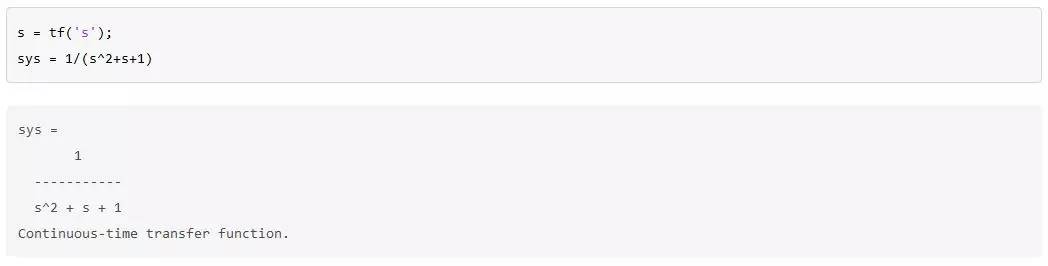
具體的MATLAB命令介紹以及運行代碼
教程中使用的所有MATLAB命令都用用淺灰色圖框作為背景,然后這些命令的輸出則直接在下方出現(xiàn)。
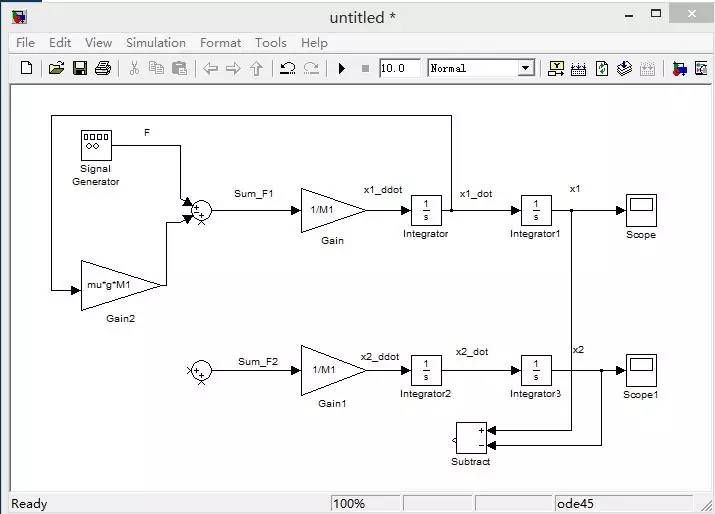
Simulink模模型設(shè)計框圖
MATLAB小貼士和使用技巧
改變bode圖中頻率的單位
獲取系統(tǒng)的復(fù)制和相位
改變圖中的字體大小和線寬
-
控制器
+關(guān)注
關(guān)注
114文章
16954瀏覽量
182761 -
建模
+關(guān)注
關(guān)注
1文章
315瀏覽量
61404 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4367瀏覽量
64105
發(fā)布評論請先 登錄
MATLAB/Simulink驅(qū)動汽車行業(yè)能效革命
運算放大器權(quán)威指南——中文版
直流電機控制方法的Matlab仿真研究
MATLAB仿真在直流電機雙閉環(huán)調(diào)速系統(tǒng)中的應(yīng)用
智能電動輪椅控制系統(tǒng)的研究與設(shè)計
AN-878: 高速ADC SPI控制軟件[中文版]
![AN-878: 高速ADC SPI<b class='flag-5'>控制</b>軟件[<b class='flag-5'>中文版</b>]](https://file.elecfans.com/web1/M00/D9/4E/pIYBAF_1ac2Ac0EEAABDkS1IP1s689.png)
Simulink與 Simscape的結(jié)合使用
Simulink與 MATLAB 的結(jié)合使用 Simulink中的信號處理方法
Simulink自定義模塊開發(fā)教程 Simulink 在控制系統(tǒng)中的應(yīng)用
分享兩則MATLAB和Simulink助力教學(xué)案例





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論