") 詳細(xì)解讀ADAS碰撞預(yù)警系統(tǒng)決策算法開發(fā)(1)
詳細(xì)解讀ADAS碰撞預(yù)警系統(tǒng)決策算法開發(fā)(1)
先進(jìn)的駕駛系統(tǒng)(AdvancedDriverAssistanceSystems)即高級駕駛員輔助系統(tǒng),簡稱ADAS,是利用安裝于車上各式各樣的傳感器(可偵測光、熱、壓力等變數(shù)),在第一時間收集車內(nèi)的環(huán)境數(shù)據(jù),進(jìn)行靜、動態(tài)物體的辨識、偵測與追蹤等技術(shù)上的處理,從而能夠讓駕駛者在最快的時間察覺可能發(fā)生的危險。,以引起注意和提高安全性的主動安全技術(shù)。
近年來ADAS市場增長迅速,原來這類系統(tǒng)局限于高端市場,而現(xiàn)在正在進(jìn)入中端市場,與此同時,許多低技術(shù)應(yīng)用在入門級乘用車領(lǐng)域更加常見,經(jīng)過改進(jìn)的新型傳感器技術(shù)也在為系統(tǒng)布署創(chuàng)造新的機(jī)會與策略。
駕駛輔助系統(tǒng)主要由GPS和CCD相機(jī)探測模塊、通信模塊和控制模塊等組成。其中,GPS和CCD相機(jī)探測模塊通過GPS接收機(jī)接收GPS衛(wèi)星信號,求出該車的經(jīng)緯度坐標(biāo)、速度、時間等信息,利用安裝在汽車前部和后部的CCD相機(jī),實(shí)時觀察道路兩旁的狀況;通信模塊可以發(fā)送檢測到的相關(guān)信息并在相互靠近的汽車之間實(shí)時地傳輸行駛信息;控制模塊可以在即將出現(xiàn)事故的時候做出主動控制,從而避免事故的發(fā)生。
ADAS采用的傳感器主要有攝像頭、雷達(dá)、激光和超聲波等,可以探測光、熱、壓力或其它用于監(jiān)測汽車狀態(tài)的變量,通常位于車輛的前后保險杠、側(cè)視鏡、駕駛桿內(nèi)部或者擋風(fēng)玻璃上。早期的ADAS技術(shù)主要以被動式報警為主,當(dāng)車輛檢測到潛在危險時,會發(fā)出警報提醒駕車者注意異常的車輛或道路情況。對于最新的ADAS技術(shù)來說,主動式干預(yù)也很常見。
ADAS通常包括以下系統(tǒng)
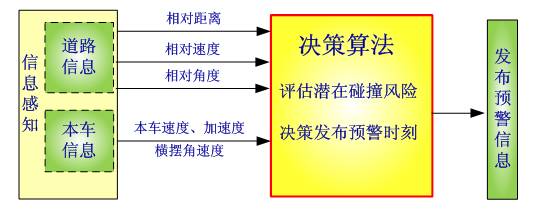
信息感知、決策算法、預(yù)警信息發(fā)布
前方防碰撞預(yù)警系統(tǒng)決策算法
在國內(nèi)外的諸多研究中,前方防碰撞預(yù)警系統(tǒng)決策算法可以分為兩種形式,一種是通過比較本車與前方目標(biāo)車輛之間的相對距離與安全距離的大小以判斷本車的行駛安全,稱為安全距離邏輯算法;另一種形式是通過輸入信息計算車輛間的潛在碰撞時間,并把此時間與安全時間門限值進(jìn)行比較來判斷系統(tǒng)車輛的行駛安全性,稱為安全時間邏輯算法。美國哈弗大學(xué)學(xué)者Fancher 、南安普敦大學(xué)的Sultan 等人都先后研究過安全時間邏輯算法[9]。由于不同的駕駛員其駕駛行為存在很大差異性,所以對安全時間門限值的設(shè)定也有不同的要求[18],為此,多數(shù)研究還是采用更為直觀的相對距離與相對速度對應(yīng)的安全距離邏輯算法來判斷汽車的行駛安全狀態(tài)。安全距離邏輯算法研究其原理是基于牛頓運(yùn)動定律,但對車輛行駛危險性進(jìn)行評估的方法各不相同,下面介紹幾種典型的安全距離邏輯算法。Knipling 等人在1993 年提出如公式(1.1)所示的算法,得到了包括日本馬自達(dá)公司、等多家企業(yè)與科研院所的普遍采用。

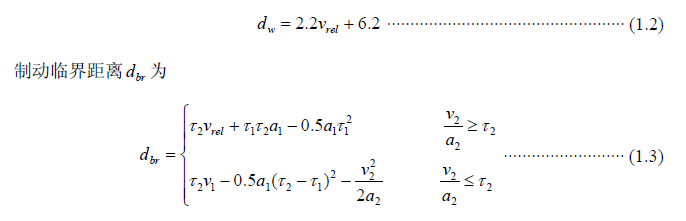
式中, 1 v 為本車速度; 2 v 為前方有效目標(biāo)車輛的速度, 1 a 為本車制動減速度; 2 a 為有效目標(biāo)的制動減速度, 1 t 為駕駛員反應(yīng)時間; 2 t 為制動系統(tǒng)延遲時間; w d 為預(yù)警。在此公式下,一般為了計算的簡化,對公式中的本車制動減速度1 a 與前車制動減速度2 a設(shè)定固定值,常假設(shè)2 a 略小于1 a 或等于1 a ,并取當(dāng)前道路附著系數(shù)下制動車輛減速度的最大值。日本馬自達(dá)公司研制開發(fā)的防碰撞預(yù)警系統(tǒng)決策算法在公式(1.1)形式基礎(chǔ)上引入停車間距0 d ,其系統(tǒng)應(yīng)用于在高速公路上行駛的車輛之間。馬自達(dá)系統(tǒng)通過大量實(shí)驗(yàn)
測定公式中系統(tǒng)延遲時間和本車減速時間兩個參數(shù)。在實(shí)際工作中,當(dāng)車輛間的相對距離接近w d 時,馬自達(dá)的系統(tǒng)就會發(fā)出報警,即在相對距離小于 +ε w d 時刻駕駛員將收到報警信息,ε 為系統(tǒng)參數(shù);當(dāng)兩車間距離小于w d 時系統(tǒng)啟動剎車裝置。馬自達(dá)模型使用了停車間距的概念,使安全距離模型更為安全化與合理化,但是沒有考慮前后車輛間的相對運(yùn)動關(guān)系和路面因素對安全車距的影響[22]。
相對前面所述Knipling 等人提出的簡單算法,一些公司和科研院所對行駛工況進(jìn)行了分類,在Knipling 等人算法的基礎(chǔ)上,制定出更為細(xì)化的安全距離計算方法。
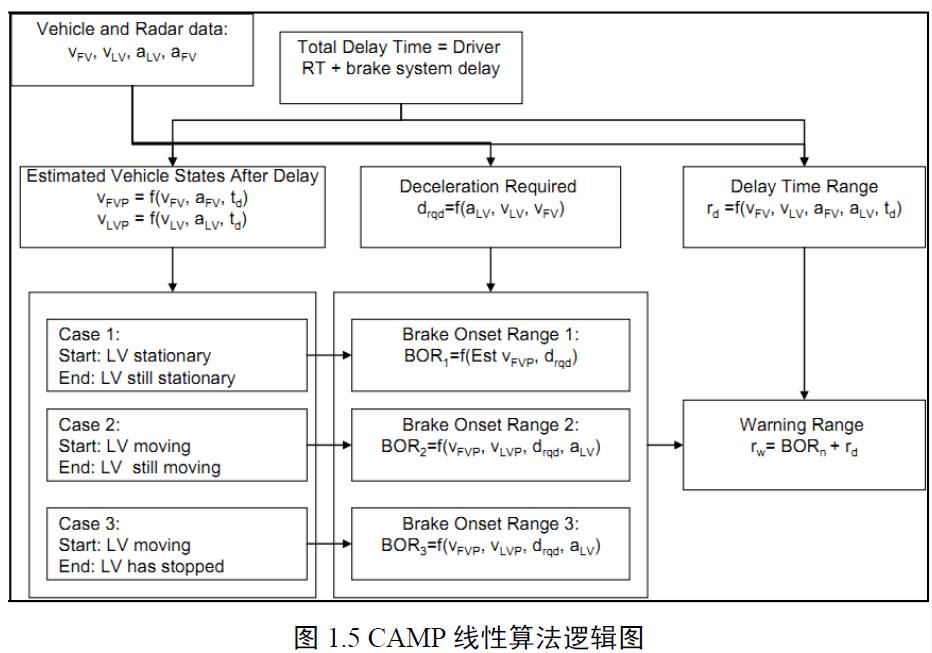
(1)CAMP(Crash Avoidance Metrics Partnership)的各成員通過對比FCW 系統(tǒng)的全部行駛工況與各工況的發(fā)生率,從中挑選出9 種最典型工況,進(jìn)行了大量的主觀評價與實(shí)車實(shí)驗(yàn),重點(diǎn)研究人的不同反應(yīng)時間與不同制動強(qiáng)度對碰撞預(yù)警信息發(fā)布時刻的影響[2]。CAMP 的線性算法由Kiefer 等人提出,算法中很多公式的參數(shù)是都在大量實(shí)驗(yàn)基礎(chǔ)上得出的經(jīng)驗(yàn)數(shù)值,其線性算法流程如圖1.5 所示。
-
傳感器
+關(guān)注
關(guān)注
2562文章
52553瀏覽量
763646 -
激光
+關(guān)注
關(guān)注
20文章
3421瀏覽量
65788 -
超聲波
+關(guān)注
關(guān)注
63文章
3100瀏覽量
139845 -
車輛防碰撞預(yù)警
+關(guān)注
關(guān)注
0文章
4瀏覽量
5072
發(fā)布評論請先 登錄
在消防預(yù)警系統(tǒng)中Modbus協(xié)議和EthernetIP協(xié)議都發(fā)揮著重要的作用
基于無線傳感器網(wǎng)絡(luò)的機(jī)床預(yù)警系統(tǒng)設(shè)計
基于RFID和無線傳感的礦井實(shí)時定位預(yù)警系統(tǒng)
怎么設(shè)計基于FPGA的車道偏離預(yù)警系統(tǒng)?
如何采用嵌入式方法完成汽車縱向碰撞預(yù)警系統(tǒng)的設(shè)計
求一款汽車山區(qū)道路行駛安全預(yù)警系統(tǒng)的設(shè)計方案
基于蒙特卡洛方法的碰撞預(yù)警系統(tǒng)仿真
變電站安全預(yù)警系統(tǒng)
“采礦助手”RFID碰撞預(yù)警系統(tǒng)問世
基于FPGA的目標(biāo)碰撞預(yù)警系統(tǒng)

疲勞駕駛預(yù)警系統(tǒng)的發(fā)展趨勢是和ADAS功能相結(jié)合

詳細(xì)解讀ADAS碰撞預(yù)警系統(tǒng)決策算法開發(fā)(2)
關(guān)于車道偏離預(yù)警系統(tǒng)和前碰撞預(yù)警系統(tǒng)分析介紹和應(yīng)用
蟲情測報燈預(yù)警系統(tǒng)是一種基于蟲情監(jiān)測的智能預(yù)警系統(tǒng)
智能防雷與雷電預(yù)警系統(tǒng)綜合方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論