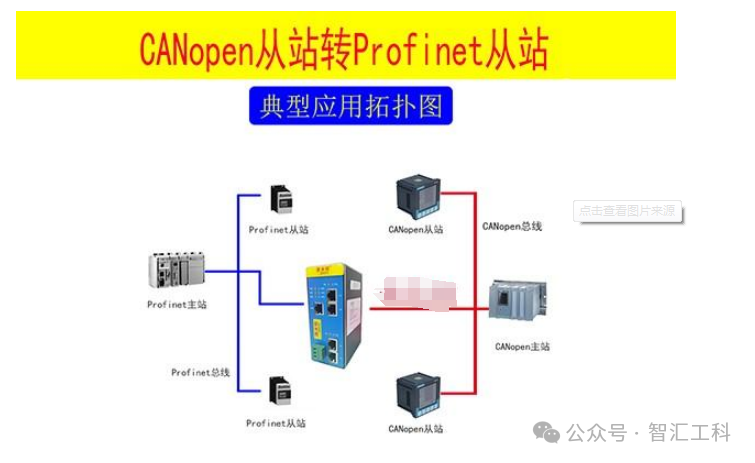
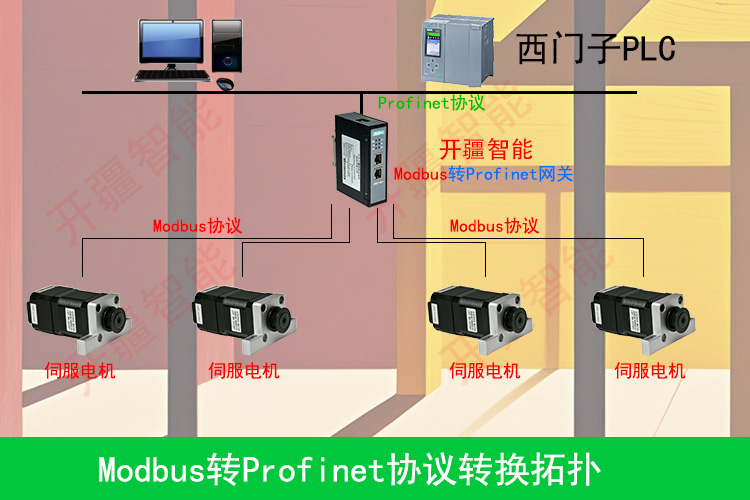
") 開疆智能CANOPEN轉(zhuǎn)PROFINET網(wǎng)關(guān)連接?xùn)|元JSDG2S交流伺服驅(qū)動器案例
開疆智能CANOPEN轉(zhuǎn)PROFINET網(wǎng)關(guān)連接?xùn)|元JSDG2S交流伺服驅(qū)動器案例
第一步:首先獲取正確版本的CANOpen Configuration Tools(CANOpen配置工具),本案例使用的版本為:
第二步:如果在本地電腦已經(jīng)安裝了低版本的CANOpen Configuration Tools,請先卸載,卸載方法參照產(chǎn)品使用說明書,然后安裝CANOpen Configuration Tools,如果沒有安裝過低版本的,請直接安裝;
第四步:請參照J(rèn)SDG2S系列使用說明書設(shè)置伺服工作在CANOpen模式下,CN001設(shè)置為C:

第五步:參照J(rèn)SDG2S系列使用說明書,設(shè)置CN078(CANOpen波特率)和CN079(CANOpen站地址),此處設(shè)置應(yīng)與下文CANOpen Configuration Tools的配置相同;
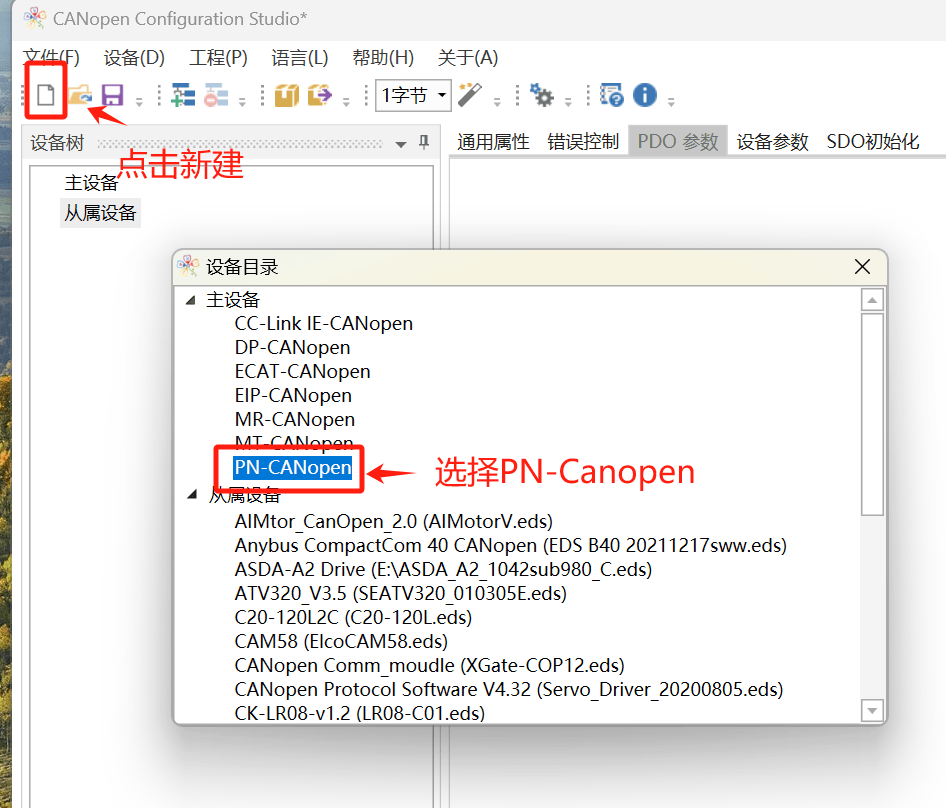
第六步:打開CANOpen Configuration Tools,按照網(wǎng)關(guān)使用說明書,在【文件】菜單中選擇【導(dǎo)入EDS文件】,導(dǎo)入與實際伺服配套的EDS文件,本案例使用的版本為:
第七步:添加主站設(shè)備,KJ-105M2,添加從站設(shè)備伺服,并設(shè)置從站的站地址為步驟五相同的站地址,本案例設(shè)置為3:

第八步:設(shè)置CANOpen主站參數(shù),波特率設(shè)置和步驟五相同,如果CANOpen網(wǎng)絡(luò)為同步模式,設(shè)置同步周期(此處根據(jù)canopen規(guī)范單位為:ns),圖中畫紅線的兩個參數(shù):
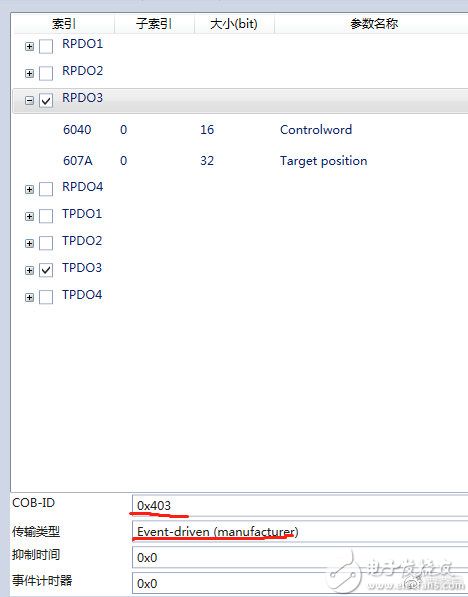
第九步:配置從站PDO參數(shù),伺服的EDS文件默認(rèn)RPDO1和TPDO1是有效的,可以根據(jù)需要的運(yùn)動模式進(jìn)行勾選,本案例使用位置模式,所以選擇RPDO3和TPDO3,映射模式選擇為Byte,并設(shè)置各個對象在輸入輸出區(qū)映像的偏移:

第十步:設(shè)置PDO的通訊參數(shù),主要是COB-ID和傳輸類型,此EDS文件的RPDO3的COB-ID默認(rèn)為0x400+&NodeID,因為站地址為3,所以此處的COB-ID為0x403,傳輸類型默認(rèn)為事件驅(qū)動,此處可以根據(jù)需要進(jìn)行不同的選擇,TPDO的通訊參數(shù)設(shè)置方法類似,TPDO3的COB-ID默認(rèn)為0x383+&NodeID,此處為0x383:
第十一步:伺服的設(shè)備參數(shù)設(shè)置,根據(jù)需求設(shè)置設(shè)備參數(shù),這些設(shè)備參數(shù)的設(shè)置,會通過后臺的SDO發(fā)送給伺服從站,本案例使用位置模式,所以模式設(shè)置為1(位置模式),這些參數(shù)的含義在使用說明書都有描述,由于伺服的默認(rèn)速度為0,所以速度也要設(shè)置一下,根據(jù)需要設(shè)置一個值:


第十二步:至此CANOpen參數(shù)設(shè)置就完成了,點擊【生成】按鈕,則生成下載文件,連接好網(wǎng)關(guān)的USB下載線,在設(shè)置中選擇正確的串口,進(jìn)行下載,CANOpen參數(shù)配置下載完成;
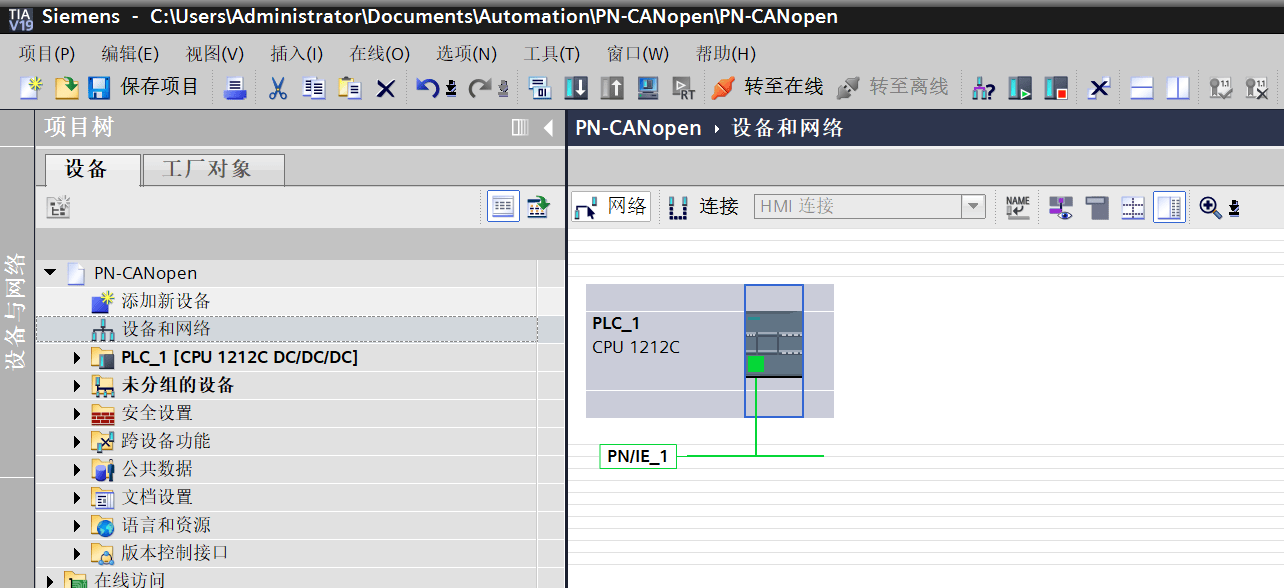
第十三步:打開西門子博途軟件,首先安裝網(wǎng)關(guān)的設(shè)備描述文件GSD文件,如果博途的版本較低比如V13,請選擇V2.3的GSD文件安裝,如果博途的軟件版本較高為V14、V15,請選擇V2.33的GSD文件安裝:
第十四步:根據(jù)在CANOpen的配置,在博途中配置網(wǎng)關(guān),CANOpen配置中配置了兩個字節(jié)的控制字,對應(yīng)博途的兩字節(jié)輸出,配置四個字節(jié)的目標(biāo)位置,對應(yīng)博途的四字節(jié)輸出,配置兩字節(jié)的狀態(tài)字,對應(yīng)博途兩個字節(jié)輸入,配置四個字節(jié)位置反饋值,對應(yīng)博途四個字節(jié)輸入,并確認(rèn)配置軟件的設(shè)備名和IP地址和博途配置一致,則配置完成,下載配置,
第十五步:以下步驟根據(jù)伺服的啟動順序修改控制字,先寫控制字06,狀態(tài)字變?yōu)?1;
第十六步:寫控制字07,狀態(tài)字變?yōu)?3;
第十七步:寫控制字0F,狀態(tài)字變?yōu)?7,完成此步驟則電機(jī)抱閘,用手是轉(zhuǎn)不動了;
第十八步:寫控制字1F,寫一個目標(biāo)位置,更新數(shù)據(jù),則電機(jī)開始轉(zhuǎn)動;
發(fā)布評論請先 登錄
開疆智能Profinet轉(zhuǎn)ModbusTCP網(wǎng)關(guān)連接WINCC配置案例
開疆智能canopen轉(zhuǎn)Profinet網(wǎng)關(guān)連接AGV磁釘讀頭配置案例
開疆智能Profinet轉(zhuǎn)canopen網(wǎng)關(guān)連接易福門(IFM)傳感器配置案例
CANOpen轉(zhuǎn)PROFINET網(wǎng)關(guān)連接低壓伺服系統(tǒng)
開疆智能profinet轉(zhuǎn)Modbus網(wǎng)關(guān)連接施耐德智能電動執(zhí)行機(jī)構(gòu)配置案例
開疆智能Profinet轉(zhuǎn)EthernetIP從網(wǎng)關(guān)連接ABB機(jī)器人做EtherNet主配置案例
開疆智能Ethernet/IP轉(zhuǎn)Profinet網(wǎng)關(guān)連接納博特控制器配置案例
零距離對接Modnbus轉(zhuǎn)Profinet網(wǎng)關(guān)連接伺服與PLC
探索 CAN 轉(zhuǎn) PN 網(wǎng)關(guān)連接 can 設(shè)備的精準(zhǔn)配置之道

代際躍升丨Modbus轉(zhuǎn)Profinet網(wǎng)關(guān)與伺服的智能之旅
Modbus轉(zhuǎn)Profinet網(wǎng)關(guān)助力GSHD伺服驅(qū)動器與PLC完美連接配置詳解

Profinet轉(zhuǎn)CanOpen網(wǎng)關(guān)連接與CanOpen協(xié)議磁軌道實現(xiàn)高效連接

智能橋梁:Profinet轉(zhuǎn)CanOpen網(wǎng)關(guān),臺達(dá)伺服無縫對接

canopen轉(zhuǎn)Profinet網(wǎng)關(guān)對于工業(yè)現(xiàn)場PLC與伺服之間的通訊重要性
解鎖工業(yè)自動化:通過CANopen轉(zhuǎn)Profinet的無縫對接






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論