 電子發燒友App
電子發燒友App


邊緣檢測和圖像分割的聯系:
邊緣檢測是通過圖像的梯度變化將圖像中梯度變化明顯的地方檢測出來,針對的是邊緣信息。圖像分割是將目標分割出來,針對的是目標對象,邊緣檢測是空間域圖像分割的一種方法,屬于包含關系
邊緣檢測后的圖像是二值圖像,對二值圖像可以運用形態學操作來分割目標,所以邊緣檢測是圖像分割的一個前提。但分割不一定非要用邊緣檢測。
圖像分割:
概念:
圖像分割是將圖像劃分成若干個互不相交的小區域的過程,所謂小區域是某種意義下具有共同屬性的像素的連通集合。
從集合的觀點看:它應該是具有如下性質的一種點集,集合R代表整個區域,對R的分割可看作將R分成N個滿足以下五個條件的非空子集R1,R2,…,RN:
目的:
無論是圖像處理、分析、理解與識別,其基礎工作一般都建立在圖像分割的基礎上;
將圖像中有意義的特征或者應用所需要的特征信息提取出來;
圖像分割的最終結果是將圖像分解成一些具有某種特征的單元,稱為圖像的基元;
相對于整幅圖像來說,這種圖像基元更容易被快速處理。
圖像分割原理
圖像分割的研究多年來一直受到人們的高度重視,至今提出了各種類型的分割算法。Pal把圖像分割算法分成了6類:閾值分割,像素分割、深度圖像分割、彩色圖像分割,邊緣檢測和基于模糊集的方法。但是,該方法中,各個類別的內容是有重疊的。為了涵蓋不斷涌現的新方法,有的研究者將圖像分割算法分為以下六類:并行邊界分割技術、串行邊界分割技術、并行區域分割技術、串行區域分割技術、結合特定理論工具的分割技術和特殊圖像分割技術。
圖像分割的特征:
分割出來的各區域對某種性質例如灰度,紋理而言具有相似性,區域內部是連通的的且沒有過多小孔。
區域邊界是明確的
相鄰區域對分割所依據的性質有明顯的差異
圖像分割的方法:
一、基于像素灰度值的分割方法:閾值(門限)方法
二、基于區域的分割方法:通過直接確定區域間的邊界來實現分割的邊界方法;
三、基于邊緣的分割技術:首先檢測邊緣像素, 再將邊緣像素連接起來構成邊界形成分割。
圖像分割包含的內容:
邊緣檢測
邊緣跟蹤 :
從圖像中一個邊緣點出發,然后根據某種判別準則搜索下一個邊緣點以此跟蹤出目標邊界。
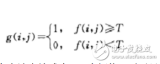
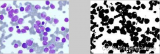
閾值分割 :
原始圖像——f(x,y)
灰度閾值——T
閾值運算得二值圖像——g(x,y)
區域分割:
閾值分割法由于沒有或很少考慮空間關系,使多閾值選擇受到限制
于區域的分割方法可以彌補這點不足,它利用的是圖像的空間性質,該方法認為分割出來的屬于同一區域的像素應具有相似的性質,其概念是相當直觀的。
傳統的區域分割算法有區域增長法和區域分裂合并法。該類方法在沒有先驗知識可以利用時,對含有復雜場景或自然景物等先驗知識不足的圖像進行分割, 也可以取得較好的性能。但是,空間和時間開銷都比較大。
區域生長法主要考慮象素及其空間鄰域象素之間的關系
開始時確定一個或多個象素點作為種子,然后按某種相似性準則增長區域,逐步生成具有某種均勻性的空間區域,將相鄰的具有相似性質的象素或區域歸并從而逐步增長區域,直至沒有可以歸并的點或其它小區域為止。
區域內象素的相似性度量可以包括平均灰度值、紋理、顏色等信息。
區域生長:
主要考慮像素及其空間鄰域像素之間的關系
開始時確定一個或多個像素點作為種子,然后按某種相似性準則增長區域,逐步生成具有某種均勻性的空間區域,將相鄰的具有相似性質的像素或區域歸并從而逐步增長區域,直至沒有可以歸并的點或其它小區域為止。
區域內像素的相似性度量可以包括平均灰度值、紋理、顏色等信息。
主要步驟:
選擇合適的種子點
確定相似性準則(生長準則)
確定生長停止條件
區域分裂:
條件:如果區域的某些特性不滿足一致性準則
開始:從圖像的最大區域開始,一般情況下,是從整幅圖像開始
注意:
確定分裂準則(一致性準則)
確定分裂方法,即如何分裂區域,使得分裂后的子區域的特性盡可能都滿足一致性準則值
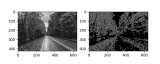
邊緣檢測:
在視覺計算理論框架中,抽取二維圖像上的邊緣、角點、紋理等基本特征,是整個系統框架中的第一步。這些特征所組成的圖稱為基元圖。
在不同“尺度”意義下的邊緣點,在一定條件下包含了原圖像的全部信息。
定義:
?目前,具有對邊緣的描述性定義,即兩個具有不同灰度的均勻圖像區域的邊界,即邊界反映局部的灰度變化。
?局部邊緣是圖像中局部灰度級以簡單(即單調)的方式作極快變換的小區域。這種局部變化可用一定窗口運算的邊緣檢測算子來檢測。
邊緣的描述:
1) 邊緣法線方向——在某點灰度變化最劇烈的方向,與邊緣方向垂直;
2) 邊緣方向——與邊緣法線方向垂直,是目標邊界的切線方向;
3) 邊緣強度——沿邊緣法線方向圖像局部的變化強度的量度。
邊緣檢測的基本思想是通過檢測每個像素和其鄰域的狀態,以決定該像素是否位于一個物體的邊界上。如果一個像素位于一個物體的邊界上,則其鄰域像素的灰度值的變化就比較大。假如可以應用某種算法檢測出這種變化并進行量化表示,那么就可以確定物體的邊界。
邊緣檢測算法有如下四個步驟:
濾波:邊緣檢測算法主要是基于圖像強度的一階和二階導數,但導數的計算對噪聲很敏感,因此必須使用濾波器來改善與噪聲有關的邊緣檢測器的性能.需要指出,大多數濾波器在降低噪聲的同時也導致了邊緣強度的損失,因此,增強邊緣和降低噪聲之間需要折衷.
增強:增強邊緣的基礎是確定圖像各點鄰域強度的變化值.增強算法可以將鄰域(或局部)強度值有顯著變化的點突顯出來.邊緣增強一般是通過計算梯度幅值來完成的.
檢測:在圖像中有許多點的梯度幅值比較大,而這些點在特定的應用領域中并不都是邊緣,所以應該用某種方法來確定哪些點是邊緣點.最簡單的邊緣檢測判據是梯度幅值閾值判據.
定位:如果某一應用場合要求確定邊緣位置,則邊緣的位置可在子像素分辨率上來估計,邊緣的方位也可以被估計出來.
在邊緣檢測算法中,前三個步驟用得十分普遍。這是因為大多數場合下,僅僅需要邊緣檢測器指出邊緣出現在圖像某一像素點的附近,而沒有必要指出邊緣的精確位置或方向.邊緣檢測誤差通常是指邊緣誤分類誤差,即把假邊緣判別成邊緣而保留,而把真邊緣判別成假邊緣而去掉.邊緣估計誤差是用概率統計模型來描述邊緣的位置和方向誤差的.我們將邊緣檢測誤差和邊緣估計誤差區分開,是因為它們的計算方法完全不同,其誤差模型也完全不同.
邊緣檢測的三個共性準則:
?好的檢測結果,或者說對邊緣的誤測率盡可能低,就是在圖像邊緣出現的地方檢測結果中不應該沒有;另一方面不要出現虛假的邊緣;
?對邊緣的定位要準確,也就是我們標記出的邊緣位置要和圖像上真正邊緣的中心位置充分接近;
?對同一邊緣要有盡可能低的響應次數,也就是檢測響應最好是單像素的。
幾種常用的邊緣檢測算子主要有Roberts邊緣檢測算子,Sobel算子、Prewitt算子、Krisch邊緣算子,高斯-拉普拉斯算子。
圖像特征:
?圖像特征是指圖像中可用作標志的屬性,它可以分為統計特征和視覺特征兩類。
?圖像的統計特征是指一些人為定義的特征,通過變換才能得到,如圖像的直方圖、矩、頻譜等;
?圖像的視覺特征是指人的視覺可直接感受到的自然特征,如區域的亮度、紋理或輪廓等
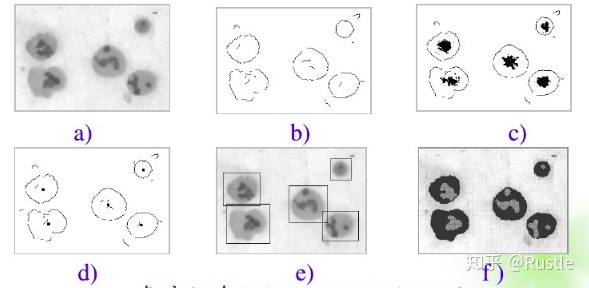
輪廓提取:
二值圖像輪廓提取的算法非常簡單, 就是掏空內部點: 如果原圖像中有一點為黑,且它的8個鄰點都是黑色時,說明該點是內部點, 將該點刪除(置為白色像素值255)。對圖像中所有像素點執行該操作便可完成圖像輪廓的提取。
模板匹配:
模板匹配是指用一個較小的圖像,即模板與源圖像進行比較, 以確定在源圖像中是否存在與該模板相同或相似的區域, 若該區域存在, 還可確定其位置并提取該區域。
形狀匹配:
形狀也是描述圖像內容的一個重要特征, 利用形狀進行匹配需要考慮三個問題。首先,形狀常與目標聯系在一起,所以相對于顏色, 形狀特征可以看作是更高層次的圖像特征。要獲得有關目標的形狀參數,常常要先對圖像進行分割, 所以形狀特征會受圖像分割效果的影響。其次,目標形狀的描述是一個非常復雜的問題,至今還沒有找到能與人的感覺相一致的圖像形狀的確切數學定義。最后,從不同視角獲取的圖像中目標形狀可能會有很大差別,為準確進行形狀匹配,需要解決平移、 尺度、 旋轉變換不變性的問題。
標的形狀常常可以用目標的輪廓來表示,而輪廓是由一系列邊界點所組成的。一般認為,在較大尺度下常常能較可靠地消除誤檢并檢測到真正的邊界點, 但在大尺度下對邊界的定位不易準確。相反,在較小尺度下對真正邊界點的定位常比較準確,但在小尺度下誤檢的比例會增加。所以,可考慮先在較大尺度下檢測出真正的邊界點,再在較小尺度下對真正邊界點進行較精確的定位。小波變換和分析作為一種多尺度、 多通道分析工具,比較適合對圖像進行多尺度的邊界檢測。



















 工商網監
工商網監
評論