完善資料讓更多小伙伴認(rèn)識你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 汽車電子
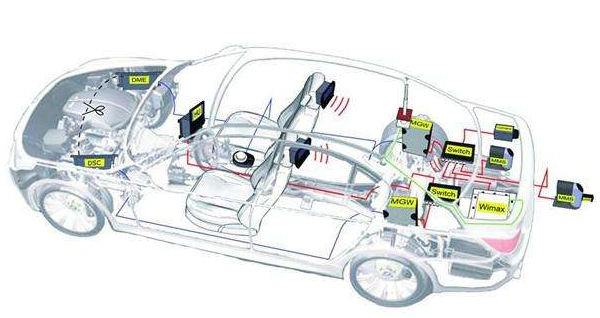
汽車電子是車體汽車電子控制裝置和車載汽車電子控制裝置的總稱。車體汽車電子控制裝置,包括發(fā)動機(jī)控制系統(tǒng)、底盤控制系統(tǒng)和車身電子控制系統(tǒng)(車身電子ECU)。
文章:7265個(gè) 瀏覽:169874次 帖子:405個(gè)
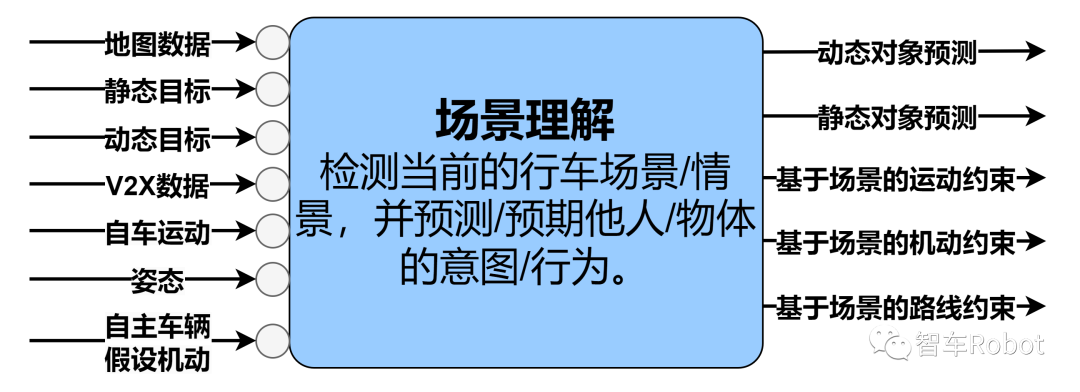
場景理解 場景理解功能模塊圖場景理解功能模塊體現(xiàn)了負(fù)責(zé)“理解”當(dāng)前駕駛場景的算法。如果自主車輛要在共享的駕駛空間中進(jìn)行智能操縱,則有必要預(yù)測/預(yù)見該空間...
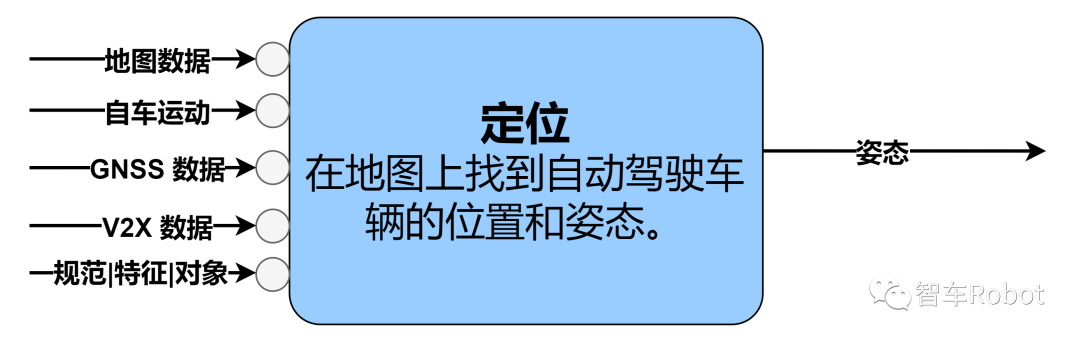
定位 定位功能模塊圖在駕駛員輔助或自動駕駛車輛的背景下,定位是指識別車輛在世界和車輛地圖子系統(tǒng)中的姿態(tài)(位置和方向)的過程。這個(gè)過程可能依賴于各種傳感器...
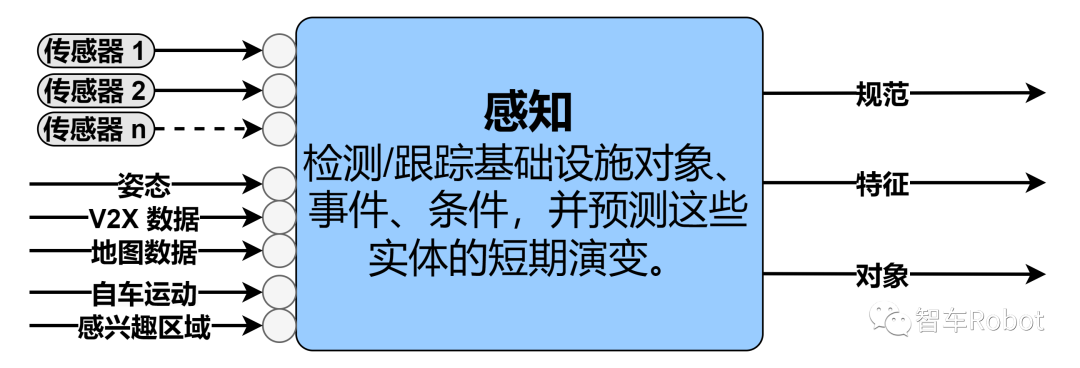
感知功能模塊負(fù)責(zé)檢測、分類和跟蹤自主車輛附近的實(shí)體和事件。來自車載傳感器的數(shù)據(jù)可與其他來源的信息相結(jié)合,如高清地圖、V2X或互聯(lián)服務(wù),以完成此任務(wù)。感知...
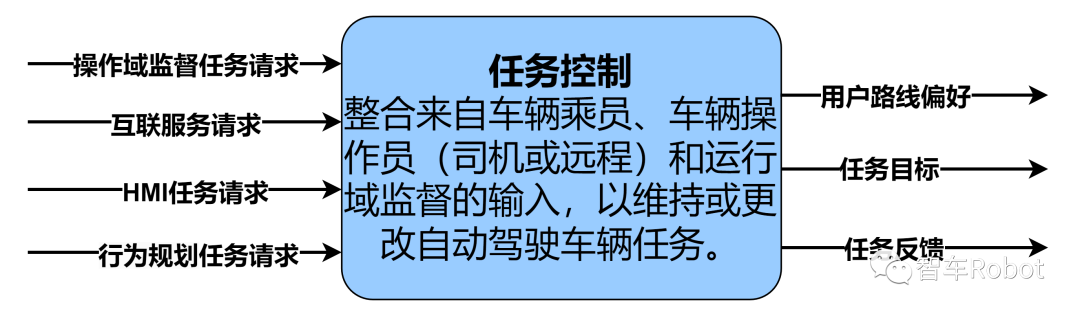
任務(wù)控制 任務(wù)控制任務(wù)控制組合了來自車輛乘員、車輛操作者(司機(jī)或遠(yuǎn)程操作者)和操作域監(jiān)督的輸入,以維持或改變自動駕駛車輛任務(wù)問題目標(biāo)和邊界到路徑規(guī)劃。在...
1.1 ADS核心計(jì)算模塊(藍(lán)色塊部分) 感知模塊 - 使用傳感器數(shù)據(jù)、車輛里程計(jì)數(shù)據(jù)和后端信息(即地圖數(shù)據(jù))來檢測和跟蹤傳感器視野內(nèi)的基礎(chǔ)設(shè)施和對象,...
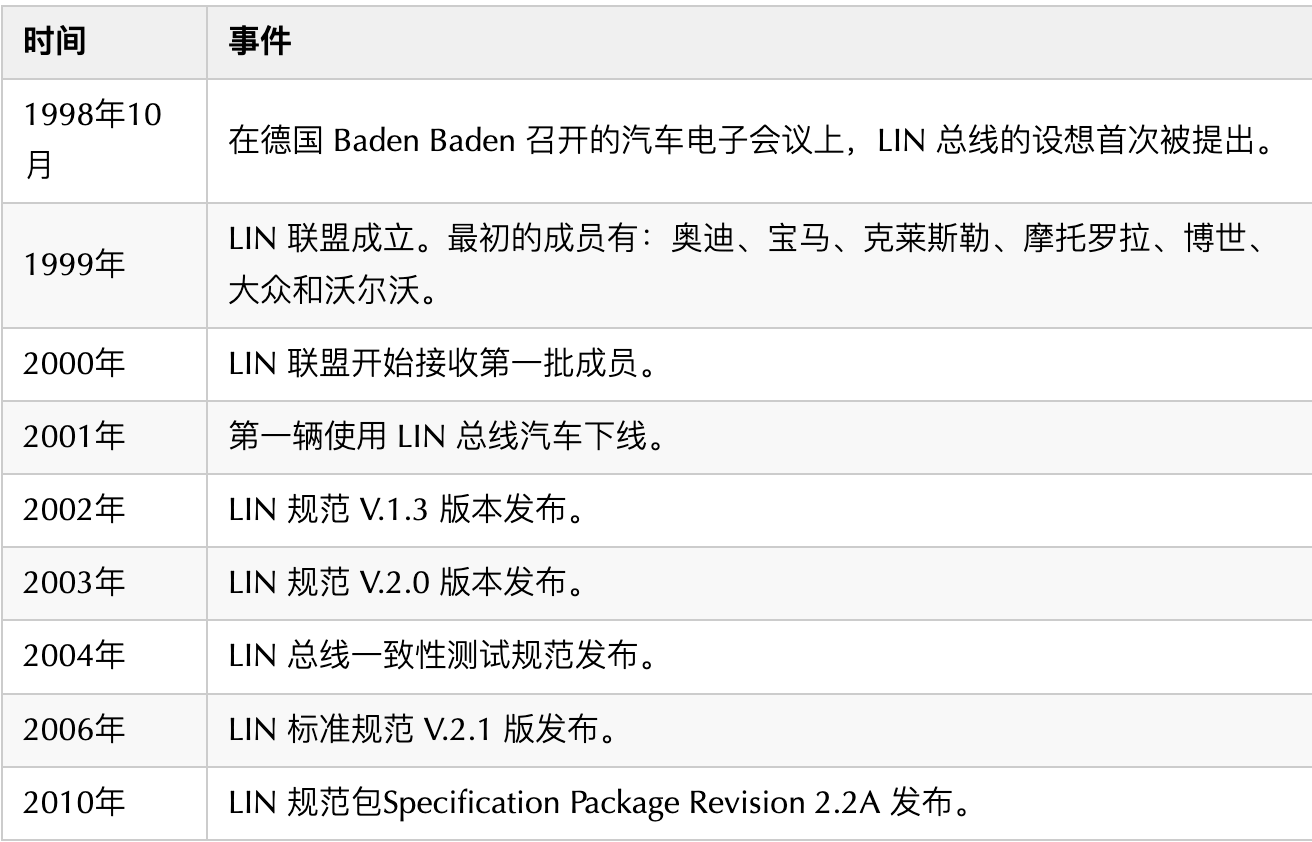
本地互聯(lián)網(wǎng)絡(luò) LIN(Local Interconnect Network)總線協(xié)議,是基于UART/SCI(Universal Asynchronou...
2023-09-22 標(biāo)簽:微控制器汽車電子電平轉(zhuǎn)換器 6213 0

在新冠肺炎大流行撼動汽車業(yè)之前所有其他行業(yè)的電動汽車都在穩(wěn)步進(jìn)入聚光燈。電池電動汽車和插入式汽車的年銷售組合混合動力電動汽車翻了兩百萬輛車的標(biāo)志第一次在...
汽車PCB板的特點(diǎn)汽車PCB板具有抗振動、抗高溫、抗腐蝕的特點(diǎn),以適應(yīng)汽車所處的惡劣環(huán)境;其材料和制造工藝要求更高,以保證電路板的穩(wěn)定性和可靠性。
近年來,汽車電子技術(shù)快速發(fā)展,帶來的安全問題日益突出,人們對功能安全的需求越來越強(qiáng)烈,在汽車電機(jī)控制應(yīng)用,即使是“低端”電機(jī)控制應(yīng)用也越來越需要滿足AS...
冗余的決策路徑可能是用于決策 -使用原始數(shù)據(jù)計(jì)算ADAS -使用對象數(shù)據(jù)的替代路徑 -域控制器評估這兩個(gè)數(shù)據(jù) 作出決定的集合

復(fù)雜系統(tǒng)需要集中協(xié)調(diào)系統(tǒng)中多個(gè)組件的推進(jìn)域控制器:隔離以啟用多個(gè)虛擬ECU。
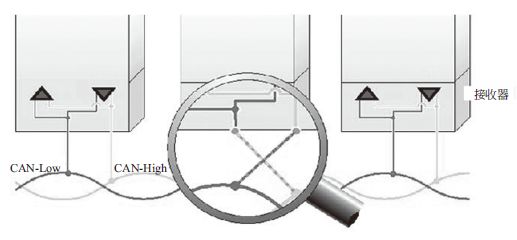
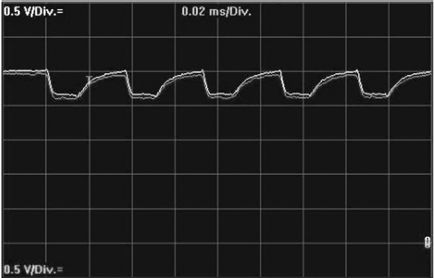
當(dāng)出現(xiàn)CAN L 與CAN H 導(dǎo)線互相接反這種故障時(shí),一般情況下,接錯(cuò)的那個(gè)控制模塊將無法通信,其他控制模塊的通信則正常。CAN L 與CAN H導(dǎo)線...
CAN L對帶電源(正極)短路 當(dāng)出現(xiàn)CAN L 對電源(正極)短路這種故障時(shí),根據(jù)CAN總線的容錯(cuò)特性,可能出現(xiàn)整個(gè)CAN網(wǎng)絡(luò)無法通信的情況或產(chǎn)生相關(guān)...
當(dāng)出現(xiàn)CAN L 對地短路這種故障時(shí),根據(jù)CAN總線的容錯(cuò)特性,可能出現(xiàn)整個(gè)CAN網(wǎng)絡(luò)無法通信的情況或產(chǎn)生相關(guān)故障碼。 但是對于某些車系,如海馬車系,其...
CAN H對地短路 當(dāng)出現(xiàn)CAN H 對地短路這種故障時(shí),根據(jù)CAN總線的容錯(cuò)特性,可能出現(xiàn)整個(gè)CAN網(wǎng)絡(luò)無法通信的情況或產(chǎn)生相關(guān)故障碼。 CAN H ...
CAN H對電源(正極)短路當(dāng)出現(xiàn)CAN H對電源(正極)短路這種故障時(shí),根據(jù)CAN總線的容錯(cuò)特性,可能出現(xiàn)整個(gè)CAN網(wǎng)絡(luò)無法通信的情況或產(chǎn)生相關(guān)故障碼...
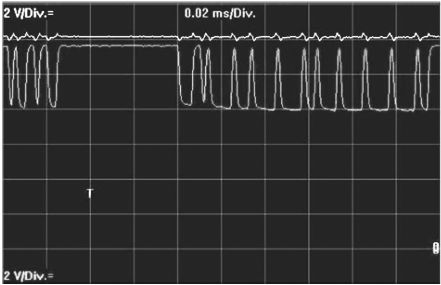
CAN H與 CAN L短路 當(dāng)CAN H 與CAN L 短路時(shí),CAN網(wǎng)絡(luò)會關(guān)閉,無法再進(jìn)行通信。會有相應(yīng)的網(wǎng)絡(luò)故障碼。CAN H 與CAN L短路的...
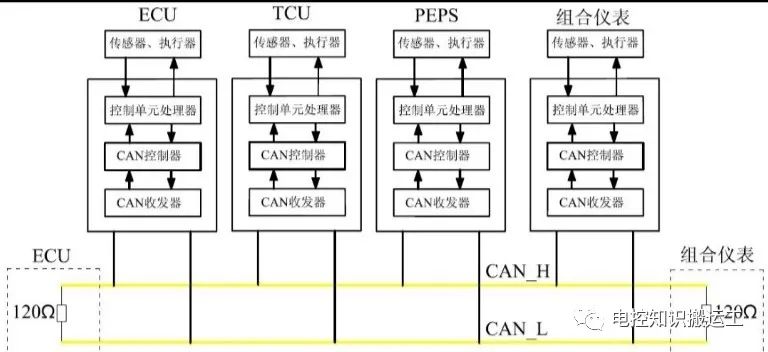
1、CAN總線的常見故障 CAN總線錯(cuò)誤分析與解決 當(dāng)CAN總線出現(xiàn)故障或數(shù)據(jù)傳輸異常時(shí),往往會出現(xiàn)多種奇怪的故障現(xiàn)象,如儀表板顯示異常,車輛無法啟動,...
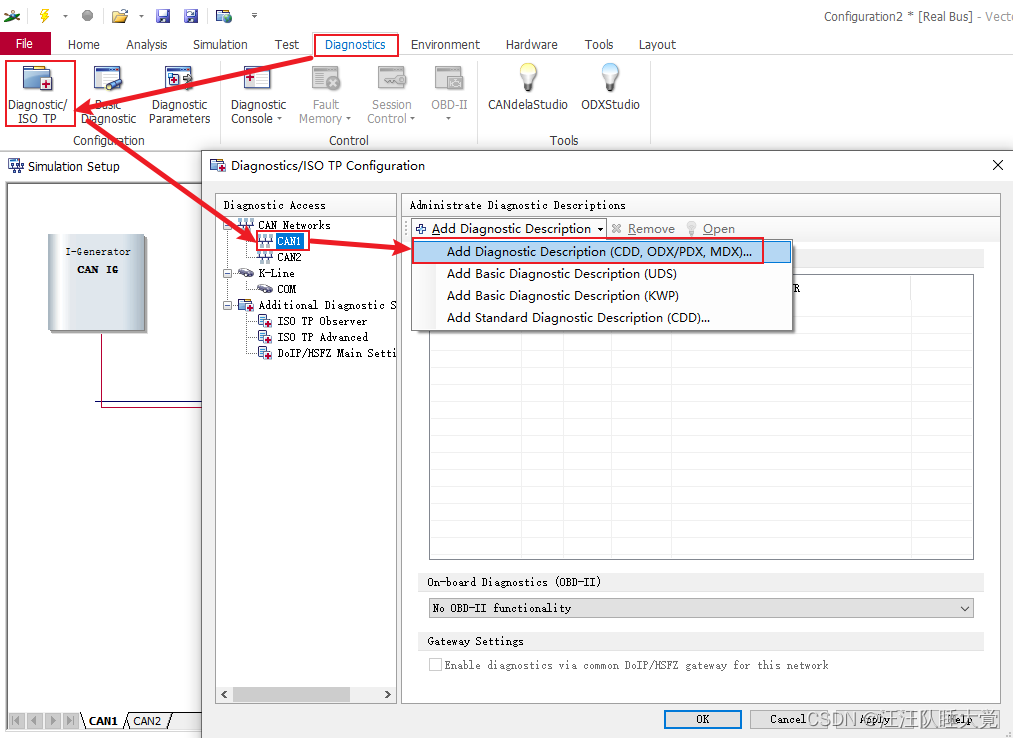
Cdd導(dǎo)入方式添加診斷幀 實(shí)際項(xiàng)目時(shí),車廠或者Tier1會輸入cdd文件,集成了所有用到的診斷命令。 通過cdd發(fā)送診斷幀的方式如下 導(dǎo)入cdd文件 c...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺 | 無人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1